论文总字数:19292字
目 录
1 绪论 1
1.1 引言 1
1.2 国内外研究现状 1
1.3 异常驾驶行为识别的影响因素 1
1.4 研究意义 2
2 系统设计方案 2
2.1 MATLAB软件介绍 2
2.2 系统总体分析 2
2.3 系统结构设计 3
3 图像预处理 3
3.1 灰度化处理 4
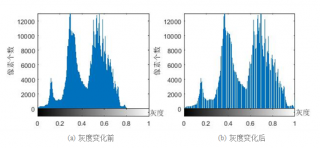
3.2 灰度增强 5
4 直线车道线及消失点检测 6
4.1 边缘检测 7
4.1.1 Sobel算子 7
4.1.2 Canny算子 7
4.1.3 基于自适应感兴趣区域的Sobel边缘检测 8
4.2 直线车道线检测 9
4.3 验证检测出的车道线 11
4.4 消失点的计算 12
5 异常驾驶行为识别 13
5.1 异常驾驶行为的具体表现 13
5.2 基于方向和位置偏移的双因子异常驾驶行为识别方法 15
6 曲率检测及弯道速度上限限定 16
6.1 图像预处理 17
6.2 基于体育比赛评分标准的曲率半径计算 19
6.3 弯道速度上限计算 20
7 实现与分析 20
7.1 部分关键函数 20
7.2 基于直线车道线的异常驾驶行为识别的实验结果 21
7.3 基于视频的异常驾驶行为识别的实验结果 22
8 结论 23
参考文献 23
致谢 26
基于车道线检测的异常驾驶行为识别研究
徐子茜
,China
Abstract: Abnormal driving behavior identification (ADBI) has become a research hotspot because of its significance in driver assistance systems. However, current methods still have some limitations in terms of accuracy and reliability under severe traffic scenes. This paper proposes a new ADBI method based on direction and position offsets, where a two-factor identification strategy is used to improve the accuracy and reliability of the ADBI. Self-adaptive edge detection based on Sobel operator is used to extract the edge information of lanes. In order to enhance the efficiency and reliability of lane detection, an improved lane detection algorithm is proposed, where a Hough transform based on local search scope is employed to quickly detect the lane, and a validation scheme based on priori information is proposed to further verify the detected lane. In addition, the calculation of curvature radius based on scoring criteria for sports competitions is used to obtain the highest speed of the bend ahead. Experimental results under various complex road conditions demonstrate the validity of the proposed ADBI.
Keywords: Abnormal driving behavior identification; Lane detection; Vanishing point detection; Improved Hough transform; Curve fitting
1 绪论
1.1 引言
随着中国车辆数量的飞速增加,车祸导致的死亡及伤害人数也不断攀升,如何降低频发的交通事故已成为我国一个亟需解决的问题。许多交通事故并不是因为汽车的某个零部件损坏造成的,而是由可以提前预防的人为因素造成的,如疲劳驾驶、分心驾驶等。据报道,2015年中国有274人因异常驾驶死亡,占车祸死亡总人数的8.9%。根据交通部提供的数据,大约有40%的交通事故是由于异常驾驶造成的。
值得高兴的是,随着运算速度更快的电脑和更为可靠的硬件传感器的出现,安全可靠的智能汽车正在登上历史的舞台。虽然从长远来看,驾驶员的工作终将被无人驾驶汽车代替,但着眼现在,在目前政策、监管等社会环境尚不明朗的前提下,人机共驾才是大多数人心理上及现行法律上可以接受的智能汽车驾驶模式,而异常驾驶行为识别,就是人机共驾系统中极其重要的一环。研究异常驾驶行为识别,可以帮助驾驶员提前预知可能的安全隐患,提醒驾驶员做出相应的操作,从而达到未雨绸缪的目的,最终大幅降低车祸发生的概率。这对于当今的驾驶辅助技术,及未来的自动化驾驶技术,都有着重要的实际意义。
1.2 国内外研究现状
目前,异常驾驶行为识别算法主要有三种:基于生理特征的异常驾驶行为识别算法,基于面部特征的异常驾驶行为识别算法,及基于车辆行为特征的异常驾驶行为识别算法。
基于生理特征的识别方法直接检测驾驶员的脑电图(EEG)和心电图(ECG) [1-4],具有较高的可靠性。然而,这种方法中使用的是直接接触驾驶员皮肤的检测设备,长期佩戴这些设备会不可避免地对驾驶员产生干扰,进而对道路安全构成不良的影响。
基于面部特征的识别通过相机实时提取驾驶者的面部特征,例如眨眼频率[5-6],来分析是否存在异常驾驶行为。但这种方法在检测佩戴眼镜的司机时准确率较低[7],且该方法多用在在检测疲劳驾驶领域,对于非法换道等异常驾驶行为无法辨识。
基于车辆行为特征的识别是根据车辆的输出性能(如方向盘角度的变化)来检测驾驶员的驾驶行为[8-10]。这种方法能够规避来自光线、天气等外部条件的干扰,但这种识别方法容易受到驾驶员驾驶习惯的影响。
综上所述,上述方法虽然能够达到识别异常驾驶行为的目的,但在复杂路况、光照不佳等条件下,现有的方法在准确性和可靠性方面,还有一定的局限性。
1.3 异常驾驶行为识别的影响因素
从一张图片中识别车道线,对于人类而言是一件很容易的事情,然而,计算机而言,车道线上的阴影、反光、或是车道线残缺,都会对识别结果造成很大影响。
在基于车道线检测的异常驾驶行为识别中,影响识别结果的主要因素如下:当图像中有其他边缘线的存在时,例如道路边界或高速公路屏障,可能会导致检测出伪车道线;光照气候条件不佳时获取到模糊、失真的图片,会导致检测车道线时无法获取准确的特征点,从而导致车道线检测准确率较低的情况;当车道线有磨损、残缺,或部分车道线被附近车辆遮挡时,会导致图像部分特征点缺失,从而影响识别效果。
1.4 研究意义
针对现有方法的局限性及上述影响因素,本文提出了一种基于车道线检测的双因子异常驾驶行为识别及弯道速度上限检测算法,它能在较复杂的环境下迅速准确地识别车道线,并进行异常驾驶行为识别,获取前方弯道的最高安全速度,有较高的准确性和实时性。
本文的贡献如下:
(1)提出了基于自适应感兴趣区域的Sobel边缘检测算法,通过前一帧检测出的车道线区域限制下一帧的边缘提取区域,对于视频检测,尤其是正在持续转向的视频部分,有着很好的检测效果。
(2)提出了一种基于双因子的异常驾驶行为识别算法,将方向和位置偏移一起作为识别条件。与目前仅考虑方向或位置偏移方面的现有技术相比,本文提出的算法把两个方面都考虑进来,能够提高异常驾驶行为识别的准确性和可靠性。
(3)提出基于先验信息的验证方法,进一步验证检测出的车道,有效消除道路边界和公路边界等典型干扰因素,提高车道线检测的可靠性。
(4)加入了弯道速度上限检测,能够实时计算出前方弯道的最高速度并提醒驾驶员注意,有效预防由于弯道车速过快导致车辆侧移等交通事故的发生。
2 系统设计方案
2.1 MATLAB软件介绍
本文使用MATLAB软件来实现具体功能。除了出色的数据处理能力外,MATLAB还给用户提供了便捷的符号运算、图像拟合绘制等功能。与C和Java等语言里冗长的代码不同,MATLAB中嵌入了丰富的函数资源,使用简洁的代码就能完成复杂的功能,并给用户提供了简约、大气的开发页面。
MATLAB软件的主要特征有:界面友好,系统中的很多工具都使用了图形化界面,且随着MATLAB的更新换代,其图形化界面操作也更为直接、简单;编程语言简单易用,支持面向对象的编程方式,无论是编程新手或是熟练的程序员,都能轻松上手;系统内置有数百个内部函数的主包及几十种工具包,这些算法都是相关领域的最前沿的成果,且经过了系统的优化、算法简化处理,可以方便地满足用户的各种运算需求,用户也可以利用这些源代码开发,符合自身需求特点的算法;图形处理能力极强,MATLAB使用向量及矩阵表示图形,除了具有数据处理软件都具有的功能,如数据拟合、图像绘制及处理等,还在图像光照处理、四维数据处理等领域也有着较为惊人的表现。
2.2 系统总体分析
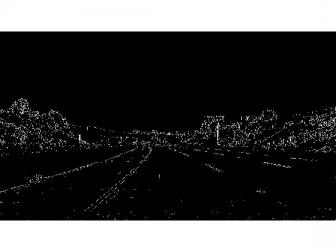
本文首先对输入的图片进行灰度化及灰度增强处理,通过增强车道线边缘特征,完成图像的预处理;然后使用基于自适应感兴趣区域的Sobel边缘检测算法提取出图片中的边缘特征信息;再通过对极径和极角设置约束条件,使用Hough变换提取图片中的直线车道线,可以提高车道线提取的效率;之后使用基于车道线和道路间的亮度差的验证算法,验证检测到的车道线是否为真车道线;最后,本文提出了一种基于偏移角和横向偏移的异常驾驶行为识别方法来判断是否发生异常驾驶行为。
为获得前方弯道处的最高速度上限,本文通过蒙版处理、去除异常点等步骤完成图像的预处理,再通过坐标转换、随机取点获得若干组曲率半径,然后使用基于体育比赛评分标准的算法确定最终的曲率半径,最后根据圆周运动规律,计算出前方弯道的速度上限。
2.3 系统结构设计
本设计分为6个模块,系统结构设计图如图1所示。
剩余内容已隐藏,请支付后下载全文,论文总字数:19292字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

