论文总字数:19439字
目 录
1 引言 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.3论文的主要工作和章节安排 1
2 系统方案介绍 2
2.1系统总体设计框图 2
2.2 系统设计原理 3
2.2.1 舵机基本原理 3
2.2.2 后轮双电机差速控制原理 3
2.2.3 编码器测速原理 4
2.2.4 直流电机PID分析 4
2.2.5超声波测距原理 6
3 硬件电路设计 6
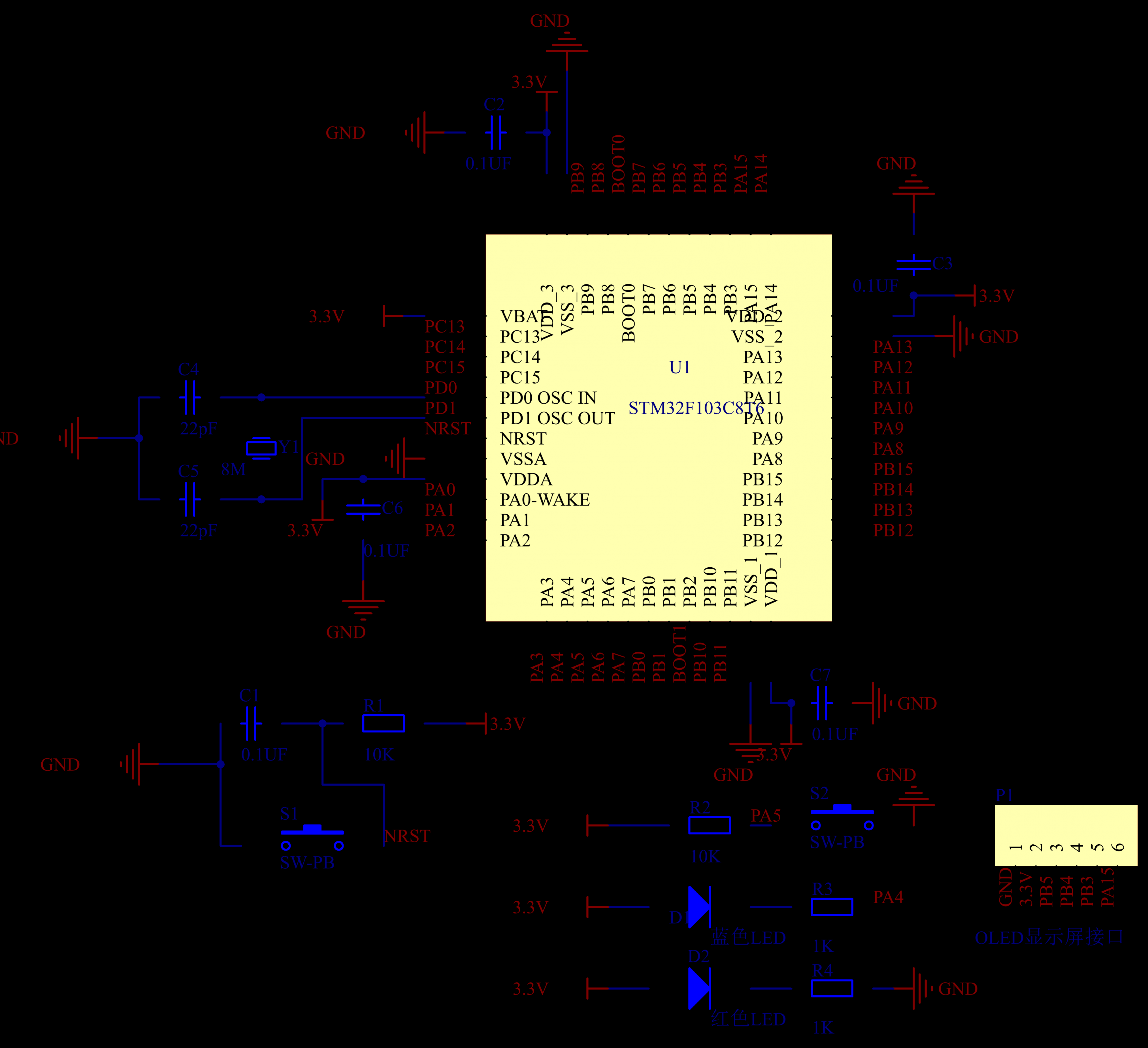
3.1 STM32最小系统 6
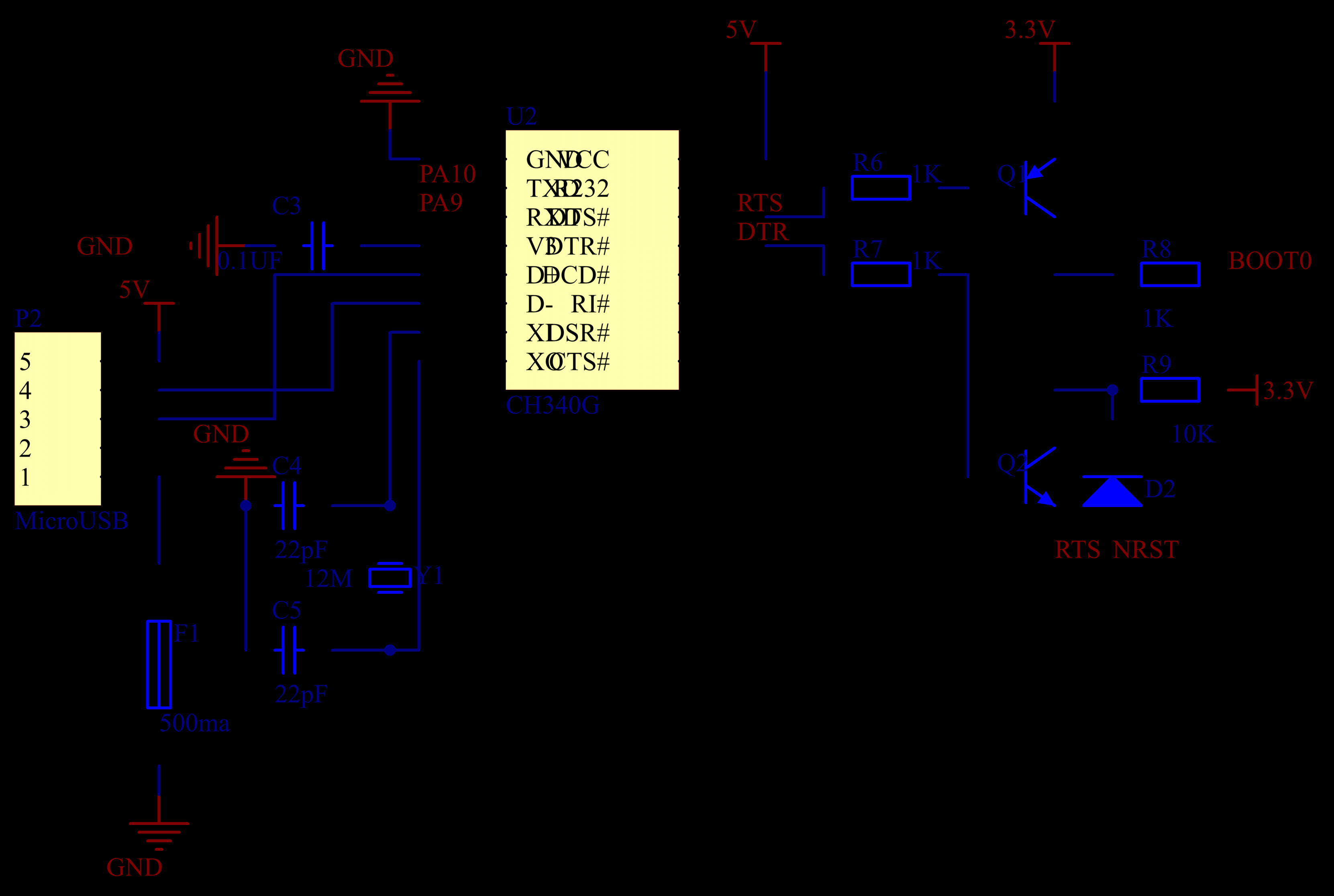
3.2一键下载电路 7
3.3电源部分 7
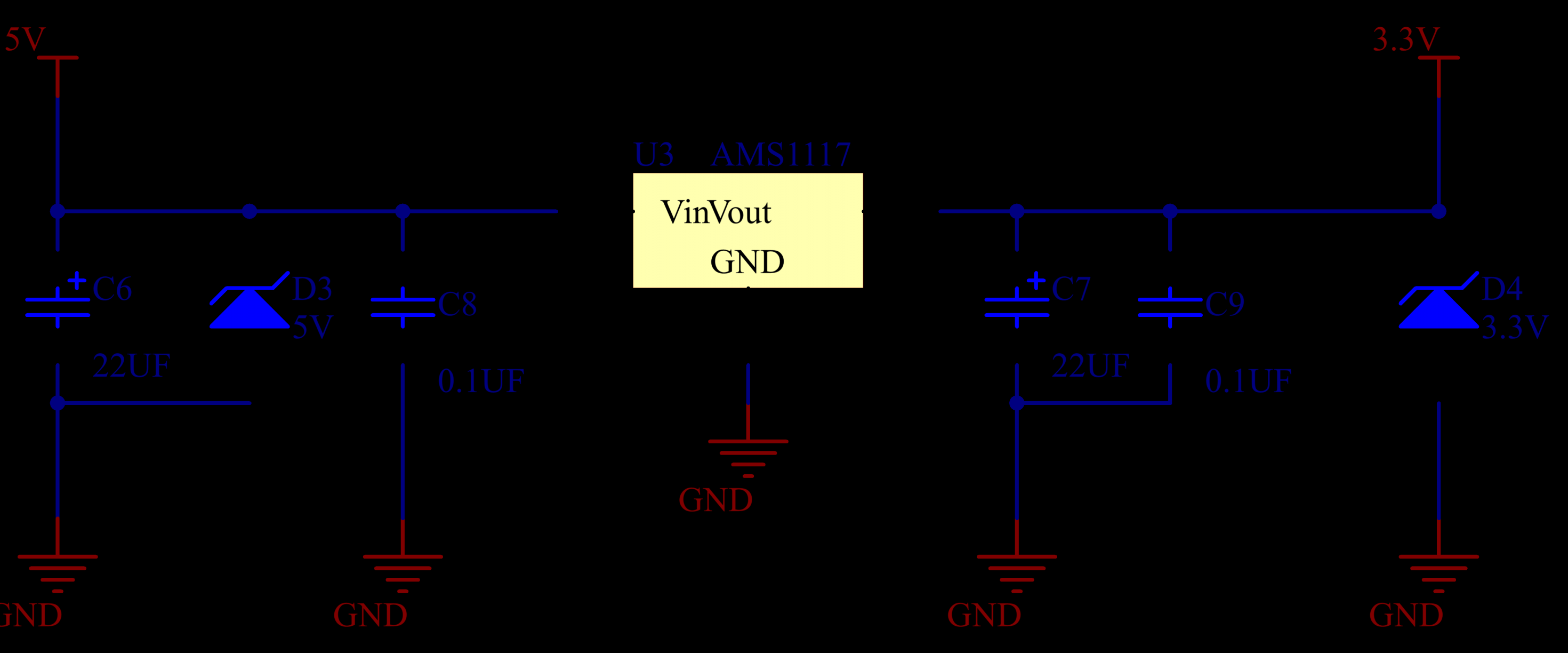
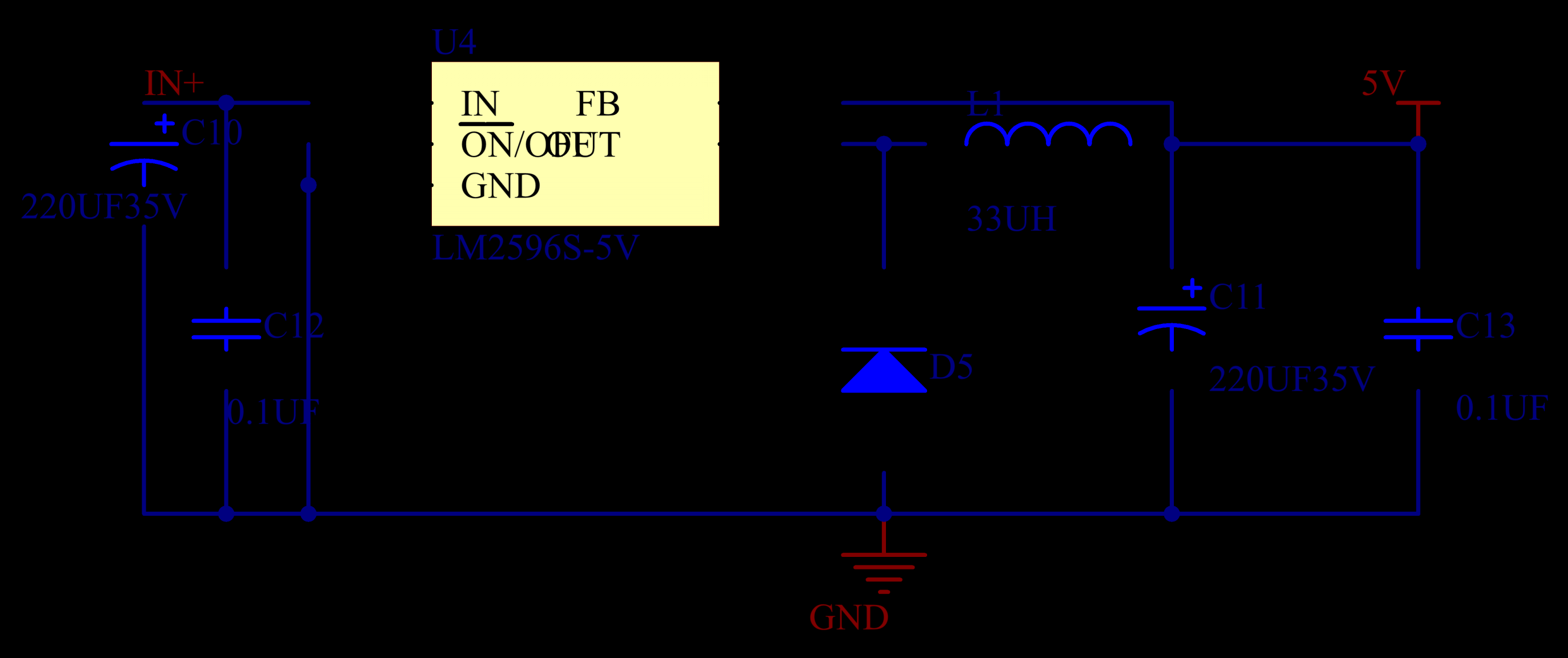
3.4稳压模块 8
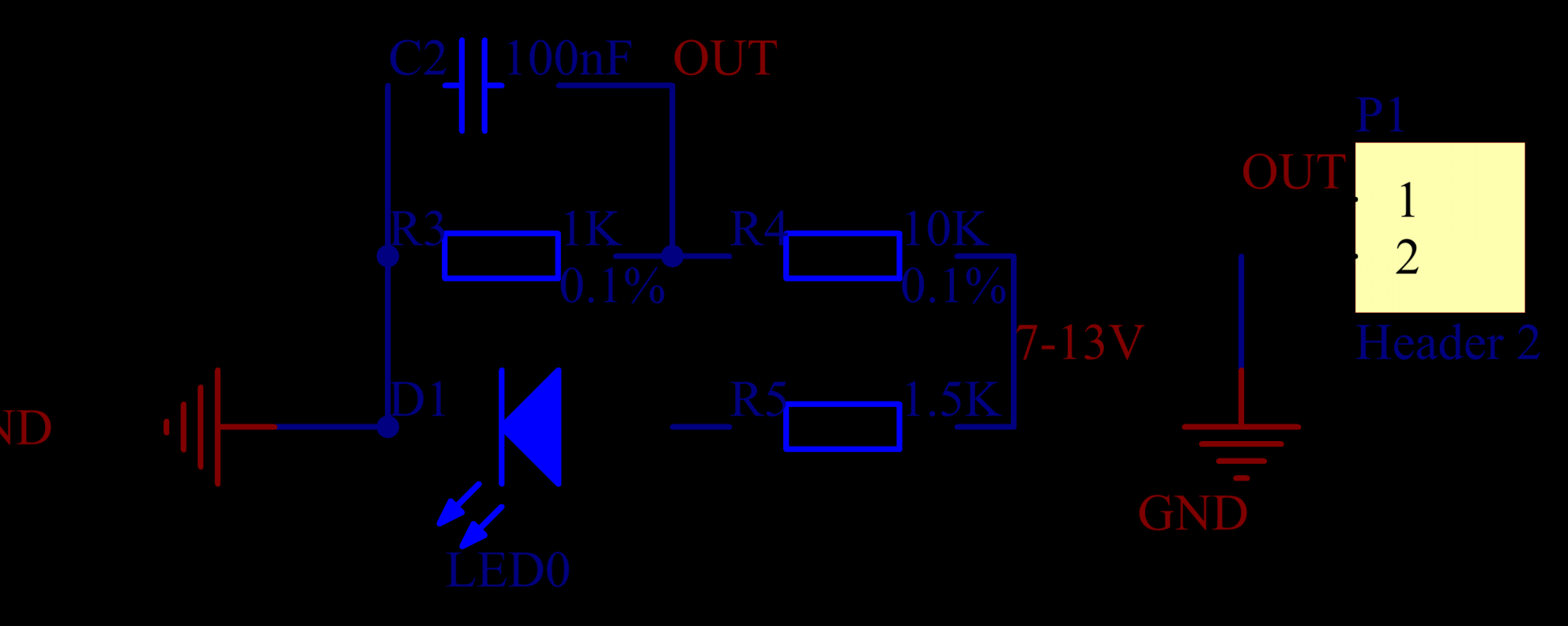
3.5电量测量模块 8
3.6 电机驱动模块 9
3.7超声波测距模块 10
3.8 外部Flash 11
3.9 显示模块 12
3.10 蓝牙模块 13
4系统软件设计 13
4.1 主程序设计 13
4.2 超声波避障程序设计 14
4.3 外部存储器读写程序设计 15
5 设计环境 16
6 实物图 17
7 总结 19
参考文献 19
附录 21
致谢 27
基于STM32单片机的智能小车的设计
庄玲
,China
Abstract:With the development of intelligent technology, the application of smart car will gradually become a popular trend. An intelligent car system based on STM32F103 microcontroller is designed in this paper, including Bluetooth module, ultrasonic module, rudder, external memory, electricity measurement, display module and so on. The Bluetooth module is used for the wireless control of the running mode, running direction and running speed of the car. The ultrasonic module is used for distance measurement and obstacle avoidance. The memory is used to store the running data of the car, and the OLED display display is used to display the parameters of speed and operation mode.This smart car can be used in the fields such as sweeping robots and warehouse freight transportation, one that has a certain practical value.
Key words:STM32F103 MCU;Bluetooth remote control;Obstacle avoidance module;OLED display;External memory
1 引言
1.1 研究背景及意义
21世纪以来,世界科技飞速发展,智能化发展成为主流。智能产品越来越多,也越来越多样,已经开始融入人们的日常生活中。智能小车应用广泛,在生活和军事国防上都有涉及,在生活中,小的方面主要体现在玩具车、扫地机器人、仓库搬运机器人等产品上,大一些的方面就要考虑到在汽车上的应用。科技实力能反映出国家综合实力的高低,现在,国内外越来越多人研究机器人,各种算法与技术层出不穷,而智能小车作为机器人的基础,它的研究与制作将有助于推动机器人和汽车业的发展,从而推动国家发展[1]。智能小车发展飞速,大多数都可实现循迹、遥控、避障、探测、自动行驶等功能。这几年,无人车的火热研发推动了智能小车的发展,也扩大了市场在智能技术上的需求。因此,各类关于电子的设计大赛层出不穷,不仅为学生提供了学习条件,同时,智能小车的技术也飞速发展起来。现在智能小车已经向声控方向发展,各大高校也开始参与研究,加上市场需求大,由此可见智能小车具有很大的研究意义。
1.2 国内外研究现状
上个世纪50年代初,美国研发成功了第一台AGVS系统,标志着国外智能车辆研究的开端[2]。80年代中后期,世界主要发达国家在智能车辆研发进步明显。比如NAHSC在美国成立。90年代后,智能车辆的研发越发火热。尤其是美国卡内基·梅隆大学,在智能小车方面的研究处于领先水平,完成了Navlab系列的10台自主车的研究[3]。现在国外智能技术越来越广泛的应用于制造业,越来越模块化和智能化,功能也逐渐趋于完善。除此之外,智能车还向着微小型方向发展,主打面向大众的服务型机器人。在美国,军事领域十分广泛的使用智能驾驶技术,智能车在该领域的已经能够达到精确侦察、精确探测雷点所在、参与救灾等紧急任务的水平,为军事管理提供了更大的方便[4]。
20世纪80年代,我国才开始智能车的研究,落后不止一点,当时处在的阶段还只是对单项技术进行研究,因此出现理论和技术不足,基础设施不全,资金分配不合理等问题。虽然国内外存在不少技术差距,我国要相对落后一些,但经过不懈努力,国内不少机构仍然取得了很多成果,如我国第一辆自主驾驶轿车以及军用室外自主车的研制成功,其中,军用车带有彩色摄像机等传感器[5]。
智能技术未来会应用到太空探索、无人车、日常管理、玩具以及各种移动设备上。智能概念广泛起来最明显的标志就是世界各地建设的科技馆,成人和儿童都可以去参观学习,推动了智能技术和产品的普及,提高了全民素质。
1.3论文的主要工作和章节安排
本系统设计的智能小车主要采用STM32F103作为主控芯片,具有无线控制、自动避障和固定路线行驶三种模式。使用蓝牙APP控制小车前后左右行驶,设置小车行驶速度,选择小车运行模式。使用超声波模块,在自动避障模式下用于避障。外加存储器可以连续存入舵机转角,即存储自动避障模式下小车行驶的路线。可以根据小车存储的路线数据,执行固定路线行驶模式。电压测量模块用于检测使用的锂电池的电量。显示屏可以显示出当前速度、电量等参数。
本文主要包括六章内容:
第1章引言。介绍本次设计的研究目的,研究背景,研究意义以及研究内容;
第2章本设计的系统总体方案介绍。介绍了系统的总体架构,经过方案论证,选用STM32F103C8作为主控,介绍了小车运行原理。
第3章是硬件电路的设计。包括单片机最小系统、稳压模块、电机驱动模块、舵机、外部FLASH、电量测量模块、显示模块、蓝牙模块、超声波模块等部分,并对模块进行分析并给出原理图。
第4章系统软件设计。对单片机控制模块功能的程序编写。
第5章设计环境。程序使用Keil MDK ARM编写,对Keil MDK ARM作出简单介绍。
第6章实物图。
第7章总结。
2 系统方案介绍
2.1系统总体设计框图
系统是基于STM32F103单片机的一种可实现自动避障、存储路线、蓝牙遥控、电压测量等功能的智能四轮车,由蓝牙模块、超声波模块、电机驱动模块、舵机、航模电池等组成。运行模式由蓝牙控制,在无线控制模式下,蓝牙可以遥控小车的行驶速度和方向;自动避障模式下采用超声波模块测距,然后系统根据距离判断是否转向,通过调节舵机控制脉冲的占空比改变小车行驶方向;固定路线行驶模式下的路线由外加Flash存储器保存,其数据为自动避障模式下的舵机转角;OLED显示屏用来显示速度、电池电量等信息。系统框图如图1所示。
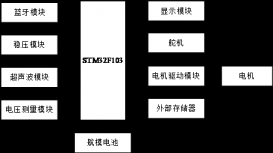
图1 系统框图
2.2 系统设计原理
2.2.1 舵机基本原理
舵机包含直流电机、电机控制器和减速器等。小车工作时,转向器里的角度传感器测出转动角度,控制板需要精确地控制这个转角,使它保持在一定误差范围内,这就是直流电机的闭环控制方式。单片机向电机发送控制信号(PWM信号)驱动电机转动,之后齿轮组缩小速度,缩小的倍数由齿轮大小决定,同时,输出扭矩被放大规定的倍数后输出;齿轮组的末级带动角度传感器一起转动,就可以测出转动速度;根据角度传感器的数值可以判断出舵机转动角度,得到速度和角度之后,就能实现单片机控制舵机转动[6]。舵机工作原理如图2所示。

图2 舵机原理图
假设舵机的控制脉冲是20ms一周期,脉宽范围是0.5ms~2.5ms,对应的舵机转角位置的范围是-90度~ 90度。则输入信号脉冲宽度对应的舵机输出轴转角如图3所示。因此,通过调节占空比可控制小车转向。
图3 舵机转角与脉宽对应图
2.2.2 后轮双电机差速控制原理
小车在转弯时,后轮的内轮和外轮行驶距离不同,行驶时间却相同,后轮之间存在差速问题,转弯的时候,内侧轮胎比外侧轮胎转速慢,因此,需要对左右两个电机进行差速控制。后轮双电机差速控制原理如图4所示,设舵机控制转角为Θ,车前进速度为v,前后轮中心距为L,后轮轮距为T,后转弯内侧轮速度为v1,后转弯外侧轮速度为v2,由运动关系分析得
 (1)
(1)
 (2)
(2)
 (3)
(3)
剩余内容已隐藏,请支付后下载全文,论文总字数:19439字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

