论文总字数:25735字
摘 要
随着太空技术的发展以及各国对太空的探索进一步加深,人造卫星对于人类的意义也越来越大,但是同时我们不得不面对的问题是太空复杂的环境,很多数据表明,太空天气特别是太阳活动的因素是卫星出现故障的主要原因。
首先通过查阅和调研国内外文献,分析了卫星自主导航和先进滤波算法的发展历程,以及太阳活动极端期对卫星的影响。
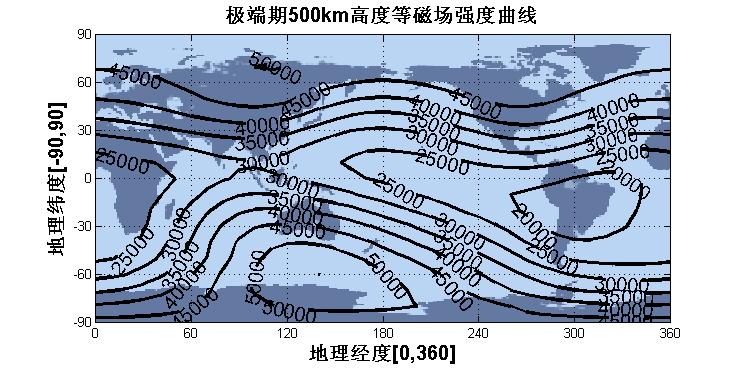
然后在本论文中具体研究卫星的二体轨道,轨道要素,以及相关的摄动问题,建立卫星轨道动力学模型并且完成坐标系的确定和转换。同时研究了不同程度的太阳活动对大气密度以及地磁场等因素的影响。
在太阳活动极端期,传统EKF和UKF两种算法无法准确估计卫星的位置和速度,因此提出了一种基于EKF/AUKF的卫星自主天文导航新方法,设定了两种算法之间切换的原则,构造出一种新的自适应UKF算法,通过数值仿真验证了这种算法具有较好的精度和稳定性。
关键词:天文导航;太阳活动;扩展卡尔曼滤波;自适应无迹卡尔曼滤波
A STUDY ON THE EFFECT OF DIFFERENT LEVELS OF SOLAR ACTIVITY TO THE NAVIGATION SYSTEM OF AUTONOMOUS SATELLITE AND ITS COUNTERMEASURES
Abstract
With the development of space technology and further space exploration, the significance of satellites to human is becoming more and more important, but at the same time, we have to face the problem that the complex environment of space, a lot of data show that the space weather especially solar activity factor is the main cause of a satellite failure.
First of all, through consulting literature at home and abroad, this paper analyzes the development of advanced satellite autonomous navigation and filtering algorithm, and the influence to satellite in extreme period of solar activity.
Then this paper talks two-body of satellite orbit, orbit elements, as well as relevant perturbed problems, the satellite orbit dynamics model is set up and deals with coordinate system and transformation. At the same time varying levels of solar activity on atmospheric density is studied and the influence to earth's magnetic field.
In solar activity extreme period, traditional EKF and UKF algorithm is unable to accurately estimate the position and speed of the satellite, therefore this paper proposes a new satellite autonomous celestial navigation based on EKF/AUKF method, the principle of setting the switch between two kinds of algorithm, a new adaptive UKF algorithm is constructed, and the algorithm is verified and has good accuracy and stability.
Key words: celestial navigation; solar activity; extended kalman filtering; the adaptive kalman filtering.
目录
摘要 Ⅰ
Abstract Ⅱ
第一章 绪论 1
1.1 课题研究背景 1
1.2 国内外天文导航的研究现状 1
1.3 太阳活动对卫星的影响 3
1.4 小结 4
第二章 卫星轨道的运动模型 5
2.1 坐标系及坐标转换 5
2.1.1 参考坐标系 5
2.1.2 坐标转换 6
2.2 卫星轨道运动模型 7
2.2.1 二体轨道特性 7
2.2.2 轨道动力学模型 7
2.2.3 地球非球形引力摄动 7
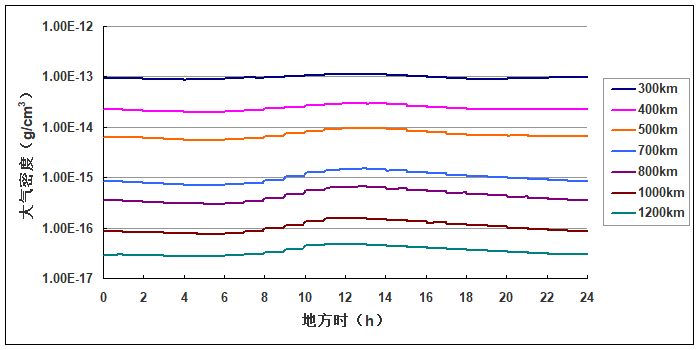
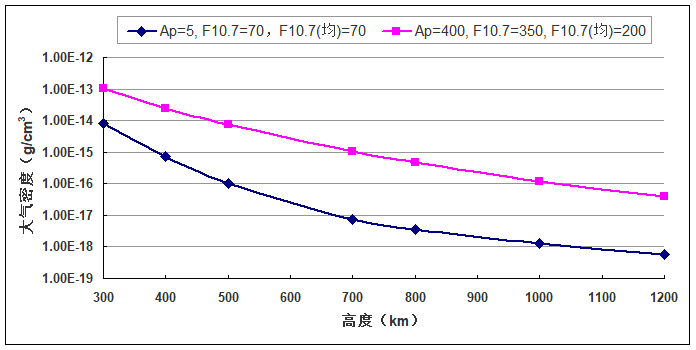
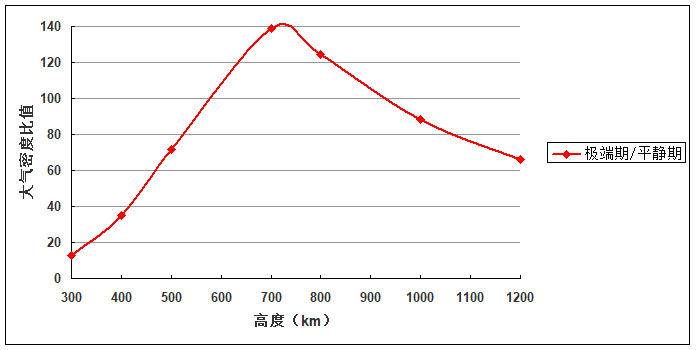
2.3 太阳活动对大气密度和地球磁场的影响 9
2.3.1 大气密度 9
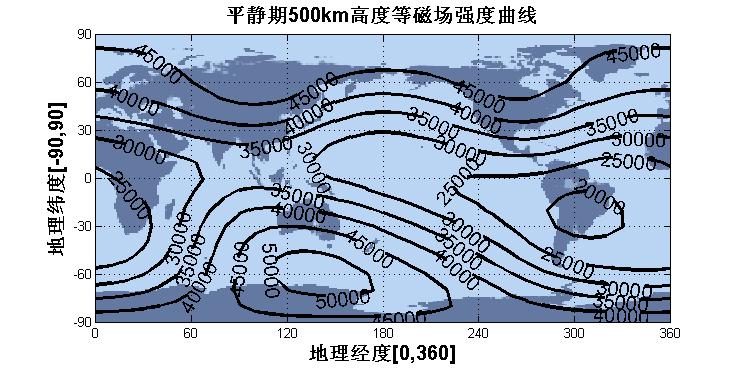
2.3.2 地球磁场 10
2.4 小结 11
第三章 地球卫星直接敏感地平的自主天文导航方法 12
3.1 引言 12
3.2 天体敏感器 12
3.2.1 星敏感器 12
3.2.2 地球敏感器 13
3.3 直接敏感地平自主天文导航 13
3.3.1 天文导航基本原理 13
3.3.2 建立状态方程 14
3.3.3 建立观测方程 14
3.3.4 自主天文导航系统设计 15
3.4 卡尔曼滤波 15
3.5 扩展卡尔曼滤波 16
3.6 无迹卡尔曼滤波(UKF) 16
3.7 AUKF-EKF切换滤波算法 17
3.7.1 切换滤波算法设计思路 17
3.7.2 AUKF算法的设计 19
3.8 小结 20
第四章 天文自主导航算法仿真 21
4.1 仿真条件 21
4.2 EKF滤波算法仿真 22
4.3 UKF滤波算法仿真 23
4.4 EKF-AUKF切换滤波算法仿真 25
4.5 小结 26
第五章 总结 27
致谢 28
参考文献 29
绪论
课题研究背景
随着航天技术的发展,我国的现有的卫星在未来将面临很多的问题和极大的挑战:(1)随着航天技术的迅速发展,太空中的人造卫星数目也得到了极大的增加,空间上的挤压,信息传输量的增长,测控方面几乎完全依赖地面测量控制,这些因素都会导致我国的测量控制系统面临着巨大的压力和负担。据不完全统计,现如今每天有将近1015位的数据来自各种地球卫星,数据方面的增长对于地面系统的压力越来越大,信息处理和测控负担增大的同时不得不面对更多的出错以及各项成本的增长[1](2)军事方面,各国对于卫星方面越来越重视,在侦查通讯等方面有巨额的投入,但是却过度的依赖地面的测控,一旦发生战争,地面设备受到攻击的话,整个信息通讯系统可能面临着完全的崩溃,这会使得战争的天平迅速发生倾斜。(3)在民用方面,随着需求的增加,卫星的数量种类都需要进一步增加,但是由于我国地面设施的不完全成熟,我们需要增加大量的人力物力财力,运营成本面临巨大的增加。(4)我国对于航空航天方面也是非常重视,而且从嫦娥工程以及北斗导航等等方面也取得了非常显著的成绩,但是目前的状况依然是非常依赖地面的测量控制,对于这一点,是急需要改善的。(5)我国对于中、低轨道的卫星进行测控的过程中,存在很多问题需要解决,比如说测控目标数量较大,测量控制的弧段比较短,难以实现全球覆盖进行测控[2~4]。
现如今如何提高卫星的自主性成为了航天事业一项重要的研究项目,这对提高卫星自主工作的效率以及提高轨道运营的效率,降低成本方面都有着重要的意义。而这里面自主导航技术成为关键技术,通过卫星自主处理不需要和外界进行信息方面的传输与交换,同时也不会对海陆设备产生过度的依赖[5~6]。自主性体现在卫星的自保持,具有实时性,这对判断系统自主性是很关键的。如果说实现了卫星导航的自主性,那么在航天领域会产生非常多的正面影响:(1)降低导航的计算复杂程度,计算任务降低以后我们的工作人员的工作量会降低很多,同时对于我们的设施方面压力也会降低很多;(2)一旦出现突发状况,比如说战争,卫星的自主性带来的好处是不过分依赖我们的海陆设备,很大程度上降低了战争突发状况产生的干扰性因素,对于保证正常的通讯等方面有非常大的优势。(3)卫星的自主性能够保证工作任务的延续性,提高自身的生命力;(4)有了航天自主性技术,这极大的解放了人们对太空探索的束缚,人类探索未知领域,深入太空,进行各种任务,这些都能够顺利的进行,可以说实现自主导航是一项非常关键基础性的任务;(5)因为我国的一些特殊情况,比如说幅员辽阔,地理情况复杂等等,卫星自主性的发展可以说很大程度上缓解了在地面布控测控方面的压力,这使得一些之前不能完成的任务可以顺利进行,比如说不可控弧段轨道卫星正常工作运行[7~10]。总而言之卫星自主导航技术在军事民用方方面面都起着非常重要的作用。
卫星自主导航技术如此重要,我们要对卫星自主性提出更高的要求,同时也要求我们对其性能进行改善。我们都知道,卫星所处的太空环境复杂多变甚至有很多人类未知的情况,而这些都需要卫星独自处理,这就要求我们在建模的过程中充分考虑到这些元素。这些元素中,太阳活动可以说是一个非常重要的因素。为了应对太阳风暴对卫星造成的姿态、轨道、功能的影响,就需要我们做出快速而准确的预报,完善卫星自主处理数据的算法,实现更高效更精确的控制成为迫切的需要。
国内外天文导航的研究现状
在古代先人夜观天象研究星星的位置进行一些基本的判断和导航。而到了近代,前苏联成功试射人类第一颗人造卫星,就意味着新时代新纪元。卫星技术取得了长足的发展,深空探测技术也在
不断前进,可以说人类在探索太空方面已经取得了极大的进步。从另一方面来讲,这些航天技术也在潜移默化的影响着人类,而且对人类的文明进步起到了非常大的推动作用,具体而言,无论是在国家方面科技军事等方面还是人们最基本的生产生活方面,都随着卫星等太空技术的发展有发生着翻天覆地的变化。
通过查阅资料可以了解到最初天文导航源于中国,在航海领域最先得到应用。《淮南子》《抱朴子外篇》等文献就记载了船舶在大海中行驶通过辨别北极星来识别方向。这些文献都是可查有依据的,另外通过出土的图和标尺等信息,也强有力地证明了这一点。郑和七下西洋闻名世界,其中就有将罗盘和天文导航相结合的例子,而且取得了不错的效果。可以说在当时这种导航方式是当时最为先进的导航技术。随着后期的西方国家的殖民航海等活动的加剧,天文导航技术可以说也得到了进一步的发展。
二十世纪中期,航天技术在载人方面取得了长足的进步,像登月计划以及太空站的建设使用都用到了天文导航技术。国外已经开始研究一些天体敏感器的在导航方面的技术,到后来我们听得比较多的地球敏感器,星敏感器,太阳敏感器,以及自动空间六分仪等技术开始逐渐成熟并得到应用,这些在军事方面都成为了非常重要的技术,在卫星,舰艇等方面都得到了应用,其中军事领域对于技术层面的推动作用是非常巨大的。在航天技术的发展方向中,直接敏感地平技术的方案技术相对成熟,而且成本较低,但是也有一定的局限性,地球敏感器精度偏低是就是其中很重要的一方面原因。硬件方面的局限性可以通过算法等软件方面的优势来进行弥补。事实表明,这种方案成本相对较低,组成结构相对简单,并且有着比较客观的精度的导航定位系统方案比较有前途,受到广泛的关注。
二十世纪六七十年代,欧美一些国家在这方面取得了显著的研究成果。法国对星光折射自主导航方面进行了探索,这项工作有法国国家研究中心主持的,同时又MARRA以及SAGEM公司参与了研发,这个测量系统有陀螺以及两个捷联式的CCD敏感器组曾。其中陀螺随机漂移量为 ,星敏感器的测量精度为
,星敏感器的测量精度为 。在这项工作中,以低轨道地球卫星SPOT为研究对象,在自主导航的工作原理、测量方案,以及在自然环境对系统观测的约束、误差分配以及系统的性能优化方面都有着详细的实验仿真以及数据分析。此自主系统的导航的精度达到了300m。于此同时,工作人员将此系统为HERMES卫星飞行的备用系统,并且在SPOT-3地球卫星上面进行了轨道的飞行试验[11]。前苏联以及现在的俄罗斯也是一直将天文导航系统放在非常重要的位置。在美国加大对‘导航战’投入以后,苏联注重实效并花费了巨资进行了天文导航理论的研究并且进行了相关实验室的建设。英国在这方面则要求提高潜艇潜望镜六分仪的天文导航能力,要求其定位精度达到0.5海里,也说明了其对天文导航的重视。欧盟则在不断的对星敏感器进行着完善,要求除了能够对恒星进行观测以外,还要对一些非恒星的天体进行检测和跟踪,使之具有导航定位以及确定姿态的多重功能。随着抗空间辐射能力强、集成集中的CMOS器件的出现和CMOS敏感器技术的发展,基于CMOS天体敏感器的深空探测器自主定位导航技术正在被深入和广泛的应用。自主天文导航系统的发展历程可以概括为下表1-1
。在这项工作中,以低轨道地球卫星SPOT为研究对象,在自主导航的工作原理、测量方案,以及在自然环境对系统观测的约束、误差分配以及系统的性能优化方面都有着详细的实验仿真以及数据分析。此自主系统的导航的精度达到了300m。于此同时,工作人员将此系统为HERMES卫星飞行的备用系统,并且在SPOT-3地球卫星上面进行了轨道的飞行试验[11]。前苏联以及现在的俄罗斯也是一直将天文导航系统放在非常重要的位置。在美国加大对‘导航战’投入以后,苏联注重实效并花费了巨资进行了天文导航理论的研究并且进行了相关实验室的建设。英国在这方面则要求提高潜艇潜望镜六分仪的天文导航能力,要求其定位精度达到0.5海里,也说明了其对天文导航的重视。欧盟则在不断的对星敏感器进行着完善,要求除了能够对恒星进行观测以外,还要对一些非恒星的天体进行检测和跟踪,使之具有导航定位以及确定姿态的多重功能。随着抗空间辐射能力强、集成集中的CMOS器件的出现和CMOS敏感器技术的发展,基于CMOS天体敏感器的深空探测器自主定位导航技术正在被深入和广泛的应用。自主天文导航系统的发展历程可以概括为下表1-1
表1-1 自主天文导航系统的发展过程
日期/年 | 系统名称 | 测量类型 | 测量仪器 | 最高定位精度 |
1977~1981 | 空间六分仪自主导航和姿态基准系统(SS/ANARS) | 恒星方向,月球(地球)边缘 | 空间六分仪 | 224m |
1979~1985 | 多任务姿态确定和自主导航系统(MADAN) | 恒星方向、地平方向 | 星敏感器与地平仪 | 100m |
1988~1994 | 麦氏自主导航系统(MANS) | 对地距离(用光学敏感器测量),对地、对日及对月的方向 | MANS天体敏感器 | 30m |
国内航空航天技术这些年也取得了长足的发展,其中东南大学,北京航空航天大学,哈尔滨工业大学,中国空间技术研究所等单位高校在天文自主导航方面的研究也取得了一定的成绩。比较有影响力的有张瑜等人提出的利用星光折射间接敏感地平的导航方案,就极具创新,将模型中的非线性因素进行了有效合理的处理,充分降低了误差的影响[12]。还有就是关晓琳等人提出的基于信息融合的直接敏感与星光折射间接敏感结合,同样是一项非常有影响力的创新,有效的提高了系统的精度和可靠性。
太阳活动对卫星的影响
剩余内容已隐藏,请支付后下载全文,论文总字数:25735字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

