论文总字数:27472字
摘 要
本次毕业设计完成轮椅助行康复机器人控制系统的设计,完成了系统的软硬件设计,灵活控制轮椅助行康复机器人运行,并使用了多种控制方式。
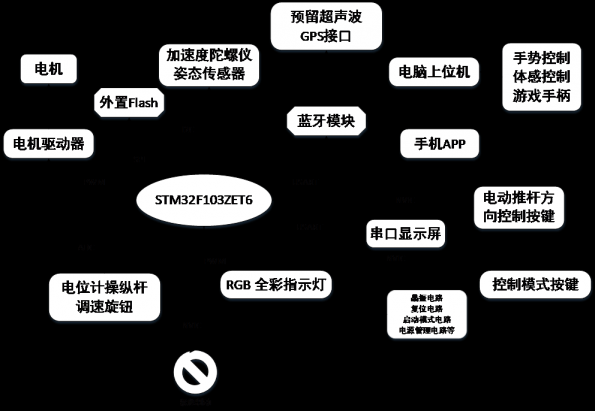
在硬件设计方面,采用STM32为主控核心,外扩三轴加速度计三轴陀螺仪MPU6050传感器和地磁计HMC5983,预留GPS,超声波等传感器等接口。在运动控制方面,通过轮椅助行康复机器人运动学分析,建立控制模型,得出其控制算法,通过四元数转欧拉角拓展卡尔曼滤波算法等进行数据融合演算计算轮椅助行康复机器人的3D姿态同时获取速度进行闭环PID控制,提高了控制精度。在软件系统方面,设计注重界面的设计,编写了手机,电脑上位机,下位机串口屏界面,实现基本的通信,波形显示,数据分析,参数设置,参数调节,电量检测,硬件测试,3D状态显示,遇故障自动短信通知,地图导航等功能。在人机接口方面,采用了四维电位计摇杆控制,下位机串口屏虚拟界面控制,电脑上位机控制,游戏手柄控制,LEAP MOTION体感传感器体感控制,MYO手势控制,手机应用程序控制,手机语音控制八种控制方式,可以应用于不同的场合,使有更好的体验。同时本设计通过编写手机APP进行路径规划和地图导航,增强轮椅康复机器人的自主性能。
关键词: 智能轮椅 康复助行机器人 控制系统
Abstract
This thesis is to finish the design of the control system of the wheelchair walker rehabilitation robot and the design of the software and hardware of the system. At the same time, it makes use of a variety of control modes to control the operation of the wheelchair walker rehabilitation robot flexibly.
In the hardware design, the STM32 is used as the main control center. It externally expands triaxial accelerometer three-axis gyroscope and geomagnetic sensor MPU6050 meter HMC5983 and reserves GPS, ultrasonic sensors and other connectors. In the motion control, the wheelchair walker rehabilitation robot kinesiology is used to analyze and build the control modes and get the control algorithm. The method ‘quaternions to Euler Angle extend Kalman filtering algorithm’ is used to conduct the data fusion calculation, calculate the 3D gesture of the wheelchair walker Rehabilitation Robot, get speed to conduct the control of closed-loop PID and improve the control accuracy. In the software system, the design mainly emphasizes the design of interface. It writes the interface of the mobile phone, computer PC and the next serial port screen, which realizes the basic communication, waveform display, data analysis, parameter setting, parameter adjustment, power testing, hardware testing, 3D state display, automatic SMS notification in case of fault, map navigation and other functions. In the man-machine interface, it uses a four-dimensional potentiometer joystick control, lower machine serial-screen virtual interface control, computer PC control, game pad control, LEAP MOTION somatosensory sensor motion control, MYO gesture control, mobile application control and mobile voice control. These eight means of control can be used in different situations so that there will be a better experience. At the same time the design enhances the autonomic performance of the wheelchair rehabilitation robot by writing phone APP to conduct route planning and map navigation.
Keywords: intelligent wheelchair Rehabilitation walker robot control system
目录
摘 要 I
Abstract II
第一章 绪论 1
1.1引言 1
1.2轮椅助行康复机器人国内外研究现状,关键技术及发展趋势 1
A. 国内外研究现状及关键技术 1
1.3 设计任务与工作 4
第二章 硬件系统的设计 5
2.1硬件系统总体结构 5
2.2硬件系统的需求分析及硬件选型 5
2.2.1电机选型 5
2.2.2 电机驱动器 6
2.2.3 电源选型 6
2.3硬件电路设计 6
2.3.1 硬件电路需求分析 6
2.3.2 硬件电路设计 7
2.3 PCB设计 11
第三章 软件系统的设计 13
3.1上位机软件系统总体结构 13
3.2电脑上位机设计 13
3.2.1 电脑上位机开发环境介绍 13
3.2.2 功能需求 14
3.3 手机上位机设计 17
3.3.1 手机上位机开发环境介绍 17
3.3.2 APP应用程序设计 17
3.4 下位机串口TFT显示屏设计 20
第四章 算法分析与控制实现 22
4.1下位机主程序流程图 22
4.2 建模与运动控制算法分析 22
4.3 MPU6050姿态融合演算算法——四元数转欧拉角及卡尔曼滤波算法 25
4.4 LEAP MOTION体感控制 28
4.5 MYO手势控制 29
4.6 地图导航 30
第五章 轮椅底架结构设计 32
5.1底架设计 32
5.2控制盒的设计 33
第六章 实物与演示 34
6.1实物图 34
6.2操纵控制 35
参考文献: 37
- 绪论
1.1引言
轮椅助行康复机器人控制系统设计分为机械结构的设计,硬件系统的设计以及软件系统的设计,对稳定性,灵活性以,舒适性和智能性以及多种控制方案方面进行分析。在机械结构方面,轮椅助行康复机器人的设计主要针对下肢偏瘫的患者,为配合一体机的总体设计,要求智能轮椅具有结构简便,并能方便地辅助使用者在坐姿与站姿两种状态间切换,助行机构需要模拟人走路姿态,可帮助人进行正常步态训练。在运动控制方面,电机的控制需要使患者从坐姿到站姿的变化有平稳的过渡。同时,该轮椅由两轮差速控制,轮椅的运动应该能够配合行走训练的步速。人机接口方面,用户在使用智能轮椅过程中需要不断地与机器人沟通,人机接口的灵活、简便易用是智能轮椅高效运行的基础。系统的集成与通信技术方面,轮椅在使用过程中需要不断的对外部环境进行分析,对自身所处的状态进行调整。
1.2轮椅助行康复机器人国内外研究现状,关键技术及发展趋势
A. 国内外研究现状及关键技术
从1986年英国研制出第一辆轮椅助行康复机器人以来,很多国家开始投入大量资金进行研究。纵观国外在这方面的研究,其关键技术主要涉及有:系统的模块化,灵活性,注重人机界面的开发,让用户能更容易的控制,多种控制方式相结合,增强轮椅的自主性能,通过多传感器相结合,比如加速度,陀螺仪,地磁计,GPS,超声波,红外,机器人视觉等,感知外部环境,判断患者的意图并且帮助其实现,为简化控制,有的机器人可以设置导航功能等。相比国外,国内轮椅助行康复机器人的研究起步相对比较慢,就目前来说,与国外先进水平还有很大的差距,主要在机构的复杂性和控制的灵活性方面差距相对比较大。最早期对轮椅康复机器人的研究主要是简单的运动,也就是电动轮椅的研究,电动轮椅主要是为患者代步,针对康复治疗的效果比较少,电动轮椅所涉及的方面也相对比较少,大都数就是调节速度,有的设有避障等功能,在舒适性和稳定性方面有很大的不足。随着技术的进步,在人类运动学分析上成果的显著提高上,机器的控制越来越智能,其自主性智能性方面皆有很大的提高,各种先进的理论以及算法融合到控制中,是康复机器人更加的稳定和灵活,比如人工神经网络算法,贝叶斯估计,卡尔曼滤波算法,高斯牛顿算法等,通过数学模型的建立完整对的反映出外面环境以及自身姿态,利用控制算法进行路径规划提高导航精度等,同时也设计语音识别以及机器人视觉,手势控制等方面。国外比较有名的项目有美国麻省理工学院WHEELESLEY项目,加拿大AAI公司TAO项目,欧盟TIDE项目等,国内研究相对比较先进的有我国863智能机器人智能轮椅项目及第三军医大学外科研究所项目等[1]。
1989年法国开始研究VAHM项目[4],第一阶段的智能轮椅由轮椅、PC486、超声波传感器、人机界面和一个可匹配用户身体能力转换的图形屏幕组成,设置为手动、自动、半自动三种模式,手动时轮椅执行用户具体指令和行动任务;自动状态用户只需选定目标,轮椅控制整个系统,此模式需要高度的可靠性;半自动模式下用户与轮椅分享控制。为了更好适应用户需求,研究者在康复中心进行了一系列调查,得出结论:系统必须是多功能的,不仅应适应残障人士的生理和认知能力,也应适应环境的结构和形态。在此基础上,经改进研制出第二代产品(如图1-1),相对于第一代产品,其功能更丰富,面向用户范围更广,性价比更好,改良了大量控制。
西班牙SIAMO[5]始于1996年,由ONCE基金会资助,目标是根据用户的残障程度及特殊需求建造多功能系统。为达到要求,特别研究了系统的模块化和灵活性,设计了分布式构架,也着重开发了人机界面,使用户更易于控制轮椅。项目第一个成果是一个轮椅原型(如图1-2),其中电子系统完全由ALCALA大学电子系开发,包括运动和驾驶控制(低级控制)、基于语音的人机界面、操纵杆、由超声波和红外传感器组成的感知系统(高级控制),轮椅可以探测障碍及突发不平地带。随着项目的发展,整个系统包括一个完整的环境感知及综合子系统、一个高级决策导航与控制子系统和人机界面三个部分,人机界面有五种方式呼吸驱动、用户独有语音识别、头部运动、眼电法及智能操作杆,大大增加了用户与轮椅交互的方式,使轮椅的功能更为丰富,而模块化保证了将来产品商业化更为容易。


图1-1 法国VAHM项目 图1-2 西班牙SIAMO项目
德国乌尔姆大学在一个商业轮椅基础上研制了轮椅机器人MAID[8](如图1-3),在乌尔姆市中心车站的客流高峰期及1998年汉诺威工业商品博览会的展览大厅环境中进行了实地现场表演。该轮椅机器人在公共场所拥挤有大量乘客的环境中,进行了超过36小时的考验,能够自动识别和判断出行驶的前方是否有行人挡路,或是否可能出现行驶不通的情况,自动采取绕行动作,它甚至还能够提醒挡路的行人让开道路。根据航行的环境不同,机器运行模式分为: NAN(狭窄区域航行)和WAN(宽区域航行),大大增加了航行准确率。此项目得到德国科学技术部的财政支持,据计划,这种智能轮椅将于两年后正式面世,价格会比普通电动轮椅高出约50%。
麻省理工智能实验室的智能轮椅威尔斯利[18](如图1-4),为一半自主式机器人轮椅,配备有计算机控制和传感器的电动轮椅,还装有一个Macintosh笔记本电脑用于人机界面交互,其硬件是从KISS学院买来用于机器人实践。系统有两种级别的控制:高级方向指令和低级计算机控制路线,用户拥有最高控制级别。系统由两部分组成,智能轮椅系统提供低级控制,避障和保证正确的运动方向;用户和轮椅之间的人机界面提供高级控制。这个智能轮椅允许用户通过三种方式来进行控制:菜单、操纵杆和用户界面。菜单模式下,轮椅的操作类似一般的电动轮椅。在操纵杆模式下,用户通过操纵杆发出方向命令来避障。用户界面模式下,用户和机器之间仅需通过用户眼睛运动来控制轮椅,即用鹰眼系统来进行驱动。该轮椅在国际联合会的


剩余内容已隐藏,请支付后下载全文,论文总字数:27472字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

