论文总字数:31753字
目 录
1 引言 1
1.1 研究目的和意义 1
1.2 LIDAR滤波的国内外研究现状 2
1.3 本章技术路线图 2
2 LIDAR技术背景 3
2.1 车载LIDAR技术 3
2.2 LIDAR数据特点 4
3 空间体元地形滤波算法 5
3.1空间体元与基于空间体元的滤波............................................5
3.2 算法描述 6
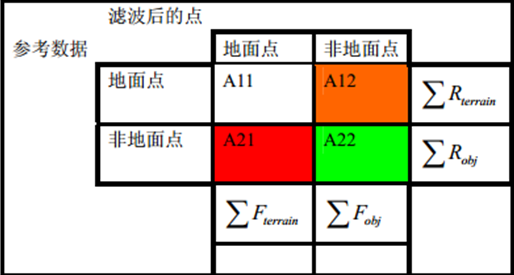
3.3 精度评价方法 8
4 数据描述 8
5 精度分析实验 9
5.1 滤波结果图 11
5.2算法参数实验 13
5.2.1 以MLSD-1 数据集为实验元 13
5.2.2 以MLSD-2 数据集为实验元 15
5.2.3 以MLSD-3 数据集为实验元 17
5.2.4 以MLSD-4 数据集为实验元 19
5.3参数敏感性分析.........................................................21
5.3.1改变各参数对I型误差的影响..........................................22
5.3.2改变各参数对II型误差的影响.........................................24
5.4计算复杂度 27
6 全文总结与展望 30
参考文献.................................................31
致 谢 33
基于车载LIDAR数据的地形提取精度分析
刘琪馨
, China
Abstract:In this paper, we discuss a terrain filtering algorithm based on spatial voxel. Firstly, on the basis of reading the relevant reference documents, we use the knowledge of remote sensing to analyze the characteristics of vehicle LIDAR data. According to the vehicle LIDAR data of the given research area, And then use the reference data to construct the error matrix, calculate a kind of error and two kinds of errors which describe the accuracy of the filter. Finally, through the experiments of different experimental areas, the sensitivity of the filter parameters is analyzed.
Key words:Vehicle LIDAR; Filter; Error; Accuracy Analysis
- 引言
- 研究目的和意义
车载LIDAR技术作为一种新兴的对地观测技术,因高效的工作效率正在受到国内外越来越多的关注,同时也为测绘行业快速获取大范围的地形数据提供了一种可靠的作业方法。当前国内外对于LIDAR技术的研究已经跨越了最初的硬件方面的研究,主要针对LIDAR数据的相关数据处理进行研究。LIDAR点云数据中有着非常丰富的地理信息,但是要获得这些信息需要使用有效的方法进行数据处理。在实际研究工作中,仪器能够接收目标的反射从而得到数字表面模型(DSM),但是在数字表面模型中,除了有我们需要的地面点之外,还包含建筑、树木、桥梁、车辆等信息的非地面点,数字高程模型(DEM)的提取必须剔除这些非地面点,获取真实的DEM,这一过程与图像噪声去除的方法非常相近,我们称为“滤波”。因此,由原始的LIDAR点云数据高效、精确而且快速地获得准确的地形数据是当前一项非常重要的研究课题。
- LIDAR滤波的国内外现状
随着激光雷达系统在各行各业的不断应用,对激光雷达数据处理软件的需求越来越迫切。 目前,有很多商业公司和各种研究机构研究相关算法。关于激光雷达数据处理的研究主要集中在原始LIDAR点云的过滤和分类上。目前的一些过滤方法有一定的缺点,不能适用于各种不同的地形情况下的点云滤波的分类(张小红,2007)。德国的学者Lindenberger率先采用了一种数学形态学的方法对LIDAR数据进行滤波,利用数学形态学的方法对LIDAR数据进行开运算(LindenbergerJ,1993)。K.Kraus和N.Pfeifer等奥地利维也纳大学的学者提出了一种使用迭代线性最小二乘插值法进行滤波的算法。此方法是在线性最小二乘内插后对所得到的每个脚点残差值赋予一定的权值,并且进行下一步的迭代,最终分离出地面点和非地面点(K.Kraus,等1998)。德国TopScan公司开发出的软件采用的是使用移动窗口的方法对LIDAR的点云数据进行滤波处理 (BettinaPetzold等,1999)。PeterAxelsson提出了一种迭代加密TIN的滤波算法(AxelssonP,1999)。Vosselman等人提出了基于坡度变化的滤波算法(Georgevosselman,2000)。
与国外的研究相比,国内关于激光LiDAR测量技术的研究开始的相对较晚,尤红建博士很早就对激光雷达数据中建筑物的提取进行了深入的研究(尤红建,2001)。张小红博士对机载激光LiDAR数据的处理进行了研究,提出了一种移动面拟合法滤波算法(张小红,2002)。赖旭东博士提出了一种融合激光雷达数据多种信息(强度信息、距离信息)的滤波方法(赖旭东,2006)。曾齐红博士提出了一种根据几何数据与属性数据进行激光雷达数据滤波的方法(曾齐红,2009)。殷飞等人提出了一种自适应TIN迭代加密的滤波算法(殷飞等,2010)。曹红新等人更深入的研究了数学形态学方法的滤波(曹红新等,2011)。
虽然机载激光雷达滤波方法已经发展成熟,其大致可以分为:形态学滤波法、基于曲面的滤波算法、基于地形坡度的滤波算法和基于内插的滤波算法等方法(黄先锋等,2009)。但对于车载激光雷达数据后处理技术的研究比较落后,尤其是车载激光雷达数据的滤波方面的研究。所以车载点云滤波大多都是借鉴机载点云滤波的思想,加以改进,并且结合实际进行研究的。
围绕滤波的基本原理,国内外的许多学者提出了众多的车载滤波方法,如卢秀山等提出了一种改进的数学形态学在车载激光LiDAR点云方面的滤波方法(卢秀山等,2014)。房乐华等提出了一种面向对象的车载LIDAR点云滤波方法(房乐华等,2015)。田茂义等提出了一种基于格网分层的方法进行车载激光点云滤波的方法(田茂义等,2013)。杨洋等人提出了一种基于扫描线的车载激光LiDAR点云滤波方法(杨洋等,2010)。此外,岳红妮等通过总结和比较现有的滤波算法,结合城区LIDAR点云的特点,提出改进的TIN迭代加密滤波方法,解决了将经典TIN迭代加密滤波算法直接应用于到车载LIDAR点云滤波带来的问题,从而提出一种改进的TIN迭代加密滤波算法(曾红妮等,2016)。
1.3 本章技术路线和章节安排
LIDAR技术背景
空间体元的地形滤波方法
LIDAR滤波方法
图1 技术路线图
章节安排:
1.第一章 引言。主要阐述本论文的研究背景、研究目的和意义,并介绍LIDAR滤波的国内外现状。
2.第二章 LIDAR技术背景。本章重点介绍LIDAR技术与车载LIDAR系统,并且描述了一些LIDAR数据的特点。
3.第三章 空间体元地形滤波算法。本文提出了一种基于空间体元的滤波方法,本章详细阐明了算法流程、算法描述和精度评价方法。
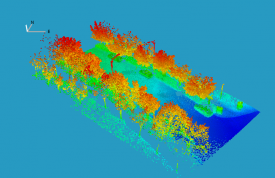
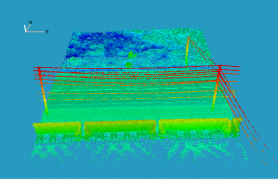
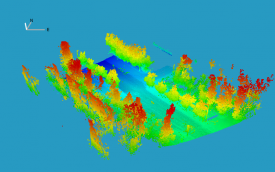
4.第四章 数据描述。本论文采用4个由不同车载传感器采集的实验数据集来验证提出的算法性能。本章具体描述这四个实验集。
5.第五章 精度分析实验。对不同数据集下的车载LIDRA数据进行滤波,分析算法精度以及参数敏感性分析。
6.第六章 全文总结与展望。章节主要论述了本研究的主要结论,并对今后进一步的研究工作进行展望。
- LIDAR技术背景
2.1车载LIDAR技术
激光扫描测距技术 LIDAR (Light Detection And Ranging)是一种主动式的遥感技术,能够直接获取地面的三维信息,并且能够实现全天候的数据获取。LiDAR扫描技术是近年来发展最为迅速的一种地球空间信息的获取手段,它是随着激光传感器本身的发展而发展的。其主要分为:星载LiDAR技术、机载LiDAR技术、船载LiDAR技术和车载LIDAR技术等,它们具有不同的传感器组成结构。随着新技术的不断发展,人们对基于LiDAR数据的建模要求也越来越高,对模型精度的要求也在不断地在提高。所以,车载LIDAR技术的发展成为当前LIDAR技术发展的一个重要方向。
车载LIDAR系统的核心器件是激光扫描设备,目前生产激光扫描仪的公司比较典型的有美国的3DDigital公司和Polhemus公司、瑞士的Leica公司、奥地利的Riegl公司、瑞典的TopEye公司、加拿大的Optech公司、法国的MENSI公司、澳大利亚的I-SITE公司、日本的Minolta公司等。国内外的研究机构与公司也相继推出了一些车载LiDAR系统,如:日本东京大学空间信息科学中心研制的VLMS(Manandhar amp; Shibasaki, 2002;Zhaoamp; Shibasaki, 2005), 3D Laser Mapping 和 IGI 公司合资开发的 StreetMapper 360系统(Hunter et al., 2006; Kremer amp; Hunter,2007; Haala et al., 2008; StreetMapper,2012),加拿大 Optec 公司的 Lynx Mobile Mapper 系统(Zampa amp; Conforti, 2009;Lynx,2012),奥地利Riegl公司的VMX 450系统(Riegl,2012),国内的山东科技大学、南京师范大学、首都师范大学也相继研制了车载LiDAR系统(卢秀山amp;黄嘉,2007;江水等,2007)。2011年,我国由刘先林院士主持研制的首台完全拥有自主知识产权的车载LiDAR系统(车载激光建模测量系统SSW-MMTS)目前也已投入量产。
车载LIDAR系统可以快速获取地球表面物体的三维坐标信息,是移动测绘技术的新兴技术途径。具有速度快、成本低、精度高、受天气影响小、扫描细节精细等特点,对于获取城市精细地物的综合信息具有很大的优势,因此被广泛应用于“数字城市”的建设中。基于车载LiDAR点云数据,分离出地面点和非地面点的过程称为点云数据的滤波。经滤波后的点云数据,被分成为地面点和非地面点,然后根据具体实际的需求,可以进一步进行点云的提取和分类。从地面点上提取出道路标识线的信息或从非地面点中进一步区分出建筑物、自然地物和植被等的过程,称为点云数据的分类或专题信息的提取,这些专题信息在当前的“智慧城市”和“数字城市”建设中发挥着举足轻重的作用。因此,本论文将探讨目前系统开发的基于体元的方向性增长的车载激光LiDAR滤波算法,并通过各种分辨率的车载激光数据来分析其滤波精度,评价其系统的实用性和可靠性。
剩余内容已隐藏,请支付后下载全文,论文总字数:31753字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

