论文总字数:23150字
目 录
1 绪论 1
1.1 研究背景 1
1.2 国内外研究现状 1
1.3 研究目的和研究意义 2
1.4 研究内容 2
2 设备追踪定位的理论基础 3
2.1 Meanshift跟踪定位的理论基础 3
2.2 Camshiftamp;Kalman跟踪定位的理论基础 5
2.2.1 Camshift算法流程 5
2.2.2 Kalman算法流程 5
2.3 Compressive-Tracking的理论基础 7
2.3.1 压缩感知(Compressive-Sensing) 7
2.3.2 压缩跟踪(Compressive-Tracking) 8
3 系统框架设计 13
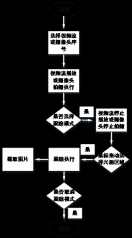
3.1 设备跟踪定位模式 13
3.2 视频流跟踪定位 14
3.2.1 Meanshift程序设计 16
3. 2.2 Camshift程序设计 17
3. 2.3 Camshiftamp;Kalman程序设计 17
3. 2.4 Compressive-Tracking程序设计 17
4 系统功能实现 19
4.1 图片加载定位 21
4.2 视频流加载定位 22
4.3 图片截取 24
4.4 版本说明 24
5 系统运行分析 27
5.1 Meanshift算法运行分析 27
5.2 Camshift算法运行分析 28
5.3 Camshiftamp;Kalman算法运行分析 29
5.4 Compressive-Tracking算法运行分析 30
6 结论 31
7 展望 32
参考文献: 33
致谢 35
基于空间物体特征的设备定位系统
沈新锋
, China
Abstract: This thesis mainly discusses the related algorithm about the indoor high precision orientation. Its main idea is that the software tracks and positions the selected object automatically in real-time according to the characteristics of the image. In certain applications, for the indoor mobile robots, the system provides a reliable solution. This thesis mainly studies Meanshift, Camshift, Camshiftamp;Kalman, Compressive-Tracking. After strict derivation and optimization of the corresponding algorithm, it uses the flexible programming modes and has reached the preset goal of opening basically. In order to handle images more easily, we have used the image processing library OpenCV, finally compiles and forms a set of tracking and positioning system of high quality and high efficiency.
Keywords: tracking and Positioning, Mobile Robots, OpenCV
1 绪论
- 研究背景
在人工智能AI高速发展的今天,室内移动式机器人的智能服务更加人性化,与此同时,智能服务对室内定位技术的要求也越来越高。如何建立合理的空间模型,如何为机器人规划一个完美的路径以及如何捕获机器人移动偏差值去矫正机器人的工作状态,这对于室内定位的精度要求很高,本文针对这些科技上的难题进行相应的研究工作。
- 国内外研究现状
近年来,以人工智能、虚拟现实和无人机为代表发展的企业层出不穷,这也表示了这样的技术正快速融入人们的生活。移动式机器人正充分融入这样的技术,发展十分迅速,占领了各个市场,在各个领域为人类提供便捷服务。当下,世界各地的企业和研究所正加紧研究智能的自主移动的机器人在危险和极端的环境下替代人工操作。宏观角度上,移动智能机器人是指在未知环境中,更够感知周边环境、对紧急状况的判别和路径规划、控制和执行相应命令等功能于一体的自动管理的智能化系统。它能够根据环境特征进行识别,快速地处理海量数据,自主规划,自主学习,自主适应,提供与人类交互的接口,准确快速完成指定的任务。这样的智能系统涉及计算机视觉、模式识别、数据滤波和融合、人工智能和自动控制等诸多学术技术和理论,体现了计算机技术和人工智能的最新研究成果。
移动式机器人室内的广泛应用带动了视觉技术的发展,自主移动机器人定位系统已有广泛的研究。室内定位方法多种多样,如Wi-Fi定位技术、红外定位技术和超声波定位技术等,而越来越多的定位系统使用了视觉传感器,模拟摄像头或是数字摄像头或是其他种类。智能水下机器鱼反馈通道上使用了摄像头进行定位,匿名科创四旋翼的定位也同样采用了摄像头,因此本设计针对摄像头定位技术进行研究。物体包含了丰富的信息,如颜色、形状和距离等,算法设计拓展空间比较大。采用摄像头进行视觉定位,价格低廉,使用方便,应用广泛。借助相关图形开发库和图像处理理论,此系统可以通过采集图像、分析图像、获得有效信息等手段来达到各种设计的目的,并且可处理的信息量也十分庞大,可以选择兴趣数据来更好地为用户服务。
国外特别重视视觉定位技术的发展。美国航天局研制的勇气号和机遇号成功登陆上火星,他们共安装了9个摄像机,共有6个用于导航,将摄像头获取的视频流用于视觉导航,寻找太阳的位置来决定下一步所需要达到的点;3个用于科学探测,用于精确地检测目标点。美国密苏里州的两个软件工程师就制作了魔方机器人,通过视觉反馈,可以快速还原魔方颜色。Google公司的人形机器人atlas可以适应外界干扰环境,在重击下可以爬起来,还可以搬取较重的物体,同样也依靠了视觉处理技术。
- 研究目的和研究意义
设计一种针对室内移动式机器人特征的识别提取,依赖相关灵活的算法,对移动式机器人进行精确定位的系统。该系统可以作为反馈通道,跟踪密闭空间机器人移动状况,帮助机器人寻找最优路径,帮助机器人寻找物体等。
- 研究内容
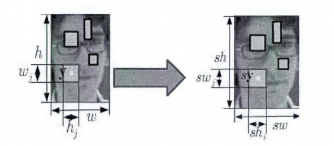
本系统主要针对室内定位技术进行研究,借助于OpenCV 相关图像处理库,理解算法原理,并改良算法设计,能够准确地对移动式机器人进行室内定位。物体的特征有颜色、形状、纹理以及距离等,从而可以采集物体的特征,在定位的过程中,通过与手动选定的目标进行比对,从而达到实时监控物体的目的。
本系统主要比较相关定位算法的优劣,如 Meanshift算法、Camshift算法和Compressive-Tracking算法等,在比对算法后,针对特定移动式机器人的定位,对算法进行改良。由于环境干扰,我们可能要选取物体的多种特征进行定位,因此需要将数据进行融合,同时对相关数据进行预测,需要借助相关算法对数据进行分析处理。
为了展示友好的人机界面,该软件提供了提示的信息,可供用户选择,查看处理效果。设计语言选择C/C ,在编写相关软件的时候可以考虑到内存管理以及程序运行的时间效率和空间效率,采用高质量的代码编写风格,尽量保证程序运行时内存可以达到最小,算法实现可以更加灵活。
2 设备追踪定位的理论基础
- Meanshift跟踪定位的理论基础
 算法实际上是一种聚类跟踪。一帧图像就是一个矩阵,像素点均匀分布在图像上,因为像素点表示的颜色和亮度等特征,所以没有稠密性。该算法最重要的思想便是计算各个点的概率密度,根据点的稠密特征,不断收敛,最终到达目标位置。在收敛的时候,在选定的以x为圆心,以h为半径d额球内,我们依据两个原则,一是像素点颜色与x相近的我们定义概率密度越高,靠近x的定义的概率密度越高,根据这两个规则,就可以收敛了。
算法实际上是一种聚类跟踪。一帧图像就是一个矩阵,像素点均匀分布在图像上,因为像素点表示的颜色和亮度等特征,所以没有稠密性。该算法最重要的思想便是计算各个点的概率密度,根据点的稠密特征,不断收敛,最终到达目标位置。在收敛的时候,在选定的以x为圆心,以h为半径d额球内,我们依据两个原则,一是像素点颜色与x相近的我们定义概率密度越高,靠近x的定义的概率密度越高,根据这两个规则,就可以收敛了。
根据 理论,核函数应满足如下条件:
理论,核函数应满足如下条件:
对于任意 且
且 ,则有
,则有 成立,其中
成立,其中 可以作为核函数。常用的核函数有
可以作为核函数。常用的核函数有 ,
, ,
, 等,在
等,在 算法中,应用到了
算法中,应用到了 核函数,其函数模型为:
核函数,其函数模型为:
 (2-1)
(2-1)
根据(2-1)核函数模型, 算法变形为:
算法变形为:
剩余内容已隐藏,请支付后下载全文,论文总字数:23150字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

