论文总字数:40162字
摘 要
作为现代工业中应用范围最广、实际应用最多、生产规模最大的工业机器人,关节型机器人具有结构简单、动作可控性高、工作范围大的优点,并根据末端执行器的不同可实现抓取,移动,旋转等不同功能。在这些操作中,机器人的精度是至关重要的属性,它直接影响了操作的结果。因此,研究如何提升关节型机器人的精度,对提高国内制造业自动化水平和制造能力有十分重要且深远的影响。
本文针对某型号六自由度关节型机器人进行研究分析,主要对机器人的总体结构设计进行分析,提取关键设计数据以对机器人进行运动学分析,并以此为基础进行误差模型的建立和分析,最后对分析结果进行验证。最后得出的结果可以对机器人进一步的设计优化提供依据和建议,也可以对同类型机器人的生产设计和研究起到参考作用,因此本课题的研究对关节型机器人的生产具有广泛的指导意义和研究前景。
为了建立正确和准确的机器人模型,本文还对机器人模型的建立进行了详尽的研究,包括齐次变换、D-H建模、理论正逆运动学分析以及MDH模型的建立等。此外,作者还对机器人零件的关键制造尺寸通过三坐标测量仪进行了测量,并组装加电对其进行工作能力和位姿精度的测试,将得出的结果与模型结果进行了对比和分析。
关键词:机器人;运动学分析;D-H模型;误差分析
Error Analysis and Design Research of
Six DOF Articulated Robot
02011515 Tang Shiyao
Supervised by Xu Chao
Abstract:
As the most widely and practically applied and most largely producted robot in modern industry, articulated robot has a simple structure, highly-controllable action ability and wide operating range. In accordance of what end-effector is installed, articulated robot can achieve many different functions like grabbing, moving and rotating, in which the accuracy of the robot takes the most important and essential role and directly affects the result of the operation. Therefore, the study of how to improve the accuracy of articulated robot has a very important and far-reaching impact on enhancing domestic manufacturing automation and manufacturing capabilities.
This article mainly analyzes the global stuctrue of a six DOF articulated robot and extract the key design data of the robot to carry on the kinematic analysis , on which the establishment and analysis of the error model is based, and further verify the result of the analysis. The final result can provide evidence and recommendations for further design optimization of the robot as well as serve as a reference for the design and research of the same type of robots. Thus the subject has broad significance for the production of articulated robot.
This article also has a detailed study of setting up the robot model in order to establish a correct and accurate robot model, including the homogeneous transformation, D-H modeling, theoretical analysis and inverse kinematics, and the establishment of MDH model, etc. In addition, the author measures the key manufacturing dimensions of the parts of the robot with CMM, and further assemble the robot to test its working ability and pose accuracy. The result obtained in the test is compared with the model and analyzed.
Key words: Robot;Kinematic Analysis;D-H Model;Error Analysis
目 录
1、 绪论 1
1.1 引言 1
1.2 六自由度关节型机器人误差分析研究的背景和意义 1
1.3 六自由度关节型机器人误差分析研究的研究现状 2
1.3.1 误差的产生和消除 2
1.3.2 国内误差分析现状 3
1.3.3 国外误差分析现状 3
1.3.4 研究现状总结 3
1.4 本文的主要研究内容 3
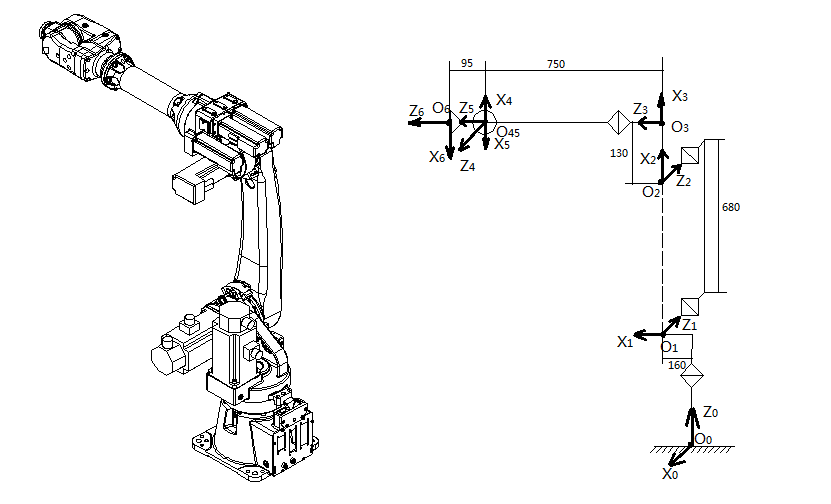
2、 研究对象 5
3、 运动学分析 6
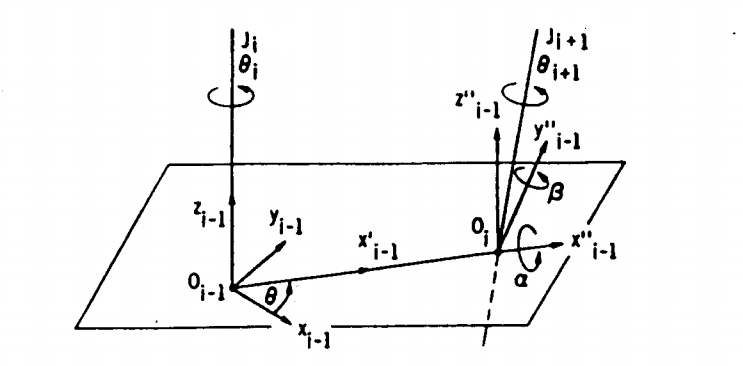
3.1 齐次变换 6
3.1.1 齐次坐标及其运算 6
3.1.2 齐次坐标变换 6
3.1.3 齐次逆变换 7
3.1.4 平移和旋转变换 8
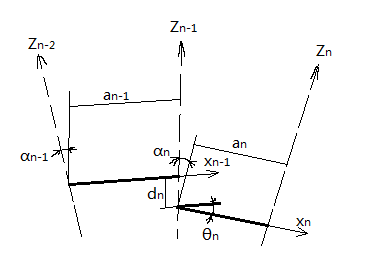
3.2 D-H模型的建立 9
3.2.1 D-H参数的确定 9
3.2.2 连杆坐标系的设置 11
3.2.3 D-H矩阵计算 11
3.3 正逆向运动学分析 12
3.3.1 正向运动学方程 12
3.3.2 逆向运动学方程 14
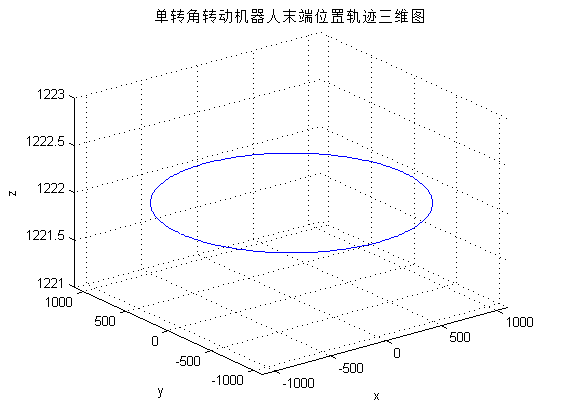
3.4 运动轨迹分析 17
4、 修正误差模型的建立 18
4.1 M-DH模型 18
4.2 M-DH模型应用 19
5、 零件测量与误差分析 21
5.1 零件测量方案 21
5.1.1 测量方法 21
5.1.2 测量项目 21
5.2 零件测量 23
5.2.1 测量过程 23
5.2.2 测量结果 34
5.3 零件误差对模型参数的影响 37
5.4 实际模型与理论模型对比分析 40
5.4.1 实际模型与理论模型轨迹对比 40
5.4.2 误差来源分析 43
6、 总结和展望 45
致谢 46
参考文献 47
六自由度关节型机器人误差分析及其设计研究
绪论
引言
工业机器人,是在工业自动化不断推进的过程中衍生出来的用于代替人力操作如搬运、加工和装配等简单重复性工作的一种由固定程序控制运动的机器人,它集成了机械、电子、自动控制、传感器等多门科学,被广泛应用于现代制造业中。国际标准化组织(ISO)对工业机器人所作的定义是:“工业机器人是一种具有自动控制的操作和移动功能,能够完成各种作业的可编程操作机”。在通常情况下,工业机器人执行一系列经过空间固定点位置的操作,这些关键性的固定点和机器人的运动参数被记录在储存器内。在执行过程时,机器人通过伺服控制和关节的配合来达到记录的位置,因此工业机器人最主要的技术属性称为“可编程”和“重复示教”。
由于机器人工作不存在危险和人身伤害,而且长时间做重复性简单枯燥的工作也不会因为疲劳而产生偏差,使用机器人代替传统人力操作可以有效的提高生产的效率和产品的质量,同时可以节约劳动力,从而减少生产成本,将对制造业发展产生长久而深远的影响,也会使人民的生活水平进一步提高。可以预见,机器人越来越广泛被应用是未来发展的必然趋势。
六自由度关节型机器人误差分析研究的背景和意义
通常我们将在制造业生产过程中所使用的机器人统称为工业机器人(industrial robot),它是靠控制和自身的动力来自动执行工业中某些特定工作的一类机械装置,通常的工业机器人都是多关节机械手的结构,此外也有其他变形的多自由度机器人形式被投入使用。
现如今科学技术正在突发猛进的发展着,制造业自动化的脚步也正在不断推进,同时也伴随着工业机器人生产研发技术及规模的不断提升。我们可以看到在现在的工业生产中,很多简单重复性的工作已经被各式各样的机器人所代替,如焊接、装配、输送、喷漆等往常比较危险的工作现在都交由机器人来完成,这不仅保证了人身安全,在一定程度上也提高了工作的效率和质量。在如今的机械加工行业、汽车制造行业及零部件制造业、木材加工业、光电行业、显示设备制造业、食品制造业等自动化进程较高的领域中,都能看到工业机器人不断运动着的身影。
随着工业机器人技术的不断进步,其发展趋向于智能化和融合化。由于其结构上的模块化和控制技术上的开放化,配合传感器技术正朝着“多合一”的方向发展,我们可以预见工业机器人在未来将与我们的生活联系得越来越密不可分。然而在实际生产过程中,由于机器人的零部件在制造、安装和装配中会不可避免的产生误差,同时组装出的机器人也会与编程系统中建立的仿真机器人模型存在细微的差异,再加上工作环境对控制系统产生的影响,机器人的实际精度往往达不到预期的目标。所以,想要提升机器人的工作性能,就要求我们采取手段来有效的消除上述因素所产生的偏差,这也是目前机器人工业主要解决的问题。
在我们评价工业机器人的性能时,通常关注的属性是其绝对精度,目前市场上的工业机器人绝对精度仅达到毫米数量级,这大大限制了机器人完成精确操作任务的能力。参考国内外众多学者的相关研究成果发现,工业生产中基本上采用运动学模型参数标定法,即运动学建模、测量、参数辨识及最后的误差补偿的方法提高机器人的末端的绝对位置精度。这是一种通过软件而非改变机械结构或本体设计进而提高机器人精度的方法。然而,在如今国内机器人的本体制造水平还很薄弱的前提下仅仅采用运动学标定的方法提高机器人精度无疑是舍本逐末,对我国机器人制造水平的提高是极为不利的。我们必须回过头来认真分析误差产生的根本原因,从误差产生的源头入手,完善相应的误差理论,为机器人的零件设计、制造及整机装配提供理论支撑,为在工程实践中减小误差和提高机器人定位精度提供可靠的理论依据及实践指导。
六自由度关节型机器人误差分析研究的研究现状
误差的产生和消除
在机器人内置的控制程序中所建立的理想模型和机器人的实际模型之间往往存在着位置和姿态的偏差,这主要是由机器人所处工作环境和机器人本身的制造尺寸等因素造成的。要提高机器人的精度,就要求我们对这种误差进行消除,这也是机器人技术发展的重中之重。通过对机器人的研究,我们把对机器人精度产生影响的因素总结成以下4类[1]:
(1) 参数误差:主要指机器人运动学模型的参数,包括连杆长度、关节轴线扭角、关节的转角误差以及机器人基础系相对于参考系的齐次变换中的误差等。
(2) 负载影响:主要是连杆的弹性变形,齿轮的传动误差,关节变形等。
(3) 数字误差:包括机器人传感器的读数精度,机器人控制器的控制准确性,以及计算时的有效数字误差等。
(4) 环境因索:温度,湿度的影响以及系统误差造成的影响等。
对于应用于不同领域从事不同工作的机器人,不同因素也会有或大或小不同的影响,但总体上来看,机器人在结构设计上的参数偏差所引起的误差大概达到了总误差的80%。因此,确定几何结构参数偏差对机器人产生的影响,对机器人误差消除有着重要的指导和参考作用。
在机器人的精度控制过程中,目前最常用的改善和提高机器人精度的方法有两种[2],其一是误差的预防,主要是从设计制造和装配的角度上提高设计的合理性、制造和装配的精度,从源头上减少制造加工的误差和装配的误差,进而减少机器人的误差,这种方法具有较大的局限性,且对机器人因机械磨损、环境因素和动态因素产生的误差失效;其二是误差的补偿,在工业运用中称之为标定技术,是建立机器人模型并对末端执行器的误差进行测量,然后使用参数识别法对模型实际的参数进行计算并补偿所测得的误差,这种方法的优点是成本低易操作,是目前国内误差补偿应用最多最广泛的方法 [2]。
国内误差分析现状
在误差预防方面,徐卫良[7]和王东署等[8]使用摄动法对不同机器人进行了标定,对比了其他标定方法,证明了其简便性和正确性;丁希仑等[9]、阎华等[10]和秦娜等[11]使用D-H矩阵法对不同的串联机器人的位姿误差进行了补偿,并阐述了公式的推导过程,研究了不同机构的制造误差分布;徐旭松等[12]建立了基于齐次坐标变换的误差模型,并进行了实例研究;马文斌等[13]通过建立主框架的矢量方程组模型,分析了制造误差对机构输出角的影响,并进行了计算机仿真,获得了不同杆件对输出误差的影响;温瑞[14]对六自由度机器人进行了详尽的误差分析,针对运动学正问题和逆问题进行了计算,完成了Adams运动学仿真。黄宇中等[15]对国内外不同误差分析的方法做了简单的概述和对比。
在标定的研究方面,夏天[1]在对两种构造机器人的封闭运动链进行标定的讨论基础上,提出了虚拟封闭运动链标定的方法,并详细的分析和说明了这种方法的原理及使用方法,然后以ABB IRB140 机器人作为研究对象进行了标定试验;陈钢等[6]提出了将位置参数与角度参数分离的运动学参数标定方法,同时设计了一套基于关节角度校正的机器人运动学参数标定实验方法以解决标定过程中关节角度误差问题,并进行了实验验证。
国外误差分析现状
在误差的分析研究方面,由于其研究较为局限,且国外的制造能力较强,近年来对制造误差方面的研究较少。而在标定的研究方面,由于其广泛的应用,相比误差预防国外对于标定的研究较多。Roth[3]等对标定做了详细的介绍和确认了一些尚待解决的实验问题,同时提出了标定的精确度取决于测量系统和模型中包含的参数以及未包含的参数;Nguyen[4]等以现代HP160机器人为实验对象,提出了对含闭链机构的机器人的一种相比普通串联法精确度更高的标定方法,并进行了实验验证;Zaeh[5]对铣削机器人不同工作姿态进行研究,提出了精确的标定方法,大大提高了六轴铰接机器手的经济适用性和工业应用能力。
研究现状总结
对比国内外对机器人误差的研究,可以发现现研究的方向和重点都偏向于机器人误差的补偿方面,因为其操作简单方便,且能准确的使机器人达到预期工作位置。但事实上这些研究往往是建立在机器人的生产制造能力足够纯熟的基础上的,在国内生产制造水平与国外先进水平尚存在较大差距的情况下,我们首先应该从误差的控制入手,同时结合具体机器人的生产资料和数据进行分析,而不是执着于理论分析。也只有这样,国内机器人才能得到长足和深远的发展,这对我国制造业水平提升和自动化技术的推进也有着促进作用。
本文的主要研究内容
(1) 工业机器人运动学分析:针对某型号六自由度关节型工业机器人的设计资料,提取关键的设计数据。根据目前国际上通用的D-H建模方法建立机器人的运动学模型。并以 D-H 模型为基础,完成该机器人的运动学分析,包括运动学正解与逆解。通过MATLAB (或其他软件)编制求解程序,验证运动学模型的正确性;
剩余内容已隐藏,请支付后下载全文,论文总字数:40162字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

