论文总字数:17485字
目 录
第一章 绪论 5
1.1研究背景及意义 5
1.2国内外研究现状 5
1.3 研究目的与内容 6
第二章 总体设计方案 7
2.1 无人机预测飞行轨迹难点 7
2.2总体设计方案 7
第三章 预测轨迹算法实现 8
3.1获取无人机历史坐标数据 8
3.2GPS坐标转换成平面直角坐标 9
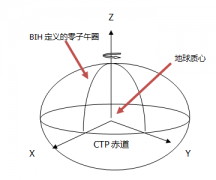
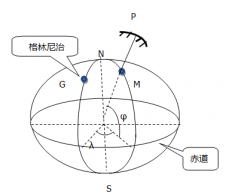
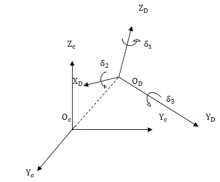
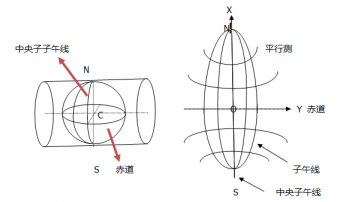
3.2.1坐标系统介绍 9
3.2.2坐标转换算法基本思想及数学模型 10
3.2.3 坐标转换的设计与实现 13
3.3预测飞行轨迹算法 14
3.3.1轨迹预测算法思想 14
3.3.2 最小二乘曲线拟合算法拟合原理 14
3.3.3改进算法下预测轨迹的实现与设计 15
第四章 实验 18
4.1 实验准备 18
4.2 实验展示与分析 18
4.2.1实验展示 18
4.2.2改进算法预测飞行轨迹的实时性与准确性分析 20
第五章 结束语 23
参考文献: 24
致谢 25
四旋翼无人机飞行轨迹预测算法研究
王帆
计算机与软件学院, 20141375033
摘要:随着航空技术以及计算机技术的发展,多旋翼无人机军事和民用领域内的应用越来越普及,同时它的飞行安全问题也得到越来越多的关注。预测出无人机的轨迹就可以提前避免无人机发生碰撞以及减少安全事故的发生。本文设计了一个四旋翼无人机飞行轨迹预测算法,采用了坐标转换和最小二乘拟合算法来预测无人机的飞行轨迹。为了便于轨迹的预测,先将was-84空间大地坐标参数转换成我国常用的BJ-54平面坐标,然后用改进式的最小二乘算法即将当前飞行的下一时刻舍去最末尾的坐标点的并加上最新的坐标点,以此不间断的预测出新的飞行轨迹。最后利用matlab仿真实验对预测的飞行轨迹进行展示。并通过实验对比分析来对改进算法预测轨迹的准确性和实时性做出判断。
关键词: 最小二乘算法 无人机 飞行轨迹预测
Study on the flight trajectory prediction algorithm of
the quadrtor UAV
Wangfan
School of computer and software, NUIST, Nanjing, 20141375033,china
Abstract: With the development of aviation technology and computer technology, the application of multi-rotor UAV in military and civil field has become more and more popular, and its flight safety issue has received more and more attention. Predicting the trajectory of the UAV can prevent the collision of the UAV in advance and reduce the occurrence of safety accidents. In this paper, a four-rotor UAV flight path prediction algorithm is designed, which uses coordinate transformation and least square fitting method to predict the flight path of UAV. To facilitate the trajectory prediction, first of all, the space WGS - 84 geodetic coordinate parameters in common use in our country is converted to BJ - 54 plane rectangular coordinates, and then with the least squares algorithm improved type that the current flight at the end of the next moment to leave the most of the coordinates of the point and combined with the latest the coordinates of the point, non-stop to predict new flight path. Finally, matlab simulation experiment is used to show the predicte- d flight path. The accuracy and real time of the improved algorithm are judged by experimental comparison and analysis.
Key words: the least square fitting method UAV flight trajectory prediction
第一章 绪论
1.1研究背景及意义
无人机(UAV)是无人驾驶飞机的简称,无人机的操纵由无线电遥控设备以及自备的程序控制装置完成。相较于单旋翼的无人机,四旋翼的无人机布局更加的简单,而且容易控制,它通过机身上持有四个电机增加或减缓其转动速度使它的四个旋翼产生上升的力量,以此,对四旋翼飞行器飞行姿态实行控制,因为四旋翼无人机是十字型对称结构,所以稳定性也更加的优越。除此以外,四旋翼无人机飞行时的隐蔽性更加的强,即使在微小的空间中也能执行任务同时产生的噪声小。所以,四旋翼无人机有很大的应用潜力。
从技术层面上来说,四旋翼无人机轨迹预测技术的研究不仅有利于减少其飞行事故的发生概率,还有利于增强它在交通方面的飞行秩序。轨迹预测技术还可以与无人机的监测技术相结合,实现对未知区域的预警。从社会层面上来说,无人机轨迹预测技术的发展可以促使四旋翼无人机更加安全,可靠的的运用到民用生活以及军事领域中,减少无人机在执行任务时发生危险的概率,提升其安全系数。所以,针对四旋翼无人机轨迹预测方面的研究是有必要且有意义的。
1.2国内外研究现状
1907年Breguet兄弟研制出了第一架四旋翼无人机,这架无人机机身是焊接呈十字形架构的四根钢管,被取名为Breguet-Richet旋翼机1号。但是这架无人机并不能实现稳定的飞行,它只是将四旋翼无人机由概念转变成了现实,但从历史意义上来说,它是四旋翼无人机发展史上的重要一步,推动了四旋翼无人机向前发展。
1956年,在纽约的Amitycille,Convertawings制造了一架带用两个发动机的四旋翼飞行器,这架四旋翼直升机依靠四个螺旋桨不断地改变自身的转速使其产生上升的推力来达到飞行的目的。

图1.1 Breguet兄弟的四旋冀直升机 图1.2 Convertawing制造的四旋冀直升机
在那段时期里,设计大多是以载人四旋翼飞行器为主,但这种原始的飞行器不仅性能和稳定性较差而且可操作性和实用性很低,所以,在之后的几十年中,因为外界条件不充分,技术水平不成熟等原因,旋翼无人机几乎没有向前继续发展。
但最近几十年来,由于空气动力学、航空学、材料技术、计算机技术等领域的迅猛发展,为四旋翼无人机等多种无人机的发展创造了良好的技术支撑和研究平台,使得无人机的研究取得了重大的突破,而且引起了无人机新一轮的研究热潮。在之后的一段时间里,四旋翼无人机的噪声问题,单片机的运算速度,和滤障问题逐步得到了解决,直到2005年左右,拥有稳定性能的多旋翼无人机自动控制器诞生。法国Parrot公司在2010年发布了世界上首款流行的四旋翼飞行器AR.Drone。[11]


图1.3 AR.Drone 1.0 图1.4 AR.Drone 2.0
飞行体目标跟踪的基本概念在上个世纪的五十年代已经被提出,但是,直到卡尔曼滤波理论在目标飞行体跟跟踪中得到成功的应用,目标飞行体的跟踪预测技术才得以形成,以此轨迹预测以及通过滤波对目标运动状态进行估计和预测来消除目标相关的不确定性等技术才开始发展。
1960年R.E.Kalman等人提出的Kalman滤波方法是现代雷达数据处理用于目标跟踪的理论基础。卡尔曼滤波算法是第一个将现代控制理论中的状态空间思想引入最优滤波理论的算法并且它将系统动态模型和观测模型描述成状态方程与观测方程。不仅如此,卡尔曼滤波算法还可用于处理时变系统,而且它采用的是递推计算,可以在计算机上可以轻易实现。但是,卡尔曼滤波需要线性系统同时系统内部还得具有精确数学模型,噪声也必须是已知统计特性的高斯噪声,所以,如果出现机动目标,或者遇到其他类型的噪声和非线性系统,它的滤波性能会有很大的减弱。于是Bucy等人在此基础上提出扩展卡尔曼滤波(EKF)来解决这些问题并将卡尔曼滤波理论应用到了非线性领域中。扩展卡尔曼滤波算法本质上就是将非线性系统变为线性化,然后进行卡尔曼滤波,但EKF只是一种次优滤波,尤其是当系统为高度非线性或非高斯时,因为未考虑误差的分布情况,很容易发生滤波发散等情况。[17]
近年来,目标轨迹预测的算法也由简单的单模型卡尔曼滤波算法,发展到多种模型交互合作的复杂算法,基于自适应的卡尔曼滤波算法在阿波罗登月的研发过程中,卡尔曼为了解决惯导系统的误差累计问题,首次给出了线性卡尔曼滤波的估计算法,又因为与跟踪运动目标的本质上的契合,所以很快被应用到了目标跟踪领域。
目前,主要从三个方面开展轨迹预测算法的研究,一个是基于神经网络或交互式多模型滤波等的预测研究,其模型简单且无需大量数据的输入,但是由于输入数据量偏少,就容易导致性能提升的空间比较小,拟合生成的误差较大剖面。还有就是基于航空器飞行模型和空气动力学模型的航迹预测算法。除此以外,还有基于数据挖掘的轨迹预测算法。[13]
1.3 研究目的与内容
本文主要研究了四旋翼无人机预测飞行轨迹算法,最主要的就是曲线轨迹拟合算法。
无人机行业在近年以来快速发展的同时,也显露出了很多问题,无人机的高速度,以及在飞行时的无秩序,经常会引起无人机之间的碰撞,以及自身的安全问题。为了减少无人机与其他的碰撞,以及躲避飞行路途中的障碍,对即将遇到的未知危险作出判断,预测出下一时刻的飞行轨迹是非常必要的。本文的研究内容是通过已获取的历史轨迹坐标完成对下一时刻飞行轨迹的预测,首先使用坐标转换算法把获取的GPS坐标转换成 平面直角坐标,然后利用改进式的最小二乘算法不断的更新新时刻的预测轨迹,完成对飞行轨迹的预测。
第二章 总体设计方案
由于多旋翼无人机在飞行时的高速移动,使得多旋翼无人机的轨迹预测成为了一个难点。为了尽可能解决轨迹预测时遇到的飞行路线不规则,飞行方向不确定的问题,提出了一种利用改进式最小二乘拟合算法预测轨迹的方案。
2.1 无人机预测飞行轨迹难点
无人机的高速移动导致的问题就是难以预测它的飞行轨迹。主要的原因有两个:(1)无人机在飞行时,飞行路线是随机的,线性还是非线性是没有规律可循的。(2)外界环境导致的问题,如障碍物,禁飞区,其他飞行器等,都会引起无人机突然改变飞行的方向,甚至可能与原方向完全背离。而且,又因为无人机飞行这项运动其自身就存在这未知性,所以,根据某一时刻或者某一小段的离散数据预测出来的轨迹其准确性是没有说服力的,从逻辑思维上来说,这种思想也是不合理的。
无人机的轨迹预测其根本的目的是提前得知无人机的整体运动趋势,来及时避免事故或者问题的产生,所以无人机在某一个点的运动趋势并不是我们研究的重点。而且我们可以依据泰勒级数使用无限项的连加式--级数表示出一个函数,而这些项都是通过某一个点的导数得出的原理,既然常见函数的展开式都可以化为幂级数,那么多项式函数也可以近似的代替一些常用函数,更进一步来说,最小二乘曲线拟合算法拟合出来的多项式函数表达式在一定程度上是可以反映当前一段时间该无人机的飞行轨迹的。 [2] 并且通过不间断的,有规律的重新预测新时刻的飞行轨迹,就可以避免当飞行遇到突发状况时,由于飞行轨迹突变发生的预测轨迹与现实飞行轨迹偏离的情况,这样就可以增加轨迹预测的准确性。
2.2总体设计方案
整个方案是为了解决轨迹预测的问题,本文利用了一种改进式的最小二乘算法来解决这个问题。根据无人机在飞行时获取的一系列离散坐标点,由于无人机整体飞行的轨迹趋势是有规律可寻循的,我们决定选取最小二乘法拟合曲线法进行离散数据坐标点的拟合,并且用五次多项式函数尽可能的保证不仅能反映出飞行轨迹的趋势还能保证预测出的轨迹精确性。
剩余内容已隐藏,请支付后下载全文,论文总字数:17485字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

