论文总字数:22166字
目 录
摘要 I
Abstract II
1绪论 1
1.1课题应用背景 1
1.2本课题设计的主要内容和要求 1
2帆板控制系统概述 1
2.1 帆板控制系统原理 1
2.2 总体系统设计方案 2
2.3模块的选择 2
2.3.1 控制器模块 2
2.3.2 倾角传感器模块 3
2.3.3 按键模块 3
2.3.4 风机模块 3
2.3.5 电机驱动模块 3
2.3.6 显示模块 3
2.3.7 电源模块 3
2.4 实验可行性理论分析 3
2.4.1技术原理上的可行性 3
2.4.2在实验中的实现可行性 4
3硬件设计 4
3.1 MCS51单片机概述 4
3.2电机驱动概述 5
3.3风机模块概述 6
3.4 MPU6050概述 6
3.5 LCD显示电路 7
3.6 电源电路 8
3.7 键盘输入电路 8
3.8 蜂鸣器 8
3.9 I/O引脚配置 9
3.10 系统设备连接 9
4系统软件设计 10
4.1 软件开发环境介绍 10
4.2 系统软件总体设计 11
4.3 LCD液晶屏程序设计 13
4.4 IIC同步串行通讯的设计 13
4.5 卡尔曼滤波的设计 14
4.6 PWM波的设计 16
4.7 PID算法的设计 17
4.8 系统软件的设计 20
5系统实验及结果分析 20
5.1 系统设计规范化措施 20
5.2 系统实验实物图 20
5.3 实验结果及分析 22
6创新分析与改进 24
6.1创新分析 24
6.2实验中的不足 25
参考文献: 25
致谢 26
一种帆板控制系统实验设计
徐 秋
,China
Abstract:A sailboard system based on PID control, through the PID parameters with PWM technology to realize the closed loop system constant running. Closed-loop control system generally need to control motor actuator, but motor and its drive circuit is hardly accurate modeling. It is related to the loss of the motor and working temperature. Now, the general method to adjust PID parameters is experience, then combined with PWM technology to realize the closed loop system of constant running, different object setting of PID parameters is also different. The whole experiment involves synchronous serial IIC communication protocol, kalman filtering, the pulse width modulation based on double timer, the PID algorithm, no character LCD modulus and driver, the production of mechanical structure, etc.
Key words:PID control;Pulse width modulation;Sailboard system
1绪论
1.1课题应用背景
PID控制及PWM(脉冲宽度调制)技术广泛应用于工业闭环控制系统中,包括四旋翼飞行器、旋转倒立摆、智能小车系统、风力摆系统等[1]。闭环控制系统一般需要控制电机等执行机构,而电机及其驱动电路的传递函数一般很难精确建模,这与电机的耗损、工作温度等有关。目前一般通过经验的办法来调整各个对象的PID参数。
PID控制器最早出现在1930年左右,从问世至今已经80几年。它具有结构好,稳定性很好,工作性能可靠,调整非常方便等多重优点,因此PID控制已经成为工业控制的主流技术之一。在经历了这几十年的不断更新换代,PID控制得到了迅猛的发展。特别是今年来,随着数字技术的出现和不断的发展,PID控制也出现了数字化PID控制。同时也出现了非常多的新型PID控制算法和方式。比如,非线性PID控制,自适应控制,最优控制,预测控制,鲁棒控制和智能控制等等[2]。本实验中选用增量式PID算法,来实现帆板角度的自动跟踪。
1.2本课题设计的主要内容和要求
为了更好完成实验设计,整个实验由易到难分三步来完成:第一步,手动掀起帆板,通过传感器MPU6050来完成倾斜角度的测量,同步将角度信息显示在屏上;第二步,通过矩阵键盘对风机进行调速,达到帆板角度变化目的,观测风机的非线性和最大吹起角度;第三步,通过按键设置帆板倾斜角度,单片机通过PID控制算法来对风机进行自动调速,实现帆板保持在设定角度位置。
本课题的主要设计任务如下:
(1)设计PWM波的产生系统。
(2)设计PID控制算法。
(3)设计IIC同步串行通讯和卡尔曼滤波。
(4)设计系统的LCD液晶显示模块。
(5)设计整个系统的电源部分。
(6)设计系统的按键输入模块。
2帆板控制系统概述
2.1 帆板控制系统原理
本实验一个典型的闭环PID控制综合实验。所谓闭环系统结构也叫反馈控制系统,典型的闭环控制系统通过传感器来得到被测对象信息,再将获得的信息与人机接口设置的目标信息进行对比,由此产生一个偏差信号,利用此偏差信号来调节控制执行器的动作,实现被测对象的恒量输出,使输出值尽可能的靠近期望值[3]。本实验中的主要器件和模块包括获得被测对象信息的传感器、主控单元MCU、执行器、人机接口、显示设备和电源模块。为了实时了解和方便观测被测对象信息,显示设备必不可少。电源模块负责给各部分模块分别供电,整个系统的结构如图1,没有给出电源跟其他模块的连接关系。
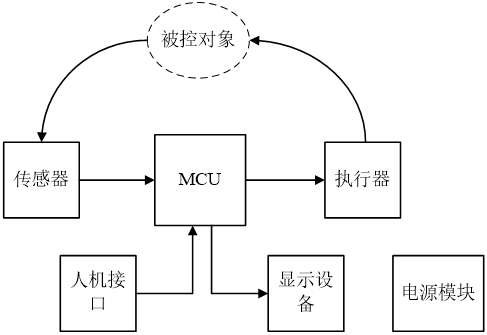
图1 典型闭环控制电子系统结构框图
2.2 总体系统设计方案
本实验结构原理框图见图2,被控制对象为简易帆板,主控制器为MCS-51单片机,传感器为倾角传感器,执行器为直流轴流风机,人机接口为矩阵按键,显示设备为无字库LCD屏,由于各个器件工作电压的不同,电源应该同时具有 12V和 5V两种输出,实验完全切合图1的典型闭环控制系统结构。
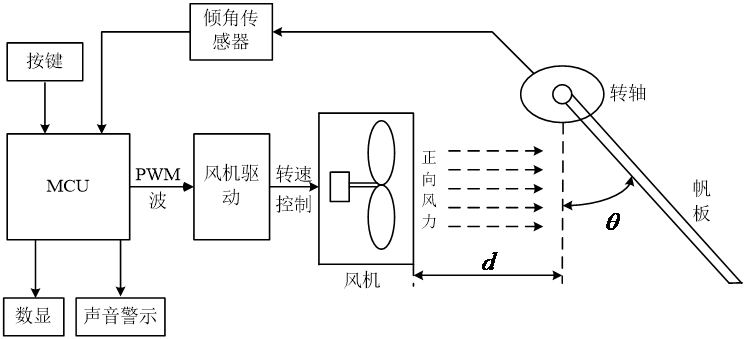
图2 帆板控制系统框图
2.3模块的选择
2.3.1 控制器模块
控制器是指挥各个部件按照指令的功能要求协调工作的部件,是整个系统的指挥中心。在本次试验中,选择传统的MCS51单片机为主控制器。MCS51单片机有着成本低廉,历史悠久,参考资料较多,获得资料的方式容易等多重的优点,而且,自该系列单片机产生以来,一直都占据着相当大的市场份额,这个现象也间接地反映出了MCS51单片机的性价比非常高。MCS-51单片机内部有多达3个定时/计数器,通过定时器的输出切换就可以实现PWM波(即脉冲宽度可调方波),以弥补MCS-51单片机没有专门的PWM模块电路的缺点,这也是本实验的创新点之一。本实验中采用的MCS51单片机型号为STC90C58RD 。
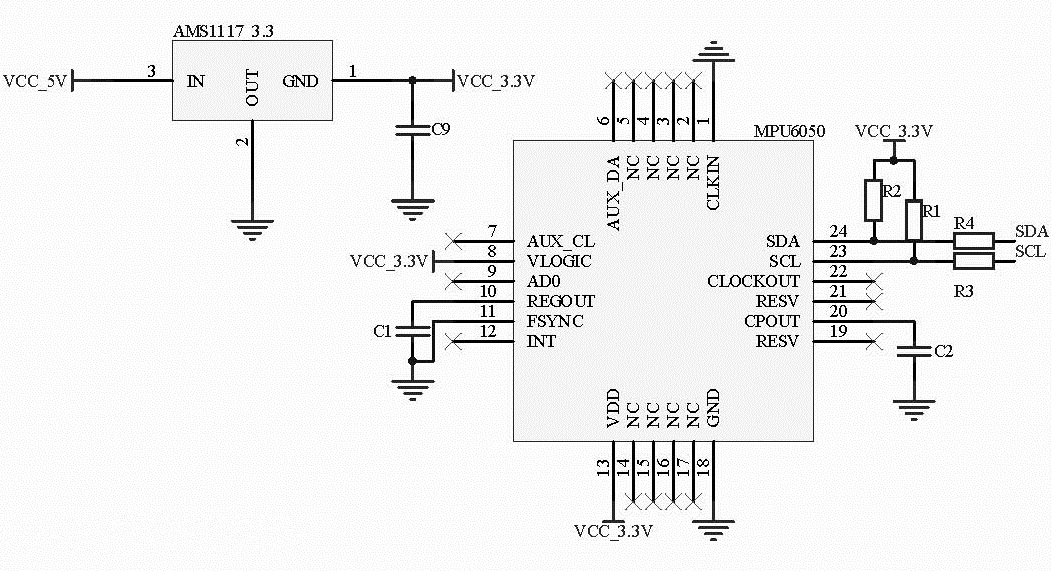
2.3.2 倾角传感器模块
倾角传感器可以得到帆板倾斜的角度,然后将角度传送到单片机中。一般微机械电子传感器获得倾角的方法均是对重力加速度进行分解,得到沿纸板方向的加速度和垂直纸板的加速度,将这两个方向加速度的相除,得到的比值就是帆板倾斜角度的正切值,由此比值再通过三轴加速度值的串行读取及转换就可以得到帆板的倾斜角度。在本实验中选取MPU6050模块来获取角度。在实际应用中,发现模块自重过大,因此将该模块内部核心取出,通过胶水固定在帆板上,以减小实验误差。
2.3.3 按键模块
为了实现角度设定和风机转速的调节,因此需要在实验中引入按键模块,由于输入值为0到99,因此必须至少要有10个按键可供使用,综合适用性和便捷度,采用4X4矩阵键盘(DA402)来实现加或减操作,以及实现直接的数字调整。
2.3.4 风机模块
由于实验中要尽可能将帆板吹起较大角度,因此风机的功率也应该较大,综合考虑发现在实验中选择额定电压为12V,额定电流为1.3A的风机获得的吹动效果比较理想。
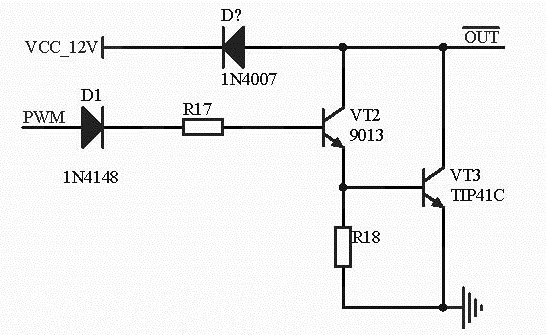
2.3.5 电机驱动模块
实际可供选择的电机驱动很多,但由于实验中选择了电压12V,额定电流为1.3A的风机,因此选择了宽电压范围的NPN三极管驱动模块以满足12V电压的要求。
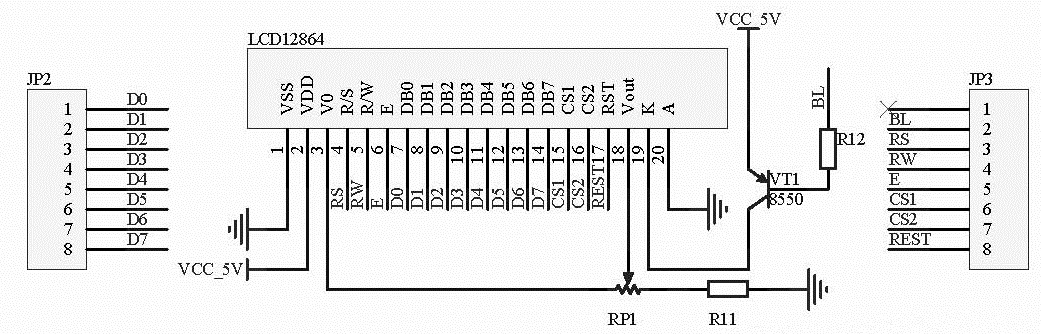
2.3.6 显示模块
本实验中由于显示汉字较少,考虑到成本原因,选择利用传统无字库LCD12864作为显示模块来实现对实验中需要的数据和汉字的显示。由于选择的模块无字库,因此在显示汉字时要通过网络上的取模软件来获得字模的数组信息,以达到显示汉字的目的。
2.3.7 电源模块
本实验中由于各模块所需的额定工作电压不同,一共需要5V和12V两种电压输出,因此实验选择DYM315电源模块来为整个系统供电。
2.4 实验可行性理论分析
本实验项目无论从技术原理还是实物实现方面来考察,均是可行的。
2.4.1技术原理上的可行性
系统中的帆板两端通过软质导线或轻质套杆固定,在直流风机的正向吹动下,帆板会产生相对自然下垂位置的角度,角度的大小与直流风机的转速、功率、帆板自重、正向面积等有关。而风机的驱动,其实就是单向的直流电机,通过单片机输出占空比可变的方波给电流放大驱动电路就能实现电机的驱动。对帆板倾斜角度的测量,可以有很多传感器来实现,比如MMA7361、MPU6050等,这些微机械电子传感器均是对重力加速度进行分解,得到沿纸板方向的加速度和垂直纸板的加速度,这两个方向加速度的比值就是帆板倾斜角度的正切值。通过三轴加速度值的串行读取及转换就可以得到帆板的倾斜角度。尽管MCS-51单片机没有专门的PWM模块电路,但是却有多达3个定时/计数器,通过定时器的输出切换就可以实现脉冲宽度可调方波的产生。对于角度设定和风机转速的调节,采用矩阵键盘,按键可以实现加或减操作,也可以实现直接的数字调整。在本实验中显示的字符和汉字信息很少,所以汉字取模的存储空间并不会超过单片机的存储容量。
2.4.2在实验中的实现可行性
本实验除开帆板需要设计以外,其他的模块实际均无需设计。倾斜角度传感器采用MPU6050模块,在实际应用中,发现模块自重过大,就将内部核心模块取出,通过胶水固定在帆板上;直流轴流风机采用DYM505模块,由于普通12V/0.1A的风机,功率过于小,吹起的帆板角度小于5度,在实验中选择了相同额定电压,额定电流为1.3A的风机;可供选择的电机驱动很多,但考虑到风机额定电压为12V,所以本实验选择了宽电压范围的NPN三极管驱动模块。矩阵按键采用DA402模块,数字显示采用了无字库LCD12864模块,主控采用MCS51单片机模块,实际选用29个引脚,还多出3个引脚未利用。由于系统的电源部分采用的稳压芯片,如L7812CV,L7912CV,L7805CV,L7905CV,输出最大电流为1.5A,能满足本实验需要,也选用自带的12V和5V开关电源。另外,本实验还需要数字万用表和示波器辅助测试,一般实验室均配有。
3硬件设计
3.1 MCS51单片机概述
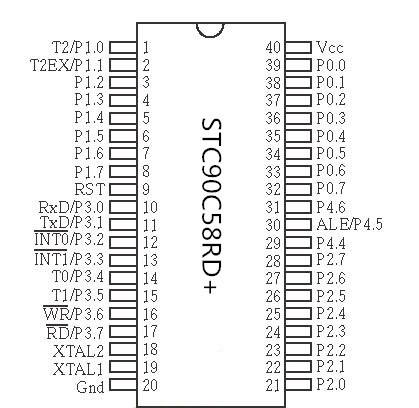
MCS51单片机是美国英特尔公司生产的一系列单片机的总称,这一个系列中的品种非常丰富,比如8031,8051,8751,8032,8052,8752等,其中8051是该系列中历史最悠久并且最典型的产品,其他的单片机都是在8051单片机的基础上通过功能的增,减和变化演化而来的,也因此大家都习惯于用8051来称呼MCS51系列单片机[4]。后来,英特尔公司将MCS51的核心技术授权给了很多其他的公司,比如STC等。所以,现在除了英特尔公司以外,也有非常多的其他公司和厂商再生产以8051为核心的单片机,而功能也会根据不同市场的不同要求产生不同的变化。在本次试验中,选取了有英特尔授权的STC公司生产的具有PDIP-40封装的STC90C58RD 单片机。
STC90C58RD 单片机是STC生产的新一代超强抗干扰/高速/低功耗的单片机,是STC STC90C51RC/RD 系列中的一员,它的工作温度范围为0 到75℃,工作电压在3.3V到5.5V之间。STC90C58RD 单片机工作频率虽然一般仅限于0到40MHz,但却相当于普通8051单片机工作频率的0到80MHz,同时,STC90C58RD 单片机在实际工作时频率最高可以达48MHz。在存储空间方面,STC90C58RD 单片机中的用户应用程序空间为32K 字节,同时片上还集成1280字节的RAM,只需通过串口(RxD/P3.0, TxD/P3.1)连接下载器直接下载用户程序,数秒即可完成单片机的烧写。同时该芯片还拥有有 EEPROM,看门狗以及通用异步串行口(UART)功能。
剩余内容已隐藏,请支付后下载全文,论文总字数:22166字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

