论文总字数:16121字
目 录
一、 绪论 3
1.1 LIDAR技术和数据结构特点 3
1.2滤波算法研究的意义 4
1.3目前滤波算法研究现状 5
1.4目前曲面拟合算法研究现状 6
二、基于扫描线构建等边三角形的滤波算法 7
2.1生成扫描线并排序 7
2.1.1生成扫描线 7
2.1.2进行扫描线点排序 8
2.2处理扫描线 9
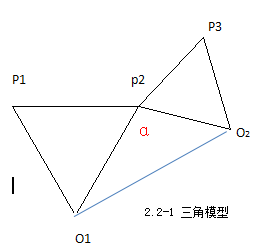
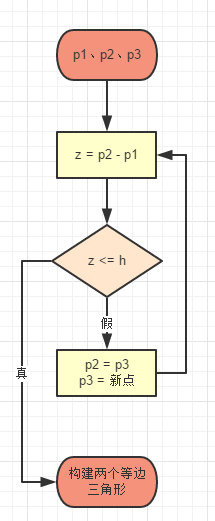
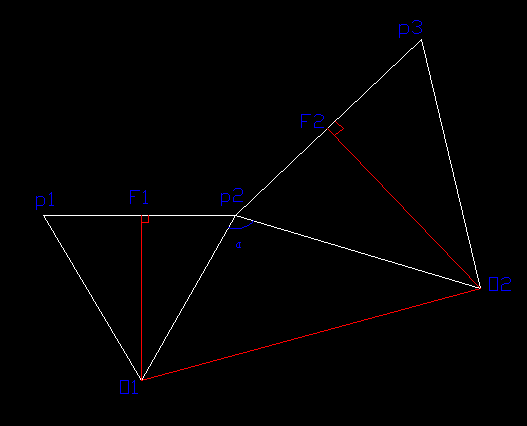
2.2.1构建等边三角形模型 9
2.2.2顺处理扫描线 10
2.2.3逆处理扫描线 13
三、整体曲面拟合 14
3.1构建类矩形格网 14
3.2 最小二乘原理拟合曲面 14
3.3遍历原始数据整体曲面拟合 17
四、扫描线滤波算法和曲面拟合算法误差分析 18
4.1扫描线滤波算法误差分析 18
4.2曲面拟合算法误差分析 19
4.3综合定量误差分析 21
五、总结与展望 23
5.1总结 23
5.2展望 23
参考文献: 24
致谢 25
基于扫描线组构建模型的机载LiDar数据滤波方法研究
韦子胜
,China
Abstract:According to the known Light Detection And Ranging(LIDAR) data and the rational use of data characteristics, a LIDAR filtering algorithm is proposed. Firstly,the scanning lines group formed with point Sequence are obtained though scanning the point cloud along the same direction with the x coordinate at equal intervals, construct two equilateral triangles between three adjacent points of the scan line, set the angle between the two triangles, so as to filter out the surface points on each line.Then, a rectangular grid is constructed on the ground points of each scan line after filtering in the y-coordinates, and the least squares method is used to perform surface fitting, and the original data is traversed, according to the fitted elevations of the original data points in the grid surface. The actual elevation compares its attributes, leaving ground points to filter out the ground points. The results show that the filtering method in this paper can effectively achieve the desired goal, remove buildings and feature points, have good applicability, and the algorithm time complexity is O(n).
Key words: Light detection and ranging; Filtering; Point cloud;Scanning line;Least squares method;Surface fitting
绪论
LIDAR技术和数据结构特点
LIDAR(Light Detection And Ranging):即激光定位探测与测量技术。机载LIDAR是以飞机为载体用激光进行探测和测距,以激光扫描仪主动式测量数据,可以实时得到地物于地球的三维空间信息的技术手段,它具有可自行采集数据、与传统测量相比几乎不受天气影响、数据生产周期短、数据精度高等特点。
机载LIDAR系统(如图1.1-1)主要包括: (1)动态差分GPS(Global positioning System)接收机:利用RTK差分技术来确定扫描中接收机中轴的空间位置;(2)惯性导航系统INS(Inertial Navigation System):确定扫描装置主光轴在飞行状态下的空间姿态参数;(3)激光扫描测距系统(Laser Scanner):根据激光往返实际计算传感器到地面物体的距离;(4)CCD成像装置(主要是高分辨率数码相机):用于记录地面的实况,以获取对应地面的彩色影像,并最终可用来成果对照的正射影像。
机载LIDAR技术原理:目前电磁波可分为无线电波,X 光,可见光,红外光等,而在雷达中,由发射机向下发出的无线电波发射到空中,部分电磁波光束经物体或空气反射后,会将信息返回到雷达的接收器系统,这部分反射波称为雷达信号,反映了无线电波到达物体后返回雷达的距离和其它信息。激光测距的基本原理:利用光在空气中的传播速度结合飞机的位置信息,根据光波到被测物体往返传播的时间,来求得往返的距离值,再借助GPS技术知道飞机发射电波所处的位 置,以及电波返回时飞机所处的位置信息,经过解算可以计算得到被测物体的空间位置。因为雷达从发射到接收的时间为t秒,所以往返的距离为 ,其中c 为光波在理想状态下的传播速度为
,其中c 为光波在理想状态下的传播速度为 m/s。只要精确地知道时间就可以求出距离D;再通过和飞机前后空间位置解算可得被测点的坐标。
m/s。只要精确地知道时间就可以求出距离D;再通过和飞机前后空间位置解算可得被测点的坐标。
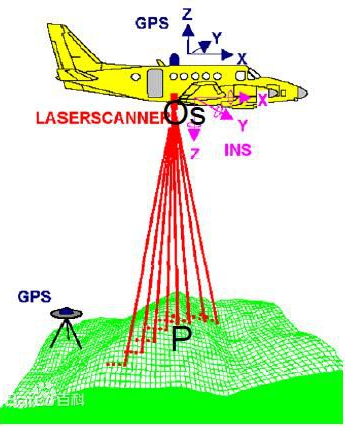
1.1-1 系统原理
机载LIDAR数据特点:经过LIDAR设备可以获取的回波信号信息很多,有扫描点的空间三维坐标、回波强度、回波次数和系统参数等信息(如无特别说明,本文所研究的仅是点的三维信息)。主要包括:(1)几何信息:由GPS、INS等解算出来的坐标数据,然后再通过坐标解算和转换完成的整个测量区域的大地坐标换算的数据是核心数据;(2)激光强度信息:不同的地物对激光的反射程度不同,这部分信息代表了不同地表物体,由此可以借助激光强度来表示地物是何种介质属性;(3)激光回波数据:激光照射到地物上时,产生的回波次数和强度都不相同,可对植被,车,建筑物等进行区分;(4)光谱信息:新型的仪器设备上都带着多传感系统,三维与颜色信息的结合是以后的发展方向。(5)数据格式:目前国际上标准的LIDAR数据存储格式为*.las。
1.2滤波算法研究的意义
机载激光LIDAR技术是一种可以快速获取物体表面模型的技术,在非接触测量目标的情况下,目标可以是任意实体,测量不受时间气候的限制,直接获得地面特征点的信息,在三维建模方面等方面都有着重大用途,在林业、测绘等相关行业有着良好的应用前景,在森林研究、三维城市建模、城市道路监测、地形测绘、海岸工程、电力线测量、文物保护、灾难测量评估等领域扮演着日益重要的角色。并且数据采集精度高、作业周期短、后期处理的自动化程度高、满足高精度的DSM,经过数据处理可得到常用的DTM、DEM。从激光扫描仪获得的数据是具有点的三维坐标、色彩、激光回光强度、回波次数数据、激光光谱信息等信息的点云数据,如何可以合理、高效地对这些点云数据分类,进行后续相应的处理和运用,其研究方向一直都是激光雷达领域内的热点和难点,其中滤波算法是重要的处理手段。但是地物结构复杂,滤波算法判断条件不能适应所有的地形地物特征,导致自动滤波算法总是在某些区域或地形下出现误差,需要人工的干预进行修正,因此研究合理的、快速、准确的自动滤波算法具有重要意义,鉴于此,本文对机载激光lidar 点云的滤波算法以及对曲面拟合算法进行了深入研究探讨。
1.3目前滤波算法研究现状
LiDAR数据经过前期数据处理后得到较为精确的离散点云数据,此时有些数据位于地球表面上,称为地面点,有些位于植被,建筑物,人造物等上,称为地物点。而获取DEM数据的工作:是把分布在地面上的点(地面点)与分布在其他目标上的点(地物点)进行区分,此时只讨论已知点三维位置信息。设定地面点与地物点的区分规则和假设建立一些数学模型,以此来实现地面点和非地面点的判断。在各种判别算法中的基本问题都是:如何准确寻找初始地面点并确定初始地面点是真,已知初始地形点,就可以以初始地形点搭建一个模型或者以其为基础加入一些规则来寻找其他符合条件的地面点,很多学者对此问题提出了两种思路:一是自下而上,从局部出发扩展到全局;二是自上而下,先假设得到大范围的粗糙地形,然后逐步缩小范围细化到局部。而基于邻近点高程信息判断点的归属,总结出来的判读规则大致有两种:(1)在一定范围内,高程突变的点一般都为地物点;(2)自然地形变化引起的高程变化量在一定阈值内。近年来,出现大量对 LiDAR点云滤波方法进行了研究并提出了相关算法。武汉大学张小红教授总结过现有的滤波方法,大致可以分为:坡度滤波法、移动窗口滤波法、数学形态滤波法、渐进三角网滤波法和其它滤波方法。
(1)坡度滤波法:
以地形引起的坡度变化小于地物引起的坡度变化为基础思想,当相邻近的两点间高程差越大时,则该高程差是地形高程起伏变化造成情况的可能性就越小,并且其中高程值较大的那个点就很有可能属于地物点[1-2]。将两点之间的距离与高程差的关系用一个函数关系式表达,即就是根据两点间实际距离与高差与函数阈值比较以此来区分地面点和地物点。波度滤波法原理简单,算法易于实现,适用性好,但该算法需要逐点进行相邻点间的比较,且需要根据地形来设置函数,如何设置自适应的函数是该算法的改进方向。
(2)移动窗口滤波法[3]:
剩余内容已隐藏,请支付后下载全文,论文总字数:16121字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

