论文总字数:13672字
目 录
1 引言1
1.1研究意义1
1.2目标跟踪主要方法1
1.3国内研究成果 1
2 图像预处理2
2.1数字图像的灰度处理2
2.2基本形态变换消除图像噪声3
3背景差分法4
3.1背景差分法基本原理4
3.2目标跟踪 5
4卡尔曼滤波6
4.1卡尔曼滤波理论思想6
4.2卡尔曼滤波理论算法 6
5改进的特征比方法7
5.1目标状态描述与预测7
5.2基于特征比的目标速度的测算7
6 实验结果分析8
6.1对图像进行预处理 8
6.2目标的检测跟踪实现 9
6.3基于特征比的运动目标状态描述12
6.4多视频分析算法有效性14
7 结论与展望18
8 参考文献19
9 致谢19
视频中定时间定区域物体运动状态计算方法研究
邱安琪
,China
Abstract: A large number of short videos are enriching real life, and the search for short videos is becoming a research hotspot. This paper proposes a method to measure the state of motion of a target under the condition of time and area under the condition of feature ratio statistics. The specific steps of the method are as follows: 1) For the video of a single moving object with a stationary background, the video stream is converted into an image frame with MATLAB; 2 ) Perform binarization and noise elimination preprocessing on each frame of the image; 3) Track the moving object based on the application background difference method and Kalman filter, and improve the feature ratio method to calculate the moving target of the fixed-time and fixed-area video. Experiments show that the algorithm is convenient and effective, and can accurately estimate the real motion state of the moving target, which lays a foundation for further video monitoring.
Key words:target tracking;background difference method;Kalman filter; feature ratio
1 引言
1.1研究意义
众所周知,人类的视觉是一种高级的信息处理机制,通过视觉可以获取外界80%的信息,近年来,随着科技的进步,让数字计算机也拥有像人类一样的视觉功能,去处理复杂的信息成为了研究的热点问题。因此也促进了计算机视觉成为了热门研究课题。其中,对已获得的动态图像序列进行处理而获得我们需要的信息,这成为研究中一个很重要的部分。动态图像里包含了运动的物体,运动不仅仅指空间位置的变化,而也包含随时间变化时运动的物体相邻两帧图像之间的色彩及灰度发生了变化。我们可以从这一动态图像序列中识别运动目标并进行跟踪。运动目标的跟踪已经成为计算机视觉研究中的一个热点课题,它的核心思想是将图像分析、计算机视觉、图像处理、人工智能与模糊识别等众多科技手段整合起来,应用在准确、快速的识别运动目标的技术中[1]。目标跟踪在工业生产、医疗卫生、国防建设等领域已经得到了广泛的应用,因此对于目标跟踪这一课题的研究有着十分重要的现实意义。
1.2目标跟踪主要方法
运动目标跟踪[2]监测是对计算机获得的图像集进行处理,希望获得视频中运动的目标并进行轨迹跟踪,并描述物体运动状态。现阶段的运动目标检测技术主要有两个部分:运动目标的检测和运动目标的跟踪标记处理。其中,运动目标的检测是后续技术的基础,所以做好检测工作所利用的方法有效性是我们所追求的方向。运动目标的检测包括两种情况:静止背景下的目标检测和动态背景下的目标检测。本文主要研究静止背景的运动物体的跟踪检测,主要应用背景差分法进行目标检测。背景差分法[3]对于静态背景有很好的检测效果,优点是可以较完整地提取检测目标;缺点在与对于光照的变化、新物体的加入等突发情况,背景差分法的处理机制不能达到很好的效果。在现实应用中,帧差法[4]或背景差分法则被大量运用在实时跟踪系统中。
1.3国内相关研究成果
近年来目标跟踪的新技术层出不穷,12年提出的针对静态背景下运动目标检测[5],融合了帧间差分和背景差分思想,提出一种对于静态背景下可以实时的对运动目标进行检测的算法。并结合了多帧差分的思想可以进行自动提取以更新背景模型,该改进的算法克服了标准三帧差分目标有重叠的区域,可以提取完整的运动目标轮廓,差分后的信息只包含当前帧相对于前一帧目标运动变化,可以更加符合现实中运动目标运动范围。14年[6]提出了背景差分法与卡尔曼滤波进行结合的目标检测算法。这种算法在光照强度变化的情况下,可以很大程度上克服这种情况。14年基于视觉记忆的目标检测算法:一个特征学习与特征联想的过程[7]这篇论文在研究目标检测的工作机理时,对人类的视觉记忆机制进行了深度分析,在结合了研究团队提出的特征学习和特征联想的理论后,通过构建基于视觉记忆的特征学习与特征联想的模型后,开始研究模拟人类视觉智能的目标检测的课题研究。16年动态背景下运动目标检测与跟踪研究[8],这篇论文提出了一种基于C-V模型和卡尔曼滤波的算法,用来检测和跟踪动态背景下的运动目标。
本文利用背景差分法与卡尔曼滤波的整合算法进行对运动目标状态的描述,并新提出一种基于特征比的算法来进行静止背景内的运动目标的运动状态的检测与跟踪。
2 图像预处理
2.1数字图像的灰度处理
(1)图像的点运算
点运算(Point Operation)[9]是一种可以让用户改变图像数据占据的灰度范围的重要技术。用户可以应用计算机进行输入一幅图像,在经过图像的点运算后,输入的图像各像素点的灰度值影响到输出图像各像素点的灰度值,则我们可以得到一幅新的图像。
(2)图像的点运算设计思想
点运算通过我们实现规定好的函数变换后,可以改变一幅图像的灰度直方图。这样点运算则可以看做是“从像素到像素”的一种操作。我们将输入的图像设定为A(x,y),在经过点运算变换后,我们把输出图像设定为B(x,y),则点运算的算法可以表示为公式(1)。
 (1)
(1)
- 灰度直方图
灰度直方图[9]是对一幅图像的描述性工具,定义为一幅图像的该灰度值拥有多少个像素点的函数。横坐标为灰度值,纵坐标为该灰度值拥有像素点的频数。
- 灰度的线性变换
灰度线性变换定义为取一幅图像内的所有点的灰度值,后应用一个线性变换的函数进行灰度值变换。该线性灰度变换函数f(x)定义为一维线性函数如公式(2)所示。灰度变换方程如公式(3)所示。
 (2)
(2)
 (3)
(3)
其中fA定义为线性函数的斜率,fB为线性函数的在y轴的截距,DA表示输入图像的灰度值,DB表示输出图像的灰度值。
(5)灰度的阈值变换
引入图像f(x)的阈集如公式(4)所示,这里R幅值a取值于R或Z,取决于f(x)是模拟还是数字图像。利用阀值Ta(f)可重构图像如公式(5),如果引入Ta(f)的特征函数如公式(6),则fa(x)即给出了一个二值图像。
 (4)
(4)
 (5)
(5)
 (6)
(6)
(6)灰度拉伸
灰度拉伸定义为分段的线性变换。它的灰度变换函数表达式如公式(7),式中(x1,y1)和(x2,y2)是图中两个转折点的坐标。
 (7)
(7)
2.2基本形态变换消除图像噪声
利用滤波技术将含有噪声的图像进行处理,可以抑制我们不需要的信号,使图像更加满足我们的需求。一直以来,我们应用线性滤波器进行图像的消噪处理,但对于各种非加性高斯噪声的抑制效果并不理想。而基于数学形态学的非线性图像滤波处理方法,很好的解决了这一问题。
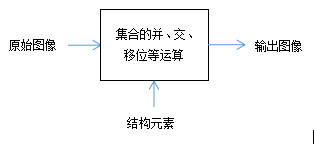
- 基本思想
数学形态学基本思想框图如图1所示,将具有一定形态的结构元素与集合的并、交、移位等运算结合起来,对原始图像进行处理,使输出的图像更加符合应用的需求。其中结构元素[10]定义为包含所利用的邻域的形状和大小的矩阵,该矩阵由0和1组成,1代表邻域内的像素,具有任意的大小和维数。数学形态学则仅对矩阵中1代表的区域进行处理。我们知道了数学形态学的基本思想后,可知在监测过程中获取的图像往往有噪声的干扰,对目标的检测很不友好,所以滤除噪声是图像处理的一个非常重要的环节。本文采用形态学噪声滤除器进行图像去噪。
|
图1 数学形态学框图 |
(2)形态操作表示
利用A表示输入图像[10],B表示加入的结构元素,a表示图像A中一个像素的坐标,b表示结构元素B中的一个像素的坐标,w表示B的对称集 中的一个像素的坐标,z=(z1,z2)表示坐标系中的一个点的坐标,c为a相对于z平移之后的坐标。
中的一个像素的坐标,z=(z1,z2)表示坐标系中的一个点的坐标,c为a相对于z平移之后的坐标。
剩余内容已隐藏,请支付后下载全文,论文总字数:13672字
相关图片展示:





该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

