论文总字数:15777字
目 录
1.引言 1
1.1.研究目的和意义 1
1.2国内外发展现状和趋势 1
1.3本课题研究的主要内容 3
2.硬件电路的设计 3
2.1系统方案设计 3
2.2控制电路设计 4
2.3电源电路设计 4
2.4避障电路设计 5
2.5电机驱动电路设计 7
2.6红外遥控电路设计 9
3.扫地机器人的软件设计 12
3.1扫地机器人总程序设计 12
3.2主要功能模块程序设计 13
3.2.1避障程序设计 13
3.2.2红外遥控程序设计 14
4.扫地机器人系统测试 15
4.1避撞系统测试 15
4.2红外遥控功能测试 16
4.3清扫功能测试 16
5.结论 17
参考文献 18
附录 19
致 谢 21
简易扫地机器人的设计
王玉成
,China
Abstract:This article mainly designs and produces a simple intelligent robot. The robot will have functions such as automatic sweeping, automatic obstacle avoidance, infrared remote control and charging. This article introduces the overall design scheme of the simple intelligent sweeping robot system. It consists of the main control circuit of the single-chip microcomputer, the obstacle avoidance circuit, the car drive circuit, the side brush drive circuit and the infrared remote control circuit. The robot can complete the cleaning work independently, encounter obstacles in the cleaning process and can automatically avoid obstacles, and use the infrared remote control function to remotely control the cleaning robot.
Keyword: Sweeping robot;Obstacle avoidance;Infra-red;Singlechip
1.引言
1.1.研究目的和意义
在如今的社会科学技术不断地发展,社会面貌也在不停地进步,这引起了人们生活节奏的加快同时增加了人们的工作压力,这就使得人们希望摆脱繁琐的家庭日常清洁行为,同时也想利用工作之余做些自己感兴趣想要做的事情,比如出去游玩亦或者在家里好好休息等等,但家里的日常清洁也是必须要做的,这无疑是清洁机器人进入家庭的最大市场需求[1]。简单的扫地机器人可称为智能家居,它具有一定的人工智能,能够自己进行清扫工作,为人们提供了便利改善了生活,同时也提高了工作效率。如今的扫地机器人正以惊人的速度迅速发展并逐渐得到人们的认可得到了广泛了普及[2]。家家户户都已经使用上了各种各样的扫地机器人,市场的需求越来越大,面对市场的需求量越来越大,各国各公司正在努力地不断地研究扫地机器人技术使得机器人的技术也越来越强大越全面。今天,扫地机器人主要使用清扫,除灰和清洁地板等功能[3]。然而,随着科学技术的不断快速发展,这种简易清扫机器人已经不能满足人们的更高层次的需求了,人们的可支配收入越来越多对自己的各方面要求都提升了尤其是自己所处的环境。因此,需要逐步扩大扫频机器人的功能,以增加智能化核心技术的发展,如灭菌、自动充电、自动规划路径、导航和传感器融合[4]。从市场前景来看,自吸式吸尘器将在很大程度上降低人们的劳动强度,提高了劳动效率,适用于在多种环境下工作列如:家庭室内和公共场所的室内清洁。扫地机器人作为智能移动机器人的一种特别应用,从技术层面来说,智能扫地机器人完美的体现了移动机器人的一些很关键的技术,具有一定的代表性。因此,自主智能吸尘器的发展不仅在科学研究领域有着强硬的挑战性,而且在市场上具有良好的发展前景。结合现代传感器和机器人领域的关键技术,本项目旨在开发一种价廉、占地面积大、能完全满足家庭需要、便于应用的智能家居清洁机器人。 它可以取代传统的家庭手工清洁方法,让家居生活充满电气化和智能化,使科学技术更好地服务于人类。
1.2国内外发展现状和趋势
在国内的一些知名大学,也对清洁机器人进行了广泛的研究,例如哈尔滨工业大学、华南理工大学等这类被我们所称赞的大学。在他们的研究之后,机器人感知,机器人导航以及与清洁机器人相关的其他重要技术已经实现。离子、定位和路径。此后,人们对于清洁机器人的研究越来越频繁。对机器人的规划,控制,供电和电源管理,电力驱动等技术的研究逐渐增多。它为扫地机器人的研究、发展和推广打下了坚定的物质基础和技术基础。哈尔滨工业大学于20世纪90年代开始在这一领域进行研究,并与中国香港大学合作开发了一种全向移动式清洁机器人。该机器人具有以下特点:机器人使用全方位的移动技术,在狭窄地区等死亡地区执行清洁任务;采用开放式机器人铰链结构实现硬件可扩展性,软件可移植性和可继承性;利用智能机器人的技术来完善扫地机器人的功能[5],使服务载体具有较好的功能适应性;在拥挤的环境中实时避开障碍物可以更好地让扫地机器人适应不断变化的清洁工作环境;采用遥控操作和自主清扫两种运动模式来让扫地机器人工作既能体现智能化又能让使用者更好地体验;真空机器可以自动转换真空室并提高真空效率[6]。1999年初,浙江大学机电学院开始研究智能真空机器人。两年后,它成功地设计出了第一个自主式左右转向机器人。每当这种智能真空机器人开始工作时,它首先会对环境进行学习和研究并记录。利用超声波传感器距离测量原理测量物体与清洁机器人之间的距离,以反馈障碍物扫地机器人应对对策以实现与障碍物的一定距离[7]。当清洗角落时,它首先会获得房间的大小来计算出确定的清洁时间。然后,结合随机和本地遍历计划的策略被用来产生有效的清洁路径。结束后,利用红外感应装置找到并返回充电站补充电源。真空吸尘器机器人可以在5.5×3.5平方米的真实家庭环境中覆盖90%并且持续10分钟。大房间的清洁试验尚未进行。目前,该系统引入机器视觉和全球定位功能,提高了自我定位能力、智能化的决策能力,并且能够在多房间的复杂环境中清扫结束后返回充电并且提高了充电效率,最终达到提高清洗效率的效果。
世界很快就进入到21世纪,一个强大的信息时代。各国越来越多地研究机器人扫除技术,推出的产品性能越来越强大。紧接着很快第一款智能扫地机器人被推出,2002年伊莱克斯在原来的高质量的真空吸尘器的基础上,成功的研制出了一种名为“三叶虫”的清扫机器人——世界上第一台全自动扫地机器人[8]。然后,iRobot公司生产了Roomba,一个7代的家政机器人,并成为该领域的代表产品线。在2010年左右,在国内大量的涌现出一批属于我们自己的品牌的扫除机器人现并且快速发展起来逐步实现产业化。目前,在国内市场上有几十种受人们所喜爱并且广泛使用的清扫机器人品牌,如Coworth,Fortmart,德贝,海尔,美的,飞利浦和三星[9]。然而,拥有核心研发能力的本地清扫机器人公司的比例并不高。目前,清扫机器人拥有多项关键技术支持,并已完成定位,构图,计划和扫描的全面研究。从第一台扫除机器人开始发展到现在为止,扫地机器人系统正在慢慢地引入机器视觉系统和全球定位功能。这样做的目的就是为了提高扫地机器人的自我定位能力以及智能决策能力,并且提高在多种环境中的工作效率,最终提高清洁效率。如今的扫地机器人不仅可以适应复杂的家庭环境,而且还可以极大的提高清洁效果。
目前,清扫机器人的性能各方面已经得到了很大的提高,这也使得清扫机器人的发展前景变得非常好。现在是信息快速发展的时代。一方面,随着社会的发展经济的增长,整个社会进入到了快节奏的时代,人们生活的脚步也不得不加快,从而使得人们的工作压力也越来越大人们回到家中的疲惫感也越来越强。消费者希望摆脱繁琐的日常家居清洁工作,清扫机器人的出现使懒惰的人可以躺下来享受家务。
另一方面,随着国内城市化进程的加快和人民生活水平的不断提高,越来越多的年轻人成为城市消费的新兴力量。在消费者升级的背景下,清扫机器人正逐步成为家庭的新宠儿,而这些年轻人已经成为了消费的主力军。
同时,虽然智能家居尚未达到普及的程度,但市场仍保持着比较快速稳定的发展。今天的家用电器也变得更加智能化。新的家庭环境为智能家居产品带来了新的机遇,而扫地机器人自然就轻易地融入到这一大环境中。总体而言,在这样的大环境下在这样的机遇促使下,扫地机器人得到了广阔的发展空间[10]。
1.3本课题研究的主要内容
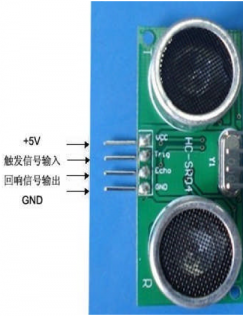
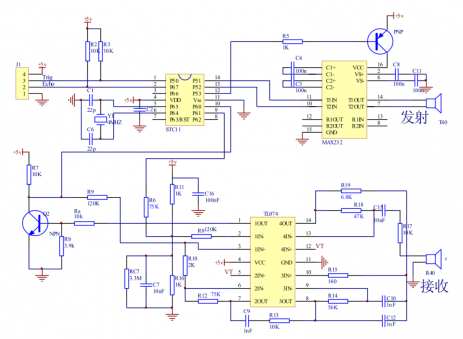
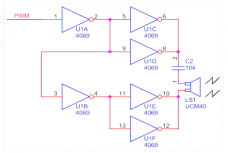
本课题主要设计了一种简易的扫地机器人,可以实现遇到障碍物自动躲避的功能,还可以通过遥控对扫地机器人进行远程遥控,能够自主的清扫地面。本课题采用超声波测距的原理来检测前方有无障碍物,然后将信息反馈给单片机主控中心,SCM处理信息然后发送指令来控制马达驱动的车轮以减少功能;采用红外线的特性对扫地机器人进行远程的控制,实现了对扫地机器人的可控性,增强使用稳定性,为用户带来了更好地体验感;利用电机驱动左右两个边刷和风机转动,边刷负责清扫风机负责吸尘两个同时工作达到清扫地面的效果。
2.硬件电路的设计
2.1系统方案设计
扫地机器人的功能需要包括自主清扫地面,自动躲避障碍物,能够进行充电,能够通过遥控远程控制。下面对扫地机器人的所有功能进行分析。
- 作为一个简易的智能扫地机器人,它首先需要的也是最基本的就是达到清扫地面的工作。此次的扫地机器人为简易的,所以就采用了简单的边刷组件,利用边刷将机器人前进路上的垃圾扫进机器人底部的收纳盒里。
- 扫地机器人与现在常见的家用智能清洁工具一样,必须能够在房间内自主行走,并且需要能够在遇到障碍物时自动避开障碍物。采用超声波测距能够方便自如的调节,使扫地机器人能够在自己所需要想要的距离下转向躲避开。同时对机器人的整体形状进行设计,将其做成圆形,另外在机器人前端底部加上一个滚珠,这样配合着超声波使机器人能够在房间里很好的规避障碍物,在房间里能够完美自如的行走,实现了机器人在房间多方位全面的清扫地面。
- 如今的信息时代,作为引领现代各方面潮流的新一代年轻人成为如今社会的消费主要群体。现在的年轻人除了想要每天工作之后回到家中可以放松放松不用去为打扫卫生而烦恼,还保留着一份爱玩的心。此时在扫地机器人上加上红外线控制模块,既能清扫地面解放双手,又给我们带来趣玩性,就像小时候玩的遥控汽车一样丰富了人们的生活。
- 利用简易的充电装置对扫地机器人进行充电,可以持久的使用扫地机器人[11]。
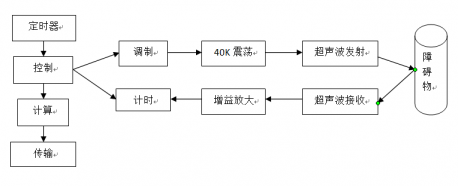
图1 系统方案框图
本设计采用了STM32单片机作为本次的控制中心,接收到其他部分传来的信号之后处理数据,然后发出信号返回到发出信号部位控制其做出反应。避障电路采用了超声波测距模块实时检测前方有无障碍物来进行转向达到避障功能;遥控电路采用了红外遥控电路,利用遥控器可以控制扫地机器人的前进左右以及控制扫地机器人开始扫地和结束;用两个电机驱动电路分别驱动轮胎和边刷风机,整个系统整合起来就实现了可以通过遥控控制能够自主扫地且带避障功能的扫地机器人。
2.2控制电路设计
STM32是最新一代cortex-M内核的芯片,它以ARM公司为基础,由于它的性价比超高以及具有简单的函数库编程方式,而被广泛采用。STM32系列32位内存微控制器采用的是Cortex-m3内核,该内核专为满足嵌入式世界的需求而设计,该嵌入式世界具有:高性能,低功耗和有竞争力的价格等优点。Cortex-m3增强了系统结构,从而使STM32收益无穷;ST公司有一个免费的软件包固件库,它可以让广大的使用用户轻松地访问STM32标准外设并且可以使用每个标准外设的所有功能。它的组成包含了微控制器所有外设的性能特征的例程,数据结构和宏。通过使用该固件库,用户可以轻松使用每一个外设,而且无需详细介绍。每个外设驱动程序都涵盖了所有的功能。STM32拥有工控领域的所有模块,列如:USB、AD等等。STM32系列为每个MCU用户提供前所未有的自由。为用户提供了一个新的32位产品选项,同时STM32具有高性能,低功耗,低电压等特点。同时,它保持了高集成度和易于开发的优势[12]。
剩余内容已隐藏,请支付后下载全文,论文总字数:15777字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

