论文总字数:30129字
摘 要
Abstract II
第一章 绪论 1
1.1. 引言 1
1.2. 水声信号仿真系统结构 1
第二章 噪声信号仿真 3
2.1. 所仿真的噪声信号的种类及特征 3
2.2. 平稳连续谱分量的仿真 6
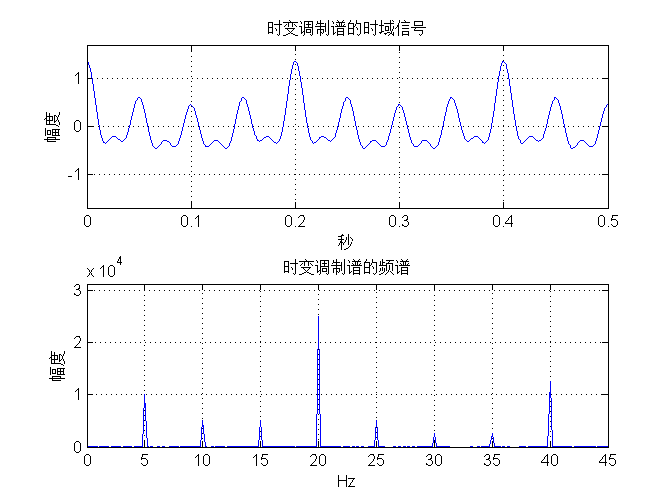
2.3. 时变调制谱分量的仿真 10
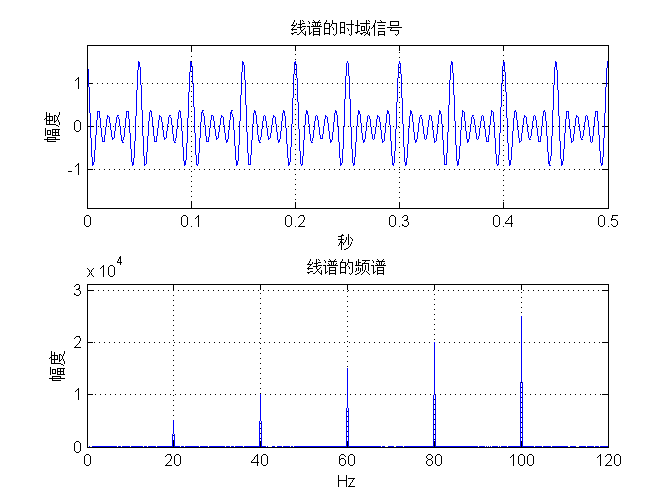
2.4. 线谱分量的仿真 11
2.5. 本章小结 12
第三章 脉冲信号仿真 14
3.1. 脉冲信号的分类和表示 14
3.2. 脉冲信号的时频分析 16
3.3. 本章小结 20
第四章 水声目标运动轨迹仿真 21
4.1. 水声目标运动特点 21
4.2. 水声目标运动轨迹仿真方法 21
4.3. 本章小结 25
第五章 海洋信道仿真 26
5.1. 海洋信道的特征分析 26
5.2. 海洋信道的仿真方法 26
5.3. 本章小结 33
第六章 阵元信号仿真 34
6.1. 阵元信号仿真方法分析 34
6.2. 高精度时延滤波器设计 35
6.3. 阵元信号仿真结果 38
6.4. 本章小结 40
第七章 系统实现和波束形成 41
7.1. 系统实现 41
7.2. 用波束形成检验仿真结果 43
7.3. 本章小结 45
结束语 46
致谢 47
参考文献 48
水声阵列信号的仿真
摘 要
水声信号处理的主要任务是在背景干扰情况下,对水声场时空抽样,进行空间和时间变换和分析,实现对水下声信号的检测、定位和分类识别。当前水声信号处理算法研究过程中利用海上和湖上试验获取水声阵列数据的方法具有成本高昂、水声环境复杂以及试验条件单一等缺点。为了克服上述缺点,本文开展了水声信号仿真研究,通过水声信号的特征模拟、海洋环境噪声模拟、海洋信道模拟和水声信号阵列化处理研究,实现了海洋环境中目标辐射噪声和主动声纳脉冲信号的阵列接收信号模拟,并通过波束形成等方法验证了仿真结果的正确性。同时,本文基于MATLAB实现了一套水声阵列信号的仿真软件,可以模拟并输出与设定参数条件一致的水声阵列信号,为水声信号处理算法研究提供了良好的支持。
在第一章,论文总体上阐述了仿真软件系统的各个部分的功能及相互关系。在第二章,论文首先阐述了对噪声信号的统计描述和仿真原理。论文分析了海洋环境噪声的特点,讲述了海洋环境噪声的仿真方法。阐述了水声目标辐射噪声的特征,然后对水声目标辐射噪声的平稳连续谱、线谱和时变调制谱分量分别提出了相应的仿真方法。在第三章,论文阐述了在水声技术中普遍应用的脉冲信号的分类和数学表达,并讲述了对于脉冲信号的仿真方法。分别基于希尔伯特黄变换和短时傅立叶变换探讨了脉冲信号的时频特征分析方法,并对两种方法进行比较。在第四章,论文阐述了水声目标运动的三个状态,分别是圆周运动、直线运动和蛇形追踪运动,对三种运动状态的仿真方法进行了数学上的表述。在第五章,论文重点探讨了海洋信道对水声声波传播的重要影响,包括传播衰减、多途效应和多普勒效应。论文分别探讨了对上述三个方面的仿真。在第六章,论文探讨了阵元信号的特征和仿真方法,重点分析了高精度时延滤波器的仿真方法。最后在第七章,介绍了整个软件系统的实现和对仿真结果的验证,通过波束形成对前述的信道仿真和阵元信号仿真进行验证,证明仿真结果的正确性。
关键词:辐射噪声,运动轨迹,脉冲信号,环境噪声,海洋信道,阵元信号,波束形成
Simulation of Acoustic Signals for Array Processing
Abstract
The main task of underwater acoustic signal processing in the case of background interference is the sampling of acoustic field in time and space, transformation and analysis, the implementation of underwater acoustic signal detection, location and classification recognition. The method currently used in the study of underwater acoustic signal processing algorithms on sea and lake experiment for acoustic array data is costly, acoustic environment and complex test conditions causing faults. In order to overcome the above shortcomings, this paper has carried out underwater acoustic signal simulation, through the characteristics of underwater acoustic signal simulation, marine environmental noise simulation, marine channel simulation and underwater acoustic array signal processing research, the target radiated noise in the marine environment and active sonar array receiving signals simulation of pulse signal, and the beam forming method to validate the correctness of the simulation results. At the same time, this paper implements a set of underwater acoustic array signal based on MATLAB simulation software, to simulate and output in line with setting parameters of the underwater acoustic array signal, for underwater acoustic signal processing algorithm research provides a good support.
In the first chapter, the paper generally described the various parts of the simulation software system. In the second chapter, Paper first expounds the composition of noise signals and the principle and methods of simulation. The paper analyzed the characteristics of the underwater environment, expounded the method of the simulation of underwater environment noises. The thesis expounded the characteristics of radiated noise, including the smooth and continuous spectrum, time-varying spectrum and line-spectrum. These three components respectively have simulation method. In the third chapter, the paper expounded the classification and mathematical expression of the pulse signal with widespread application in the underwater acoustic technology. The paper gave the simulation method of the pulse signal. The time and frequency characteristics of pulse signal was discussed with the methods of Hilbert-huang transform and short-time Fourier transform. In the fourth chapter, the paper expounded the motion states of underwater acoustic targets, including circular motion, linear motion and serpentine movement tracking. These three motion states have different methods of simulation for the mathematical expressions. In the fifth chapter, the thesis probed into the important influence to the underwater acoustic waves of the ocean propagation channel, including transmission attenuation, multiple effect and Doppler Effect. The paper discussed the simulations for the above three aspects. In chapter 6, the paper discussed the characteristics and simulation method of array signals, and analyzed the simulation method of high accuracy time delay filter. Finally, in chapter 7, the paper introduced the whole system and proved the correctness of the simulation results on the channel simulation and array signals simulation through beam forming.
KEY WORDS: radiation noise, motion curve, pulse signal, environment noise, underwater channel, array signal, beam forming.
- 绪论
- 引言
因为水声声波等声信号在水体中的传播比其他类型的信号具有独特的优点,所以在对河流和海洋等水体进行科学研究和经济开发等的活动中,水声工程技术起着无可替代的重要作用。
我国是海洋大国,发展水声技术对于发展我国的海洋经济,维护海上权益和建立强大的海军有着重要的意义,我国水声技术的发展与发达国家有一定的差距,因此发展水声技术是我们今后面临的一项重要任务
在水声工程中,探索新的水声工程技术算法,发展水声工程技术,都需要大量的实验数据作为辅助。然而,当前进行这样的大型海上试验会面临很大的困难,需要动用大量的人力物力资源,成本很高。而且,实测的水声信号的数据往往受很多复杂环境因素的影响,不利于初期的探索分析和研究。与之相反,通过计算机软件模拟出的仿真信号不会受到杂环境因素的干扰,减少了实验的成本,而且方法简单有效,因而可以使用仿真的方法来研究水声工程技术。如果能设计一个能够模拟实际的水声信号的仿真系统,必然可以大大促进水声工程技术的研究,使研究过程得到简化,减少研究成本。针对这样的需求,本文基于MATLAB实现了一套水声阵列信号的仿真软件,可以模拟并输出与设定参数条件一致的水声阵列信号,为水声信号处理算法研究提供了良好的支持。
- 水声信号仿真系统结构
在本课题中,水声阵列信号仿真程序分为对水声信号的仿真和对仿真结果的检验两个部分。整个系统由MATLAB程序编写,在PC机上运行,用户使用时通过GUI界面来应用本程序完成信号的仿真工作。如图1-1所示,是水声信号仿真系统的结构图,虚线方框围成的部分为对水声信号的仿真部分,其中,空心箭头表示软件的用户在人机交互界面中进行参数设置,然后程序将参数送入计算机进行计算,得到相应的水声信号的仿真结果,另一个部分是波束形成检验部分,位于虚线方框外部,用户可以通过波束形成的结果判断仿真结果是否正确。
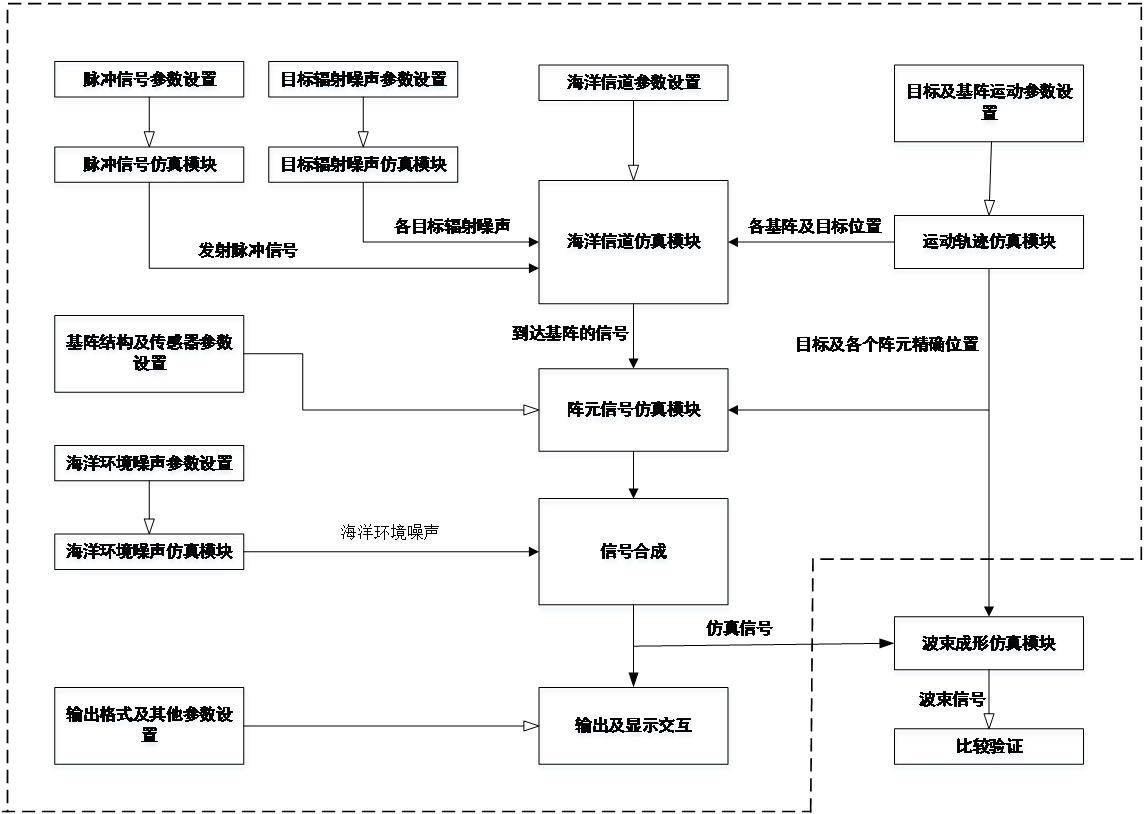 图1-1 水声信号仿真系统结构图
图1-1 水声信号仿真系统结构图
在仿真程序中,按照功能可以将程序分成如下几个部分:
- 目标辐射噪声仿真模块
- 目标运动轨迹仿真模块
- 脉冲信号仿真模块
- 海洋环境噪声仿真模块
- 海洋信道仿真模块
- 阵元信号仿真模块
- 波束形成仿真模块
以上几个模块分别与图1-1中的内容相对应,除了以上模块程序还包括用户对仿真参数的设置等。以后的内容将对这几个部分分别进行研究和仿真,得到各自的仿真结果。
- 噪声信号仿真
- 所仿真的噪声信号的种类及特征
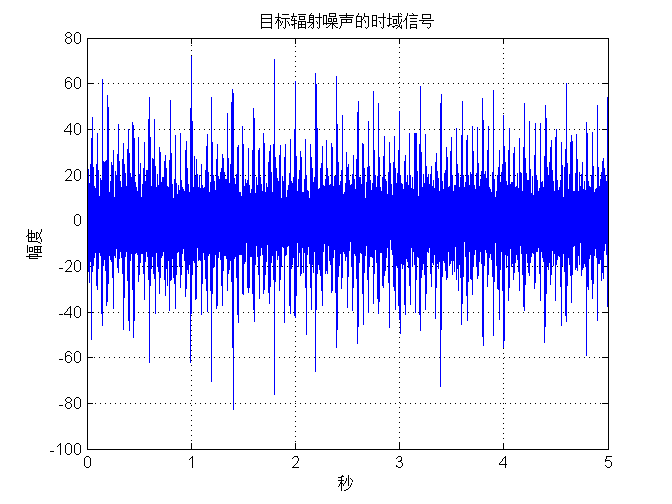
海洋中的各种噪声信号种类繁多,本章主要讨论的噪声信号包括海洋环境噪声和水声目标辐射噪声。海洋环境噪声通常可以近似看成平稳宽带随机过程,具有平稳连续谱的特点,水声目标辐射噪声信号可以分为平稳宽带成分、时变调制成分和窄带线谱成分三个不同的分量。本章将介绍上述两种噪声的特征以及仿真方法
- 海洋环境噪声的特征
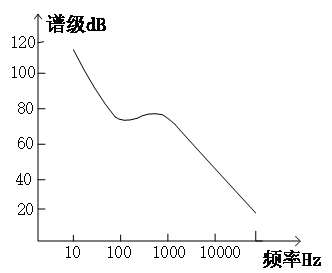
海洋环境噪声实质上是海洋中的背景干扰噪声,它是海洋中各种不同的声源产生的噪声相互叠加形成的,因此它的成因也很多,例如海洋生物、海浪、洋流、海风等等环境因素。据文献[4]记载,我们可以把海洋环境噪声大约分为三个部分,第一部分为低频部分,大约在100HZ以下,按照8~10dB/倍频程的规律衰减,它大部分由于海水的流动、湍流和海浪等水体运动产生。第二部分是中频部分,大约处于100~500HZ之间,它的主要的来源是人为的船只运动,而且其噪声谱级与船只来往的频繁度有很大关系。从总体上说,中频部分的噪声信号的谱级曲线比较平缓。第三个部分是高频部分,位于500~25000HZ之间,通常按照5~6dB/倍频程的规律衰减,它通常来自与海面的波浪,因此它与海面的海况风速等条件有关。根据相关文献[6]记载,得到了下图海洋环境的背景噪声谱曲线,即Wenz曲线。
剩余内容已隐藏,请支付后下载全文,论文总字数:30129字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

