论文总字数:14313字
目 录
1.绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状及分析 1
1.3 本课题的主要研究内容 2
2. 实验数据介绍 2
2.1 实验介绍 3
2.2 雷达的介绍 4
3. 船舶检测方法 7
3.1 数据预处理 7
3.2 自适应选取阈值 9
3.3 轨迹追踪预测 9
4. 验证与比较 10
4.1 直线运动的目标跟踪 10
4.2 曲线运动的目标跟踪 12
4.3 误差分析 15
5. 船舶检测仿真软件 15
5.1 软件开发 15
5.2 软件操作 17
6. 总结 19
参考文献 20
致谢 21
导航X波段雷达目标船舶跟踪方法研究
矣娜
,China
Abstract: In ports, collision avoidance of ship navigation is very important, so it is imperative for the inspection and tracking of ships. This paper studies the tracking method of ships by using nautical X-band radar. First, in order to reduce the effect of sea clutter on ship detection, the X-band radar image is preprocessed using contrast-constrained adaptive histogram equalization (CLAHE), and then the adaptive threshold is selected using the normalized cumulative distribution. The method does not require empirical parameters to determine the threshold of the ship in the image. Second, in order to track the trajectory of the ship, the first-order and second -order polynomial equations of the ship's motion are constructed using the tracks of ships in the previous four scans, and the ship is predicted at the next moment using equations. Using the experimental data, the method proposed in this paper was verified. The correct rate of the ship tracked in two different situations was 97%, and the error was analyzed. Finally, in order to facilitate the application of the algorithm, a ship detection software was developed using the GUI in MATLAB. Through the adaptive threshold selection method, the ship's tracking is excellently achieved.
Key words: X-band radar; ships; targets detection; targets tracking
1.绪论
研究背景与意义
随着经济全球化的深度扩大,各国之间的贸易更加频繁。船舶作为货物运输的重要工具,其在海洋上的航行也变得更为普遍。为了使船舶在海洋中安全地按航线行驶,导航设备是不可或缺的。雷达不仅不受气象条件的干扰,而且能实时地获得运动目标的距离和位置,这为船舶的导航提供了绝佳的条件。随着导航X波段雷达应用的推广,各国更加注重其技术研究尤其是在港口对船舶的检测和跟踪引领的技术研究。雷达系统安全效能的高低取决于雷达跟踪环节工作性能的优劣。[1]在海事安全管理方面,良好的雷达目标跟踪能力可以使船舶更加安全地行驶,同时也能提高航运效率,对水域环境的保护亦有一定的积极作用。
利用目标跟踪和滤波处理,雷达的数据处理系统可以为良好的目标航迹信息提供质量保障。X波段雷达(8~12GHz)[2]天线尺寸小,具有更高的径向距离分辨率,在雷达发出信号进行单次扫描时,通过反射回来的信号可以获得各个目标的视线观测数据[3],从而精确地定位。大多数船舶也都会配备X波段的雷达。导航X波段雷达可用于监测海上的移动目标,对船舶的安全进港和出港都能起到良好的监测引导作用,有效避免船舶之间的碰撞事故。
1.2 国内外研究现状及分析
目标跟踪是通过观测目标位置的相继变化来建立目标运动轨迹的过程,在军事和民用领域中作为一个基本问题而备受关注和研究。19世纪初Gauss(高斯)[1]提出的最小二乘法是最早的雷达信号处理方法,该方法经后人不断的修改和完善也已经具备实时运算的能力。20世纪40年代诞生了采用波门式距离跟踪和圆锥式扫描式角度跟踪的单目标跟踪雷达,就在这个时期,Wiener(维纳)[1]等人提出的维纳滤波理论则成为了现代滤波理论的奠基。20世纪50年代,单脉冲雷达出现了,该雷达的出现具有里程碑的历史意义。60年代以后,数字跟踪系统也被开发出来,卡尔曼滤波理论占据了数据处理领域的主要地位。[1]
最初Wax[4]提出了多目标跟踪理念,70年代时,卡尔曼滤波理论成功地运用到目标跟踪上。到目前为止,人们也开发了不同的船舶的跟踪方法[4],例如,在国内,有利用采集的红外图像进行船只跟踪[4] 的方法,1983,周宏仁提出了机动目标的“当前”统计模型[6],李斌等人[5]基于特征融合的船舶检测跟踪方法,以及雷达跟踪等方法[3]。在国外,1969年,R.A.Singer提出了Singer模型[7](即一阶时间相关机动加速度模型),该模型有较大的误差。1984-1989年Blon和Bar-Shal提出了IMM算法[8],1997 年,K.Mehrotra和P.R.Mahapatra 提出了机动目标的 Jerk 模型[8]。其中关于SAR舰船检测研究,各国人员就此提出了很多算法,如恒虚警率(Constant False Alarm Rate,CFAR)检测算法[9];加拿大商用软件OMV使用K-CFAR进行舰船检测[9];Waterman C C等使用双参数CFAR对SAR图像检测[9]。 以上研究表明,与基于红外扫描成像的特征融合检测跟踪方法相比,雷达不仅能够实测出运动目标的距离和方位,而且不受天气条件的影响,是一个对船舶检测跟踪的极佳方法。
但是,以上提到的雷达目标检测方法具有一定的条件限制,原因是使用的雷达系统并不适用于本文的实验数据。为了在本文的实验数据中能很好地检测到船舶,因而提出了自适应选取阈值的方法来跟踪船舶。
1.3 本课题的主要研究内容
利用导航X波段雷达实现船舶的跟踪,本文对此做了相关的研究与分析。简述了船舶目标跟踪技术的基本原理和几种船舶检测跟踪方法,本文将在两组实验数据(单船运动情况和多船运动情况)中研究船舶的检测和跟踪方法。本文采用的是自适应阈值选取的方法进行船舶的检测,利用四个时刻的船舶点迹进行船舶的轨迹预测。
本文的创新点如下:
(1)利用对比度有限自适应直方图均衡化(CLAHE)对X波段雷达图像进行预处理,有效降低了海杂波对船舶检测的影响;
(2)建立了自适应阈值选取方法,不需要经验参数确定图像中船舶的阈值;
(3)利用多组轨迹建立船舶的运动方程来预测船舶轨迹。
本文共分为六章内容,具体的结构安排如下:
- 第一章主要阐述本课题的研究背景和意义,并介绍论文的内容结构。
- 第二章介绍实验的数据,包括数据采集的时间和地点,雷达的相关配置情况等。
- 第三章详细解释本文建立的船舶检测方法,首先是数据的预处理,包括滤波的使用,其次是对自适应阈值选取的介绍,接着介绍航迹外推的方法。
- 第四章对实验得到的结果进行验证,首先对比滤波前后的雷达图像效果,然后对方法中的一阶和二阶拟合作对比,以及单船和多船的情况对比。最后分析误差及解释误差产生的原因。
- 第五章利用MATLAB中的GUI图形用户界面制作船舶检测仿真软件,包括软件的开发、软件的操作及达到的效果等。
- 第六章总结全文。
2. 实验数据介绍
本章节将进行此次实验数据的详细介绍,其中包括数据产生的时间、地点以及雷达相关配置等情况的介绍。
图1 海坛岛位置(红色矩形框),橙色五角星为实验地点(图片源于http://www.google.cn/maps/@25.5747264,119.8705936,11z)
 2.1 实验介绍
2.1 实验介绍
此次实验的时间是2013年12月至2014年1月,实验地点位于海坛岛的东侧(图1)。海坛岛隶属于福建省福州市平潭县,是平潭县主岛地处福州市的东南部,距福州约有128公里,东面就是台湾省,岛屿南北长29公里,东西宽19公里,面积为267.13平方公里,占平潭县总面积的72%,因为岛屿的形状似坛,所以得名海坛岛。如图1所示,红色矩形框标注的是海坛岛,其东部标注的橙色五角星位置即为实验地点。
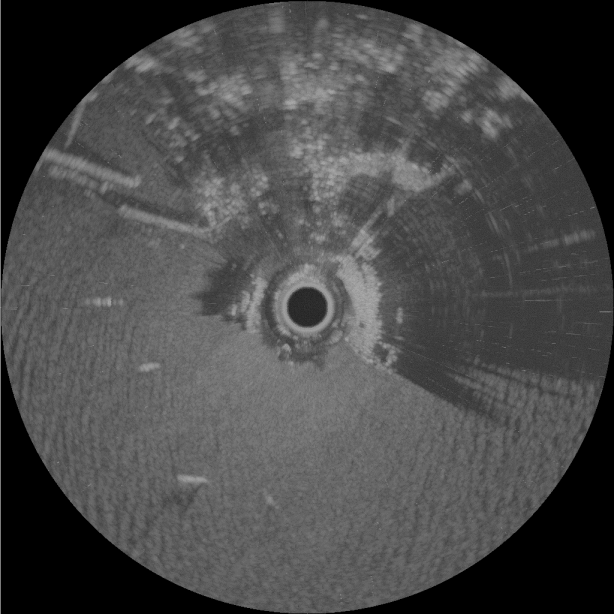
如图2所示,观测所用的雷达站位于圆圈的中心,获得的雷达图像是以该点为中心半径约为3千米的灰度图,此处只显示了2.5千米,雷达站的北部是陆地东南方与外海连接。从图3可以看到,观测站的西边有明显的两条横线,这两条横线是防波堤,也就表示这块区域是一个港口,并且这个港口停靠着非常多的船,如图中菱形框标识的地方就是船舶,港口的东部和北部都是陆地。
剩余内容已隐藏,请支付后下载全文,论文总字数:14313字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

