论文总字数:15382字
目 录
1绪论 1
1.1论文背景 1
1.2系统的主要功能介绍 2
2系统总体设计 3
2.1系统总体设计框图 3
2.2设计思路 4
3硬件电路的设计 6
3.1MSP430F149主控芯片 6
3.1.1主控芯片的简介 6
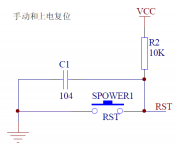
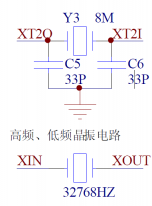
3.1.2最小系统 7
3.2超声波测距模块 9
3.2.1设计的任务 9
3.2.2超声波测距的基本原理 9
3.2.3 HC-SR04超声波模块的原理与使用 10
3.3小车驱动模块设计 12
3.3.1设计要求 12
3.3.2L298N电机驱动模块的简介 12
3.3.3 驱动电路的设计 14
3.4 显示单元 15
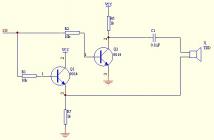
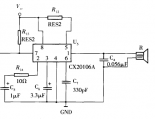
3.5报警模块 17
3.6矩阵键盘 17
4系统软件设计 19
4.1 测距单元软件设计 19
4.1.1 软件设计 19
4.1.2 误差软件修正 20
4.2 驱动调速单元软件设计 20
4.2.1 PWM调速的软件实现 20
5总结与展望 22
5.1 设计技术上的优缺点 22
5.2 发展趋势 22
结束语 23
参考文献 24
致谢 25
附录 26
倒车防撞感应系统
王菲
,China
Abstract: With the rapid advancement of society, people's consumption level also increased every year. Especially in the transport sector, purchases of cars is also rising year by year, cars bring convenience to people at the same time, the attendant also led to a variety of problems, such as columns, automobile congestion, drunk driving and so on. The car crash congestion can bring butt, hit, etc, leading to casualties and property losses. The car crash sensing system design is designed for this situation.
The core of this design is MSP430F149 monolithic integrated which is the main control component . The car away from the obstacle of distance is obtained by ultrasonic module . The distance can be displayed through the 12864display screen. When the small car away from the obstacle of distance is less than the safe distance ,the alarm .Then we control the small by keyboard.
Key word: MSP430F149 monolithic integrated; ultrasonic wave modules;12864display screen;the alarm modules; small car
1绪论
1.1论文背景
当今时代社会在进步,经济在发展,由于汽车的便利,汽车也成为人们生活当中的必需品。伴随的汽车的销售量逐年上升,一些公共场所,列如:公路,停车场,车库,等也变得街道也变得拥挤不堪,留给汽车可挪动的空间也越来越少[1]。再加上公路上的新手越来越多,他们对倒车技术不熟练,加上可挪动的空间很小,所以由于倒车所引发的纠纷也屡见不鲜。倒车时在没有提醒的情况下,汽车很容易撞上车辆,行人,墙壁等障碍物。这样所引起的经济损失数额巨大。据统计,在交通事故中,倒车事故在交通事故中所占比例,逐年有上涨趋势,从2002年到2010年每四年统计一次,分别为百分之二十一,百分之二十八,百分之三十。据此可见,倒车已经让一些老司机抱怨费神,更别提那些年轻的司机,他们面临倒车更是头痛。
倒车时容易发生事故的起因是:在倒车的过程中,汽车后面的障碍物司机是无法看清的,这样就会发生撞车事件。这是由于,视觉盲区的存在。在这种情况下,刮到其他的汽车,撞上行人,甚至是撞上墙也是不足为奇的。当汽车要驶入规定好的车位时,假如,驾驶员不小心,撞上石块或者是桩基,常常会导致车后的灯,消音器损坏,车上的油漆被刮掉也是预料中的事情。汽车倒车不仅需要驾驶员有足够的经验,驾驶员的灵敏的反应能以以及熟练地驾驶技巧也是必不可少的。这几项要求每个司机必须具备,如果哪一项出现了问题,汽车就不能快速准确的停到某一指定的车位中去。
所以人们一直在渴望有一种装置能解决倒车给他们带来的问题。与此同时大家也在追求一种操作简单,使用安全,消除倒车所带来的不安全因素并且价格廉价的产品,根据这些要求目前主要有两大考虑的方向,一种是伴随着汽车越来越智能化的步伐,通过改进自动驾驶技术以及汽车配套设施可以达到这样的要求。可是由于这一技术然在研发阶段,很不成熟,要想达到大家期待的样子还要很长时间,短期内无法实现。第二种思路是:根据统计情况来看,在发生事故的一部分原因是由于驾驶员的反应不够灵敏,如果在危险将要发生时给驾驶员一定的预处理时间,一般只需要30秒的时间,这样就会使事故的发生率降到原来的百分
之七十。所以只要简单地汽车倒车报警装置就可以轻易地解决当前的窘状。传统的倒车装置一般是通过语音来提示汽车要倒车,大部分还要求驾驶员通过后视镜来判断障碍的方位及离汽车的距离,然而,这个只是个估计值,不能提供驾驶员确切的消息。为了减少由此带来的不便,需要有一种装置能确切的定位障碍物的位置以及与反映出汽车与障碍物的距离,由此便产生了“倒车雷达”[2]。
“ 倒车雷达”是倒车防撞雷达的简称,有时也将它称作泊车辅助装置。它是在汽车停车或者是倒车过程中所发挥作用的确保安全的辅助装置。这项产品作用是:一检测后方有无障碍物。二测量出汽车与障碍物的距离。每个产品都有其发展的历程,该系统也是如此。在发展的初级阶段,该模块只能测试出一定距离内的障碍物然后发出警报。在中级阶段,汽车可以根据不同的阶段进行分段报警。其实这两个阶段都是采用的雷达都是集成的,只能实现简单的功能不能随心所欲的进行控制。而现阶段所使用的雷达是可以控制的,而且价格低廉。这主要得益于单片机市场的发展使单片机变得廉价,以及电子系统逐渐趋于网络化。现阶段的倒车雷达以单片机为核心控制中心,可以实时的测量汽车与障碍物的距离,与此同时通过显示屏实时的显示出来。当小车与障碍物的距离小于安全距离时可以发出警报,这样可以提高司机的警惕性。这些功能可以帮助驾驶员了解后面的情况,可以提高汽车倒车时的安全性。
本设计所利用的超声波的起源是在黑夜里,蝙蝠在空中飞行时,没有与障碍物相撞二得出来的。超神波具有以下几个特点:一超声波具有很好的指向性。二在空中传播时超声波的能量损耗少,所以容易接受到信号。三当超声波遇到障碍物时,就会反射回来,超声波不像其他的波,一般的声波反射回来的能量很小,可是超生波反射回来的波跟发射出去的波能量差不多。这是利用了这一特点,本设计将超声波程序输入到单片机MSP30F149单片机中,以该单片机为核心控制元件,通过单片机来控制超声波收发装置,当小车进行倒车时单片机就控制超声波模块发射超声波,同时单片机打开自身所携带的定时器,该定时器的作用是:计算超声波遇到障碍物以及反射回来的波被超声波接收装置接受之间的时间t。当超声波接受装置接收到超声波的反射波时,单片机就会计算出小车与障碍物之间的距离,根据公式s=(340*t)/2,计算出距离。同时把该距离通过12864LCD液晶显示屏显示出来,假如小车与障碍物的距离小我们预先设定好的安全值时,这时单片机就会控制蜂鸣器使蜂鸣器发出警报声,以此来提醒司机要提高警惕,该系统为了模拟汽车倒车的情形,我们自制了一个遥控小车,用它来模拟,当蜂鸣器发出警报时,我们就通过键盘来控制小车刹车。
1.2系统的主要功能介绍
本次设计的倒车防撞系统,设计的核心是以MSP430F149单片机为核心控制芯片。通过该单片机可以控制超声波收发装置,12864LCD显示屏的显示,矩阵键盘,报警系统—蜂鸣器。该单片机还可以通过控制小车驱动—L298芯片来控制小车的直流驱动,通过程序可以实现小车的前进、后退、向左转、向右转以及刹车。该设计只用到了小车的后退与刹车。
2系统总体设计
2.1系统总体设计框图
根据我们要设计的功能,本设计主要由下面几个模块组成。一主控模块。二超声波收发装置模块。三12864LCD显示模块。四 报警模块。五小车模块。
本次设计的倒车防撞系统,设计的核心是以MSP430F149单片机为核心控制芯片。通过该单片机可以控制超声波收发装置,12864LCD显示屏的显示,矩阵键盘,报警系统—蜂鸣器。该单片机还可以通过控制小车驱动—L298芯片来控制小车的直流驱动,通过程序可以实现小车的前进、后退、向左转、向右转以及刹车。该设计只用到了小车的后退与刹车。
系统功能模块框图如下图所示:

图2.1 功能模块图
系统的总体结构框图如下图所示。
12864LCD显示模块
蜂鸣器报警模块
小车模块
矩阵键盘模块
MSP430F149单片机核心控制模块
超声波发射模块
超声波接受模块
图2.2 系统总体框图
2.2设计思路
本次设计的基本设计思路简单的概括如下。
打开按钮,小车进行后退的过程中,这时通过主控芯片MSP430F149单片机向超声波发射装置端口发送脉冲,脉冲的宽度为20us.超声波发射装置的端口是Trig..这时超声波发射电路就会发射出超声波。超神波是频率大于20khz的声波。该设计用的超声波频率为40KHZ.
在超声波传播的工程中假如没有遇到障碍物小车就继续后退。在单片机向超声波模块发送脉冲时,这时单片机打开了它内部的定时系统。当发射出去的超声波遇到障碍物时,超声波就会进行反射。从而形成反射波。形成的反射波会按照原来的途径进行传播。当超声波模块的接收端接收到同频率的超声波时,这时超声波模块就会通过端口向单片机发射一信号。该端口为Echo端口。该信号为一个高电平。当单片机接收到该信号时就会停止定时系统的定时。然后根据公式S=170/T算出距离。然后,将单位米化成以厘米为单位的数值。最后,通过显示模块12864显示器将这一距离显示出来。
剩余内容已隐藏,请支付后下载全文,论文总字数:15382字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

