论文总字数:18368字
目 录
1绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 1
2光学测量方法论证 2
2.1激光三角法直射测量原理 2
2.2激光三角法斜射测量原理 3
3角度测量方法及计算模型 4
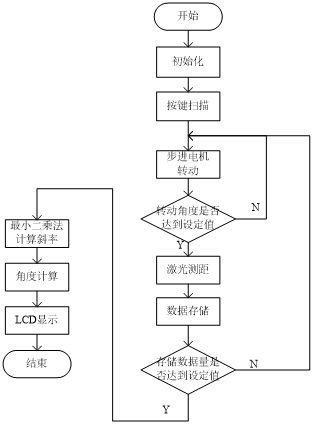
4系统框图 7
5硬件电路设计 8
5.1单片机模块 8
5.2激光测距硬件模块 9
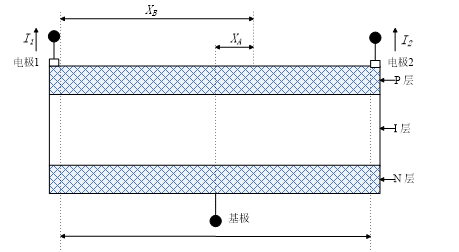
5.2.1PSD基本原理、特点 9
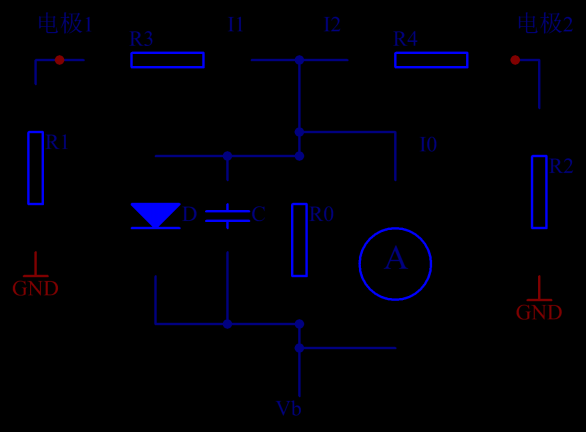
5.2.2非线性补偿电路[24] 12
5.3 A/D转换 13
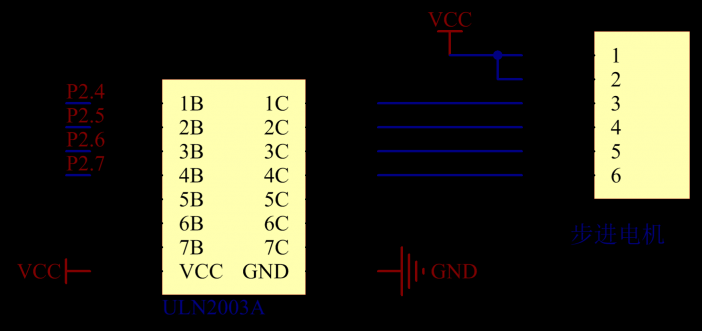
5.4步进电机 15
5.5 LCD12864显示 15
5.6矩阵键盘 16
6软件设计 17
7精度分析 17
7.1 PSD激光测距精度 17
7.2步进电机定位精度 18
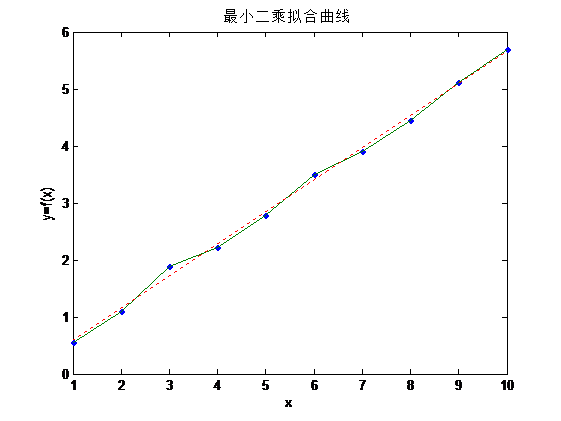
7.3 MATLAB测量精度分析 18
结论 19
参考文献 19
致谢 21
基于PSD的角度测量系统设计
黄丹丹
,China
Abstract:Based on the PSD position sensitive detector, a new angle measuring system is designed by using the laser triangulation method. The system design uses the low power consumption MSP430F169 as the main control chip, through the stepping motor rail system to drive the distance measuring module movement different distance, respectively, by the PSD position sensor measure the measured surface corresponding distance, obtains in the two-dimensional coordinate system is measured The coordinates of several points on the surface, using the least squares fitting to calculate the linear equation, using the established mathematical model to calculate the object angle. The system achieves the angle of high precision, automated measurement, has important practical significance.
Key words:angle measurement;laser triangulation;single chip microcomputer;least squares fitting
1绪论
1.1研究背景及意义
在工程测量领域,几何量的测量占有十分重要的地位,尤其是对各种零件的形状、尺寸的测量。只有通过精确的测量过程,在现代工业企业生产中才能制造出精密的零件,保证生产符合要求,实现零件生产的可靠性。角度测量作为科学测量的一个重要组成部分,尤其是小角度的测量在仪器精密加工、航空航天、军事发展和通讯设备等众多领域具有重要作用及意义[1]。
随着现代科技技术的高速发展,精密加工已不足以满足当前的生产制造要求,生产制造业对制造环节提出了更高的要求,逐步迈向超精密[2]加工时期。同时为满足制造生产过程中的需要,近年来,随着激光光源、光电材料与器件的发展,角度测量越来越倾向于采用光学方法测量,测量技术也逐步从精密测量时代发展到超精密[3]测量时代。与机械式和电磁式测量方法相比光学测角法具有更高的测量精度,更易实现测量过程的自动化。角度的测量已不仅仅是作为一个参数的测量,在高精度的测量领域中,是科技力量以及国防实力的一种体现,各个国家相继发展出多种测角技术,其中以光学测量法作为主流不断提高精度,使得光学测角技术成为高精度测角技术的主要发展方向。
在航天和国防科研等领域高精度角度测量技术占有十分重要的地位。航空航天及国防工业的飞速发展,带动了一系列相关科研领域的进步,同时,对角度测量技术手段和测量精度提出了更高的要求。
因此,设计一种测量精度高、应用范围广的自动角度测量系统具有重要的实际意义和参考价值。
1.2国内外研究现状
目前角度测量可以划分为两大类,即接触式测量和非接触式测量。接触式测量是指测量仪器与被测物体表面的某一个点直接接触进行测量,或沿着物体表面进行扫描,通过在短时间内高密度地获得的大量数据,正确描绘出被测物体的形状参数,测量的点数越多,测量结果越精确。接触式测量方法的主要代表为三坐标机测量;非接触式测量则是不与工件表面有直接接触,因此具有显著的优点,如:测量速度快,避兔对被测物的损伤等。目前,随着科学生产特别是电子计算机和激光技术的高速发展,越来越多的工业生产过程中需要角度测量系统的参与,这促使角度测量技术的不断更新与发展,扩大角度测量的应用范围,同时对角度测量的精度与自动化提出了更高要求。据不完全统计,角度测量根据测量原理划分可以细分为16类[4],经过30年的发展,不但测量精度大大提高,自动化水平也逐步提升。
按照测量原理分角度测量可以分为三大类:机械式测角法、电磁式测角法和光学测角法。机械式角度测量装置及电磁式角度测量装置是角度测量技术中最先发展起来的技术。机械式的测量方式主要以多齿分度盘为代表,多齿分度盘测量角度精度比较高,但是由于多齿盘的齿数不能无限地增多,目前的研究进展表明最大分度误差达到0. 2秒,最小分度间隔为2秒;而圆磁栅测量技术则是电磁测角[5]技术的代表,但在实际使用机械式与电磁式测角技术的方法大多是使用手工操作,在生产实践中不利于自动化的实现。
光学测角方法与传统的角度测量方法相比,不但具有非接触式测量的优点,同时还具有测量精度高、速度快等多方面的优点,因此光学测角方法[6]是目前最受关注的测量方法。尤其是随着稳定的激光光源的发展,光学角度测量方法的应用越来越广泛。目前为止,角度测量的光学方法主要有圆光栅测量法、光电自准直法、激光干涉法[7]、光学内反射法[8]、牛顿环法[9]、环形激光器法[10]、光电编码盘[11]等方法。
2光学测量方法论证
在进行角度测量的过程中,由于角度这个物理量一般无法直接测量,当物体角度发生变化时,其直观的变化反映在与已知直线夹角的变化,而夹角的变化与三角函数密切相关。三角函数可以看做是距离的函数,所以可以通过测量物体距离的变化间接实现角度的测量与计算。
激光三角法是指由半导体激光器发射的激光光束在经过被测物体表面的反射后,由于入射光与反射光之间构成了一个几何三角形而命名[12],是应用较为广泛的一种非接触式光学测量方法。其除具有光学测量方法的一般优势外,还具有结构简单、测量速度快、精度高、材料适应性广等优点,特别是在三维轮廓、厚度、宽度及位移测量方面得到明显展现。在实际工业生产过程中,为进一步简化系统结构,拓宽应用范围,利用激光三角法设计的测量系统得到不断地完善与发展。激光三角法主要原理为通过激光器将激光光束按照某一角度投射到被测面,根据光学反射原理,利用成像透镜将反射光进行汇聚,并在位置传感器PSD上形成物像光斑。当被测物体表面的位置沿着激光方向发生改变时,反射光的角度及反射光汇聚后的光斑在PSD光敏面上的位置也将随之发生改变[13]。在实际应用中,通过对光敏面上光斑移动距离与物体实际移动距离的关系的研究,确定两者之间一一对应的关系,根据这种关系建立关系式,在实际测量中即可根据光斑移动距离和关系式计算出物体对应的移动距离。在激光三角法中按照入射光与被测物体表面的夹角不同分为直射式与斜射式[14],在不同的结构下,位移计算公式也不同。
2.1激光三角法直射测量原理
激光三角直射式光路图[15]如图2-1所示,激光器将光束投射到被测物体表面,经物体表面反射后,将漫反射光通过透镜汇聚到光敏面上形成光斑。图中O点为被测物初始位置原点,A点与B点均为物体移动后位置点,O'点、A'点、B'点为相对应的像点;BOb垂直于OM,B'Ob'垂直于MO';M为成像透镜L的中点,焦距为f;设OM之间的距离为d0,MO'之间的距离为di,入射光与漫反射光夹角∠BOM为γ,PSD成像面与成像透镜光轴夹角为γ';Z为物体纵向入射光与漫反射光夹角∠BOM为γ,PSD成像面与成像透镜光轴夹角为γ';Z为物体纵向方向移动距离,I为对应光斑在光敏面上的移动距离。设物点O与其对应像点O'均在成像透镜L的主轴上。当入射光随被测物体由O点运动到B点时,根据成像原理其像点也移动到B'点。
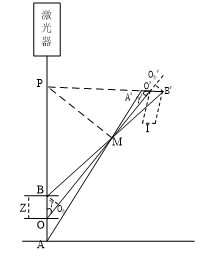
图 2-1 激光三角直射式光路图
连接并延长像点O'B',与激光光轴相交于P点。如图2-1所示,可知:
 ,
, (2-1)
(2-1)
根据三角形ΔBObM相似于ΔB'Ob'M得:
 即
即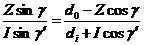 (2-2)
(2-2)
推导得:
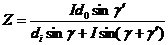 (2-3)
(2-3)
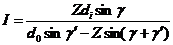 (2-4)
(2-4)
剩余内容已隐藏,请支付后下载全文,论文总字数:18368字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

