论文总字数:21033字
摘 要
工业机器人技术是机器人控制过程中的必要部分,本文以南京埃斯顿ESTUN研发的ER16工业机器人为研究对象,对机器人的基础理论和运动学展开了理论研究,建立了机器人的动力学模型,并且通过使用PD控制器对机器人进行了仿真控制验证。
本文的主要研究内容有:
根据齐次坐标变换理论,以ER16机器人模型为研究对象,采用经典D-H法建立机器人的连杆坐标系,给出了ER16机器人的运动学正解通式,讨论了机器人的逆运动学特性,得到了机器人逆运动学的解析解。并在笛卡尔坐标系下使用基本插补算法为机器人空间直线和圆弧运动作了恰当的轨迹规划,为运动学的正逆解的验证提供了合适的轨迹曲线。
为了使机器人在工作过程中具有较好的动态性能,本文在机器人动力学模型和轨迹规划的基础上,研究了机器人的动力学特性。根据拉格朗日方程,结合机器人的结构参数,对机器人进行适当的简化,得到机器人的动力学模型。同时,本文利用机器人仿真控制集成平台OpenHRP,建立了ER16机器人的动力学仿真模型。并通过使用PD控制对ER16机器人进行控制,对动力学仿真控制结果进行了验证,分析了该控制器控制下的机器人性能指标。
最后,总结了工作过程中研究不完善和算法值得优化的地方,对机器人多种控制方法进行了分析。
关键词:六自由度工业机器人;运动学;动力学;仿真;OpenHRP;
THE KINEMATICS ANALYSIS AND DYNAMICS SIMULATION ANALYSIS STUDY OF SIX DEGREES OF FREEDOM OF INDUSTRIAL ROBOT
Abstract
Kinematics analysis and dynamic simulation analysis are essential in the Robot Control Technology. In this thesis, the ESTUN ER16 industrial robot was studied as the research object and we have engaged theoretical research about the basic theory and the kinematics of robot. After building the dynamical model of the robot, we did the dynamic simulation analysis study using the PD-Controller.
By using homogeneous coordinate transformation, we establish connecting rod coordinate department. And, the forward and inverse kinematics solutions are provided by the Analytic Method. And then, trajectory planning for the rectilinear motion is done by using the interpolation algorithm.
Based on the robot dynamics model and trajectory planning, this paper presents the study the dynamic characteristics of the robot. According to the Lagrange's dynamical equations, we can get the dynamical equations of the ER16. Using the OpenHRP, a robot control simulation, ER16 dynamics simulation model is established. And we analyzed the performance metrics of ER16 under control of a PD Controller.
KEYWORDS: six degrees of freedom of industrial robot, kinematics analysis, Dynamics simulation, OpenHRP .
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景和意义 1
1.2 课题研究现状 2
1.3 论文主要内容与组织结构 2
第2章 OpenHRP平台和ER16机器人简介 3
2.1 OpenHRP平台介绍 3
2.2 ER16工业机器人介绍 4
第3章 ER16机器人运动学分析 6
3.1 运动学模型的建立 6
3.1.1 齐次坐标变换 6
3.1.2 机器人位姿描述 7
3.1.3 机器人连杆坐标系的建立 7
3.1.4 连杆坐标系的变换 9
3.2 ER16工业机器人的运动学正解 10
3.3 ER16工业机器人运动学逆解 12
3.3.1 运动学逆解分析 12
3.3.2 用解析法求解运动学逆解 12
3.4 运动学正逆解验证 15
3.4.1 正运动学算法验证 15
3.4.2 逆运动学算法验证 17
第4章 机器人动力学建模及仿真分析 19
4.1 机器人动力学分析 19
4.1.1 机器人动力学方程 19
4.1.2 ER16机器人动力学模型 19
4.2 在OpenHRP中建立机器人动力学模型 22
4.3 机器人的PD控制 24
4.4 验证动力学仿真效果 25
4.4.1 直线段仿真分析 25
4.4.2 末端三角形轨迹运动仿真 27
第5章 总结与展望 30
5.1 课题主要完成的工作 30
5.1.1 完成功能 30
5.1.2 项目总结 30
5.1.3 不足分析 30
5.2 课题下一步工作展望 31
参考文献 32
致谢 34
绪论
本章介绍了工业工业机器人的现状以及研究意义,然后介绍了国内外机器人运动学和动力学仿真研究现状和现阶段存在的问题,最后阐述了论文的研究内容以及论文的章节安排。
课题研究背景和意义
继上世纪五六十年代,美国制造出第一台真正意义上的工业机器人以来,伴随着工业生产和科学技术的不断进步,工业机器人迅速发展,并且日益成为了现今工业生产的主导力量。而经过近五六十年的广泛应用,工业机器人现在正在不断改善着当今人类工业生产和日常生活的方式。工业机器人的普及,在保障工业产品质量,提高产品产量,保障工人人身安全,改善劳动环境,提高劳动生产率,减少原材料以及控制生产成本方面作用突出[2]。
工业机器人在自上世纪五十年代以来一直持续发展,现在已经充分应用在了很多领域中。在普遍的工业生产制造等行业中,诸如机械焊接加工、表面热处理、喷漆、毛培制造、组装装配、上下料检测等生产活动中,工业机器人的应用已经非常广泛了,甚至有取代人工的趋势[3]。而在其他如机械加工、电子电气、橡胶塑料工业、木材家具制造、食品工业等领域中,工业机器人也得到了很大的应用[4]。诸如弧焊机器人、点焊机器人、装配机器人、喷漆机器人及搬运机器人等工业机器人都已被大量应用在当今的工业生产中[5]。
在国外发达国家中,工业机器人已经有了很长时间的技术积累和工业使用经验,在机器人技术方面近乎成熟,自动化的工业生产线同时配备大量的工业机器人用于流水作业等,在降低发达国家工业产品的人力成本和提高产品可靠性方面可谓作用突出。
有一批著名的、具有较大影响力的工业机器人公司诸如瑞典ABB、日本FUNC、Yaskawa,德国的西门子、KUKA Roboter、美国American Robotics、S-T Robotics等,在这些工业发达地区已经成为了支柱性产业。根据外国专家的预测,机器人产业有可能将是继蒸汽机时代的火车、电气时代的汽车、信息化时代的计算机后出现的另一种新的大型高科技产业[6]。
中国作为当今世界工厂,目前面临着需要解决用工不足以及急需降低制造成本的问题,而工业机器人显然在这方面必然会有很大的产业发展的空间。我国每年在工业领域都会装备有大量的工业机器人,每年其装机量要占到约全世界的八分之一。自2009年以来,我国机器人市场一直持续快速增长,目前工业机器人市场份额已经要接近全球市场的1/5,同时,以教育,清扫等为代表的家庭服务型机器人也逐步进入了国内市场。一些相关科研机构和企业已经掌握了工业机器人操作的优化设计制造技术、工业机器人控制、驱动系统硬件设计技术、软件设计、运动学轨迹规划技术等,我国的工业机器人已经在世界机器人领域占有了一席之地。总体而言,我国的机器人应用前景还是非常乐观的。
因此,中国整个工业领域在工业机器人上的需求始终呈现不断增长的趋势,而且由于工业技术的需要,对于机器人的性能要求也是不断提高。工业机器人的运动学系统基本理论和技术,如运动学模型建立、运动学正逆解方程的求解、空间坐标内轨迹规划算法等的研究,会在根本上决定着一个工业机器人的基本性能。因此,对于工业机器人运动学的分析和对运动系统的研究以及对于动力学仿真的验证是具有较大的实际意义的。
课题研究现状
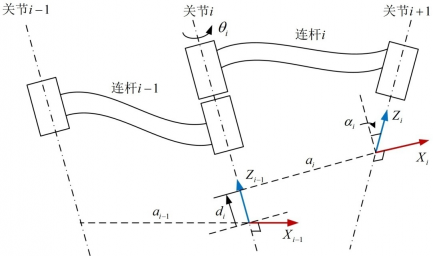
机器人运动学研究的问题是机器人末端工作点在空间中的运动变化情况即位姿与各个关节运动情况之间的关系。 ER16机器人的整体机械臂可以看做是六个旋转关节将对应的六个连杆连接起来。为了描述这些连杆的相对位置和姿态有几种研究方法。有以通过空间立体几何为基础的图解法,也有齐次变换、矢量分析和旋转法。本文中使用齐次变换矩阵法来对机器人运动学进行分析。
齐次变换法是将机器人各个关节和连杆之间的运动,通过建立坐标系和对应的数学模型,将空间中的位置关系运算转化为矩阵解析计算。D-H矩阵法是根据关节的旋转角度为单变量,通过相应的参数计算来确定相邻连杆之间的齐次变换矩阵,这种方法简明易懂,是机器人运动学正逆解计算的一种常用方法;机器人动力学则是物理动力学与机器人学的交叉学科,主要的研究方法有牛顿-欧拉算法、拉格朗日方程法、凯恩动力学法等。本文使用拉格朗日方程法对机器人动力学进行分析计算[15]。
论文主要内容与组织结构
论文的各个章节内容安排如下:
第一章:本章主要介绍了工业机器人的发展和现今工业机器人的应用现状,然后对机器人运动学进行了简要介绍,最后部分给出了论文的章节安排和各章中的主要内容。
第二章:介绍了仿真机器人控制平台OpenHRP,对ER16工业机器人的基本特性和参数进行了分析。
第三章:本章介绍了机器人学的基本理论知识,建立了机器人的D-H连杆坐标系,求出了机器人的运动学和动力学方程,用解析法计算了机器人的正解和逆解。最后在笛卡尔坐标中对直线和圆弧轨迹进行了规划。
第四章:本章在运动学分析基础上进行动力学分析,在OpenHRP平台下建立了机器人的动力学模型,并验证了仿真效果。设计了机器人的PD控制器并对机器人进行控制和验证。
第五章:总结本课题的主要工作和完成情况,对本课题的不足之处和值得改进和研究的领域进行了展望。
OpenHRP平台和ER16机器人简介
OpenHRP平台介绍
OpenHRP是日本学者Hirohisa Hirukawa等人在2004年开发的仿人形机器人仿真控制平台[12]。OpenHRP是基于多个CORBA服务器的一个分布式对象系统,它能够使用其他语言在控制器上对机器人运动进行操作。这个系统可以在主流操作系统如WindowsXP/7和Linux上运行,每个单独的CORBA服务器包括有接口部分、语言接口部分和核心逻辑部分,还有本地接口和非实时使用接口;控制器可以与模拟器,包括参数解析器、运动学和动力学的计算器和碰撞检测器共享大量的软件[12],这种结构体系能够大大提高系统的开发效率[16]。图2.1即为OpenHRP集成仿真环境。
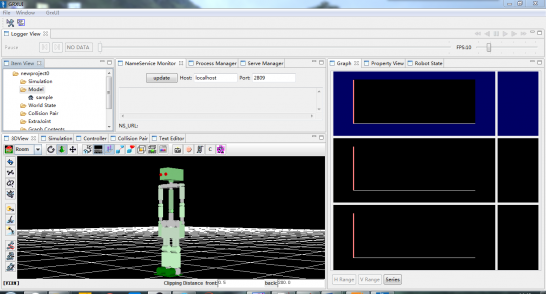
win7下的OpenHRP集成仿真环境
OpenHRP 的动态模拟器由五种 CORBA 服务器组成,这些服务器可分发和并行执行。
每个服务器可以由其他拥有 IDL 定义的相同接口的实现方法代替。通过 CORBA 的语言无关功能,模拟控制器和浏览服务器可以使用Java 和 Java3D来实现,其他服务器使用 c 来实现。每个服务器的功能如下所示。
模型解析器:此服务器加载VRML 文件,用来描述几何模型和机器人的动力学参数和他们的工作环境,并向其他服务器提供这些数据。
碰撞检测器:视察三角形的两个集之间的干扰,并发现位置、法线向量和每个交点的深度。为了这个目的已经增强了快速性。
动力学服务器:计算机器人正动力学。
控制器:此服务器是通常由OpenHRP用户开发的机器人的控制器。
浏览服务器:由三维 (3D) 图形可视化仿真结果,并记录[15]。
ER16工业机器人介绍
ER16工业机器人主体有六个运动自由度,其中腕部有1~3个运动自由度,主要控制末端工作点的朝向;另外三个运动自由度主要控制末端工作点的位置。
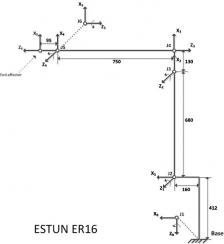
ER16机器人可按给定轨迹运动,可用于连续焊接,点焊等重复性和较高精度要求的工作。它是一个六轴垂直纯转动关节的工业机器人,各个轴的转动方向如图2.2所示。
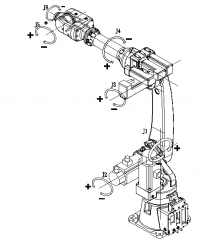
ESTUN ER16机器人各轴转动方向
它在OpenHRP仿真平台下的三维仿真模型如图2.3所示。
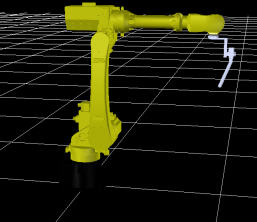
OpenHRP下ER16机器人三维仿真模型
剩余内容已隐藏,请支付后下载全文,论文总字数:21033字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

