论文总字数:19372字
目 录
1绪论 1
1.1研究背景 1
1.2研究目的和意义 1
1.3 研究现状 1
1.4 论文的组织结构 2
2系统的方案设计 2
2.1 系统的总体设计 2
2.2 系统达到的预期效果 2
2.3 系统的各模块选用与论证 3
2.3.1 底板的选用 3
2.3.2 升降杆的选用 3
2.3.3 载物平台的选用 4
2.3.4 开发板的选用 4
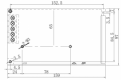
2.3.5 开关电源的选用 4
2.3.6 其他小模块的选用 6
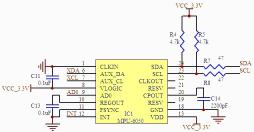
2.3.6.1 传感器的选用 6
2.3.6.2 电机驱动模块的选用 7
3系统的硬件设计 8
3.1 STM32F103ZET6开发板详述 8
3.2 系统整体搭建与调试 11
3.2.1 电机驱动模块的设计与安装 12
3.2.2 双组开关电源的安装调试 13
3.3 系统整体硬件实物图及分析 13
4系统的软件设计 14
4.1 主程序流程图 15
4.2 手动调整上平面水平功能软件设计 16
4.3 自动调节水平功能软件设计 17
4.4 卡尔曼滤波算法 17
5数据分析及结论 19
5.1 测试的数据 19
5.2 数据的分析及结论 20
6设计总结 21
6.1 对设计的小结 21
6.2 设计的待改进反面及构想 21
参考文献: 21
致谢 23
基于STM32的自平衡系统
周建华
,China
Abstract:This paper introduces an automatic balancing device, which has the function of regulating the level of the platform automatically.The system uses STM32 minimum system development board as the core and foundation, it is the nerve center of the whole system, and whether the other parts of the system can work in harmony, should obey its instructions. When the floor platform in a certain range of tilt, the program can be written by the microcontroller to adjust the lifting height of the lifting rod, so as to achieve the above has been maintained at the level of the function of the table. The device uses the Calman filtering algorithm to optimize the data acquisition, so that the maximum amplitude of the lifting rod can be close to the true tilt height of the bottom surface. Using L298N motor to drive the lifting rod can make the lifting rod more stable. The biggest advantage of this device is that it is very practical.
Key words:STM32; self balance; Calman filter; L298N
1绪论
1.1研究背景
在这个科技发达的时代,电子元件的运用越来越多,这就使得电子器件的发展和优化越来越快。以STM32等微型单片机为核心的仪器也越来越多,从小到生活中常见的智能家用电器到未来智能城市的一整套智能设施等,都依赖于发展飞快的电子技术。在自平衡这个研究方面,研究自平衡系统的专家学者们很多,现有的研究方向大多以自平衡小车为主。两轮平衡车通过姿态检测系统来实时检测车身姿态及运动状态,并根据姿态信息对小车进行控制[1]。实现的功能主要是以MPU6050陀螺仪作为传感器来模拟人们的感觉器官,并将采集到的模拟信号转化为数字信号传递给处理器,而且由于采集处理后的数据含有噪声等干扰因素,所以还要经过卡尔曼滤波进行优化处理。自平衡小车具有两个可独立旋转的车轮,包括用于每个车轮的驱动电机,并且具有前后自平衡能力[2]。装置的功能虽然和本平衡系统不同,但是其中所蕴含的原理都是基本一致的。本装置实现的功能主要是自动调节载物平面的水平状态。大致实现方法是将陀螺仪采集到的信息交给单片机分析,然后单片机下达指令给升降杆让其按照程序进行升降操作。本装置和现有的研究在用到主程序方面都有很多相同的地方。
1.2研究目的和意义
自动化的装置在日常生活中非常普遍,上世纪开始的电气化时代的飞速发展,使得带有微型芯片智能控制的系统工具在日常生活中随处可见。这些装置的出现以及高速发展极大地方便了人们的生活,使一切都变的简单快捷,本装置也是同样的,依靠以STM32为核心的单片机微型芯片来控制,通过预先载入的程序控制语句,可以实现完全自动调整载物平台平衡的功能,整个控制实现过程具有耗时短、稳定性好、简洁易操作、经久耐用等系列特点。本次研究也具有非常重要的实际意义,可以应用到实际的生活设施中。
1.3 研究现状
当前对于平衡系统的研究。国内外许多专家教授都在这方面有过很深的研究,现有的研究内容已经非常深入细致了,系统所能到达的预期效果也是非常可观的。而且当前的研究不仅涉及自平衡系统,而且还研究了自平衡小车。所述自平衡装置包括控制器、陀螺仪和压力传感器[3]。但是,现有的研究仍然存在待改进的方面和事项。就比如自平衡小车,现有的研究考虑的主要是如何实现两轮车的平衡,其中的关键是保持车头的平衡,再结合车速来保证车能平稳前进,然而用电子仪器来实现该过程需要考虑的因素更多。由于电子器件的传输数据过程会随着元器件的灵敏度有时间上的差异,不能及时做出判断和相应的动作,所以平衡起来可能会有很大的难度。当然现有的研究也都考虑到了这些问题。在自平衡载物平台系统方面,现有的研究还没有相关记录。
1.4 论文的组织结构
本篇文章的结构主要是根据设计的硬件实物图以及能够实现的功能来叙述和论证的,大体结构是先在绪论部分叙述了与之相关的一些研究,然后在第二章分析论证了各器件模块的选用,其次在第三章和第四章分别分析介绍了硬件和软件部分的设计,最后在最后两章还分析记录了测试数据和论文总结。
2系统的方案设计
2.1 系统的总体设计
首先按照所要实现的功能搭建所需要的各个模块,按照之前所预想的功能把各个模块连接起来。其中,推杆是连接底部和载物平台的重要部件,是整个系统最核心的模块。底部和推杆的连接方式是先用电钻在底部平台的四个角各打一个孔,然后将推杆用胶水固定在洞里;载物平台和推杆是用可活动部件螺丝连接的。陀螺仪安装在载物平台的正中心来检测平面是否水平。其它部件用杜邦线连接在一起。
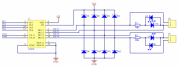
整个系统功能的实现过程:首先给整个系统供电,然后调节开发板的按钮。开发板按钮功能共分为3层。第一层所能实现的功能是自动平衡,也就是载物平台在水平状态时,倾斜底板平台,载物平台会随之倾斜,这时陀螺仪感受并传递倾斜状态给开发板,单片机此时就会按照预设的程序来吩咐升降杆按照倾斜的对应来升降,达到使载物平台水平的功能,在传感器再次探测到载物平台水平后,整个系统就会暂时停止工作;第二层按钮和第三层按钮都是手动调节载物平台水平状态的。自平衡系统是一个非常复杂的不稳定动态系统,需要进行平稳调整[4]。整个实现过程的框图如下。
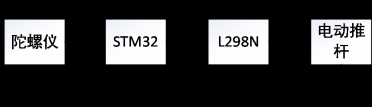
图1 整个系统框图
2.2 系统达到的预期效果
经过大量的文献阅读和分析,再结合本系统的特点,本装置能到达的状态是会令人满意的。经过查阅发现,自平衡控制系统是一个高阶次、非线性、不稳定的系统[5]。但是由于本装置的电机驱动模块很稳定,所以整个推杆的推进上升下降过程理论上是会很平稳的;然后本系统的软件部分还引用了卡尔曼滤波算法,这将使得陀螺仪采集到的数据信息也就是载物平台的平衡状态信息将会最大程度上接近载物平台真实的倾斜状态信息,这就给开发板提供了最为可靠的数据信息。最后整个系统的硬件搭建完全是由自己精心准备的各模块借助实验室专业工具搭建而成。所以本系统应该能达到很好的自平衡状态效果。
2.3 系统的各模块选用与论证
2.3.1 底板的选用
底板的选用需要符合下列条件。第一是硬度,由于底板需要承载整个系统,所以如果不够坚固,整个系统就会不牢固;第二个条件就是要易于打孔操
作,由于电动推杆是连接固定在底板上面的,所以需要在底板上面相应的地方打上比推杆底部大的孔以固定电动推杆,所以在底板硬的同时需要易于打孔;第三个条件就是考虑到整个系统的轻便性,所以底板的选用也不宜过重;最后一个条件是考虑到实际经济情况,所以选材的价格不宜太贵。综合以上四个条件,最后选用木板作为底板的材料。
2.3.2 升降杆的选用
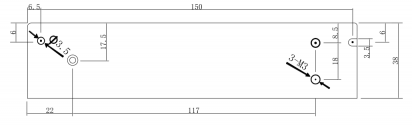
升降杆作为本系统的基础核心硬件,该部件的性能将直接决定整个系统的平衡精度,其在STM32程序控制下能够使目标平台实现自动平衡。按照硬件的要求以及它所需要实现的功能,升降杆的选择大致需要符合以下几点:
底座插孔:由于本设计是将升降杆的底部部分嵌入在木板里面,以此来连接木板和升降杆以及固定升降杆,所以升降杆的底部首先在长度上要比木板的厚度小,而且要和木板上钻孔的深度匹配,其次是要升降杆底部要易于固定在木板上。
- 升降杆伸缩长度和时间:考虑到底部木板的大小以及载物平台的尺寸,所以升降杆所能达到的最短距离和最高长度都应该和整个系统匹配,若升降杆的最高长度太大的话可能会导致整个系统不稳定,也就是载物平台的平衡性会下降,这就违背了系统所要实现的自平衡这一功能特点。还有升降杆升降所需要的时间也是非常重要的,这个总的时间必须是越短越好,时间越短,控制将会更灵敏,自平衡效果更好。
- 引线长度:由于升降杆的引线是单片机和升降杆之间进行通信的重要通道,所以引线至关重要,而且引线的长度可能会影响通信时间变长等问题,也就是延迟会很明显。
综上所述,最终选用的升降杆及参数如下图:

剩余内容已隐藏,请支付后下载全文,论文总字数:19372字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

