论文总字数:12148字
目 录
1.引言 1
1.1对流层水汽场在气象上的应用 1
1.2大气水汽常规探测手段 1
1.3 地基GPS气象学的重要性 1
1.4 本文研究内容 1
2.地基GPS技术解算水汽原理 2
2.1地基GPS测量天顶方向大气可降水总量 2
2.2地基GPS測量倾斜路径可降水总量 2
2.3地基GPS三维水汽层析算法 3
3. 现有层析方程组解算技术 6
3.1最小二乘法 6
3.2奇异值分解法 7
3.3 滤波层析方法 7
滤波层析方法 7
3.4 代数重构技术 8
4. 实例解算 9
4.1 数据和方法 10
4.2 结果分析 12
5. 总结与展望 15
1.引言
1.1对流层水汽场在气象上的应用
水汽是大气中的一种主要成分,在大气的化学变化、物理变化过程中起着十分重要的作用。水汽作为大气中变化最大的一种气体,分布不均匀,时间变化大。其变化是引起天气变化、气候变换的主要原因,对全球气候变化起着重要的作用。如何精确量测水汽的空间分布和时间变化是目前气象学所需要研究的重要课题之一。
1.2大气水汽常规探测手段
大气中有很多因素能够影响水汽的分布和变化,由于探测技术发展还不完善,精确测定大气湿度是十分困难的。因此我们对水汽的研究还很局限,利用前沿技术准确测定水汽含量是当前气象学所需研究的重要任务之一。目前,大气水汽常规探测手段主要有以下几种:气象卫星观测、无线电探空、激光探测技术、水汽辐射计、飞机探测、太阳光谱分析仪、气象雷达观测、地面湿度计观测[1]。
1.3 地基GPS技术的重要性
地基GPS技术是根据地面GPS观测站的资料和数据,利用平差计算,得到测站天顶延迟量。天顶延迟包含了干延迟和湿延迟两种,干延迟的特点是变化规律,易于建模,相反湿延迟没有明显的变化规律,很难通过地面GPS观测站的观测数据来准确建立模型,所以一般情况下湿延迟可以利用总延迟和干延迟的差值来准确获取,求得湿延迟后即可进一步求得大气中的水汽含量和可降水量[2]。
与上文所提及的一些手段相比,地基 GPS 技术的优点主要体现在以下几点:
1)测量精度高。
2)不受云雨影响,可全天候观测。
3)时空分辨率高。
4)成本低,维护简单。
1.4 本文研究内容
本论文主要研究利用地基GPS技术高精度地获得可降水量 PWV(Precipitable Water Vapor)、GPS斜路径水汽 SWV (Slant Water vapor)、GPS水汽层析(Tomography)等原理和方法,比较分析最小二乘法,奇异值分解法,卡尔曼滤波法和代数重构技术等四种水汽层析方法,并以深圳香港GNSS实验网为例,利用一般代数重构技术和乘法代数重构技术实现四维水汽场重构。
2.地基GPS技术解算水汽原理
2.1地基GPS测量天顶方向大气可降水总量
利用地基GPS资料来测量天顶方向大气可降水总量PWV的主要步骤如下:
- 使用GAMIT或Bernese软件解算观测文件和卫星文件,直接得到天顶总延迟ZTD;
- 使用Saastamoinen模型模型,利用本地的地面气压、温度等资料,得到天顶干延迟ZHD,公式如下:
 (2.1)
(2.1)
式中,ZHD的单位是cm,Ts指地面温度(单位是K),Ps指地面气压(单位是hPa),  指测站纬度(单位是弧度), H为测站的海拔高度(单位是km),下标S代表Saastamoinen 模型。
指测站纬度(单位是弧度), H为测站的海拔高度(单位是km),下标S代表Saastamoinen 模型。
- 天顶湿延迟ZWD等于ZTD减去ZHD,将ZWD乘上一个转换系数
 可以得到大气可降水量PWV 即:
可以得到大气可降水量PWV 即:
 (2.2)
(2.2)
转换系数 的值与
的值与 (大气加权平均温度)的大小有关[4],
(大气加权平均温度)的大小有关[4], 和
和 的求法本文不做具体研究,一般取转换系数
的求法本文不做具体研究,一般取转换系数 =0.15。
=0.15。
2.2地基GPS測量倾斜路径可降水总量
GPS信号在穿过接收机和卫星之间时,很容易受到对流层中各种因素的影响,尤其是大气对信号的折射作用,这样,信号就会产生或多或少的延迟。这种延迟可以分为SHD和SWD(斜路径干延迟和斜路径湿延迟)两项。卫星高度角越低,GPS信号所经过的路径就会越长,通过建立投影变换可以将天顶总延迟和斜路径总延迟联系起来,所以SHD可通过ZHD以及干映射函数 求得, SWD可通过ZWD与湿映射函数
求得, SWD可通过ZWD与湿映射函数 求得粗估值[3]。GPS卫星和接收机天线之间的湿折射率的积分即为SWD:
求得粗估值[3]。GPS卫星和接收机天线之间的湿折射率的积分即为SWD:
 (2.3)
(2.3)
 指倾斜路径湿延迟, s指积分路径, sat指GPS卫星, ant指接收机天线,湿折射度
指倾斜路径湿延迟, s指积分路径, sat指GPS卫星, ant指接收机天线,湿折射度 为水汽压
为水汽压 及温度
及温度 的函数:
的函数:
 (2.4)
(2.4)
常数
GPS信号传播路径方向上积分水汽量的等效液水高度即为SWV:
 (2.5)
(2.5)
 指倾斜路径方向上的水汽总量,
指倾斜路径方向上的水汽总量, 指水汽密度,
指水汽密度, 指液水密度。
指液水密度。
结合理想气体状态方程,可以得到与的关系如下:
 (2.4)
(2.4)
以上方法所得到的SWD为粗差值,只能够表明水汽在水平方向的分布信息,还需要考虑水汽的非均匀特征以获取高精度的SWD值,关键是处理好残差项[5]。想要得到GPS信号路径方向上的水汽总量,可以通过解算GPS观测方程,得到湿延迟,再乘以 因子,此方法时空分辨率高,可以得到与GPS数据采样频率一致的水汽分辨率,但是这种方法对于接收机钟和卫星钟的估算精度要求很高。
因子,此方法时空分辨率高,可以得到与GPS数据采样频率一致的水汽分辨率,但是这种方法对于接收机钟和卫星钟的估算精度要求很高。
2.3地基GPS三维水汽层析算法
2.3.1 层析大气水汽技术的原理
三维水汽数据能够更准确地描述强天气发生发展的水汽情况,对天气分析预警和数值天气预报有着重要的作用。利用地面接收站与GPS卫星间的解算结果,运用层析技术可以得到水汽的三维分布[6]。
首先在垂直和水平方向上将GPS观测网与对流层顶之间的大气划分成若干格网,未知待求量为水汽在单位网格中的密度。假设单位时间内(如lh)每个网格中的水汽是一个常数,且空间分布十分均匀,则观测路径上的水汽总含量可以分配到一条射线所穿过的每个格网中,格网内的分段水汽与斜路径水汽量总量关系可表示为:
 (2.5)
(2.5)
试中: 指射线S所穿过的第
指射线S所穿过的第 个格网的长度,
个格网的长度,  指第S个射线路径上的水汽总量,
指第S个射线路径上的水汽总量, 指水汽密度[7]。在一段时间内,能够产生大量的如上所示的观测方程,当方程组闭合时,就有可能解出方程组,得到每个格网的水汽密度。
指水汽密度[7]。在一段时间内,能够产生大量的如上所示的观测方程,当方程组闭合时,就有可能解出方程组,得到每个格网的水汽密度。
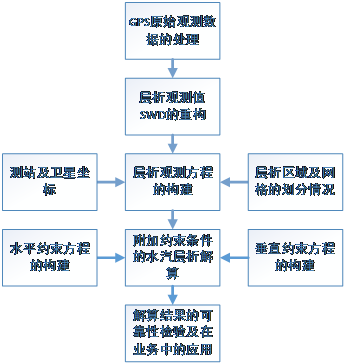
图1 GPS三维水汽层析技术流程图
2.3.2 建立GPS层析观测方程组
如下图所示,有一条信号S从卫星射向接收机,期间穿过格网A和B,L1指信号在格网A中走过的距离,L2指信号在B中走过的距离,则A和B两个网格内水汽量之和就是第S条信号路径上总的水汽量。如下表示:
 (2.6)
(2.6)
式(2.6)中, 代表路径S上的水汽总量,为已知量;X1指A网格内的水汽值,X2指B网格内的水汽值,为未知量。
代表路径S上的水汽总量,为已知量;X1指A网格内的水汽值,X2指B网格内的水汽值,为未知量。
剩余内容已隐藏,请支付后下载全文,论文总字数:12148字
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

