论文总字数:25532字
摘 要
本文对以目标微变动挠度分析为目的的步进频率雷达干涉测量技术进行了研究。为实验步进频率雷达原型机设计了用户软件,并且完成了对雷达原型机的实际测试和数据分析。
本文在广泛研究了微波干涉测量在桥梁动挠度监测中的应用现状的基础上,对步进频率信号、步进频率雷达的一维距离成像和微动测量的原理进行了研究,并利用以上原理完成了对目标建筑的实际微动测量。本文首先完成了基于WinPcap的数据抓取程序,然后用C 编写了数据提取和成像算法程序,接着利用C#和WPF完成了软件的界面设计和后台逻辑的编写,并使用编写的软件配合雷达硬件对建筑距离和微动的实际测量。最后,本文结合实际测量中获得的数据,介绍和比较了频域插零算法、Rife算法和频谱峰值位置估计算法这三种精度优化算法。
本文编写的软件适用于现有的雷达设备,可以较精确地完成距离和微动测量,具有实际意义。
关键词:步进频率信号,一维距离像,C ,精度优化
RESEARCH ON MICROMOTION DETECTION AND DYNAMIC DEFLECTION ANALYSIS
Abstract
This thesis studies interference measurement technology using stepped frequency radar which aims to analyze the micromotion and dynamic deflection of an object. A software is designed for the stepped frequency radar and a few measurements as well as some data analysis have been made.
First, some research work is done, mainly about the present use of interference measurement in dynamic deflection analysis, the stepped frequency signals, range profile and micromotion detection. Secondly, the thesis introduces the design and implementation of a software working with the stepped frequency radar, using mainly C , C# and WPF with the help of WinPcap. Thirdly, The thesis analyzes the real-gained data from a few measurements with both the software and the radar, introduces three accuracy optimization algorithms of range profile, including Frequency Interpolation, Rife Analysis and Spectral Peak Location Estimation.
The software which is designed and implemented in this thesis works well with the radar, and is considerably useful in distance measurements and micromotion detection.
KEY WORDS: stepped frequency signal, range profile, C , accuracy optimization
目录
一 绪论 1
1.1 引言 1
1.2 国内外桥梁微动测量现状 1
1.3 内容和章节安排 2
二 步进频率雷达干涉测量基本原理 3
2.1 引言 3
2.2 步进频率信号形式和物理意义 3
2.3 步进频率信号的一维距离成像原理 4
2.4 步进频率雷达的微动测量原理 7
2.5 实验步进频率雷达参数 9
三 步进频率雷达用户软件的设计 12
3.1 引言 12
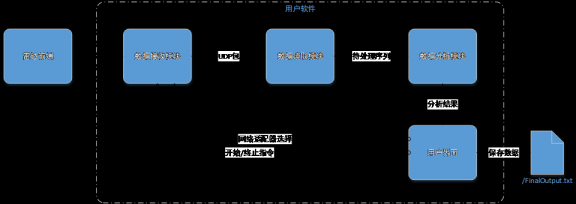
3.2 软件功能模块划分 12
3.3 基于WinPcap的数据接收模块 13
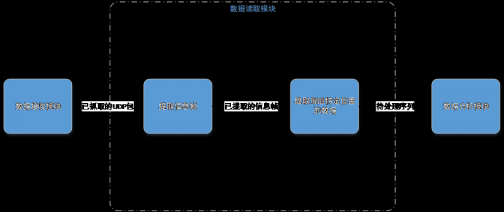
3.4 数据读取模块 15
3.4.1 信息帧的特征 15
3.4.2 信息帧的提取 16
3.4.3 待处理数据的提取 17
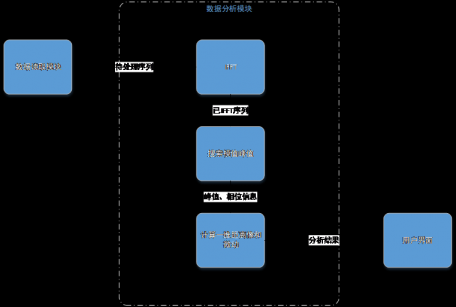
3.5 数据分析模块 17
3.6 用户界面 20
3.6.1 用户界面的设计 20
3.6.2 数据实时处理的实现 25
本章小结 26
四 步进频率雷达的实测和算法优化 27
4.1 步进频率雷达的数据实测 27
4.2 步进频率雷达精度优化算法的运用及分析 28
4.2.1 频域插零算法 29
4.2.2 Rife算法 31
4.2.3 频谱峰值位置估计算法 33
本章小结 37
五 全文总结与展望 38
5.1 小结 38
5.2 进一步工作 38
致谢 39
参考文献 40
一 绪论
1.1 引言
本文开发的步进频率雷达用户软件的主要应用方向是大型桥梁建筑的微动检测。
改革开放以来,我国基础设施建设发展迅速。长江下游第一座过江大桥南京长江大桥到1968年才建成通车,而到2020年,仅南京市就将有13处过江桥隧。随着科学技术的发展,新建桥梁无论在数量上还是技术难度上都有很大提升。例如,规划中将于2019年建成的南京长江第五大桥,全长达到11990米,并具有复杂的双层结构,可以很好地缓解南京长江大桥的压力。如火如荼的基础设施建设,既便利了人们的生活,又有利于经济的发展。
然而,数量众多的桥梁也使我国的桥梁安全面临着重大挑战。由于常年处在风吹日晒的自然环境中,即使竣工时验收合格的桥梁,也可能由于日后的条件变化,发生较为严重的形变,以至于坍塌。由于桥梁数量众多,难以依靠人工对所有桥梁进行即时监测,一些通车已久的老桥和地处偏远的桥梁因此成为安全隐患。近年来,由于桥梁的形变没有得到及时监测而导致的安全事故时有发生。2013年12月30日,南京长江大桥已通车45年,而距离其桥墩不到百米的江堤附近出现了一段20多米长的塌方;2014年5月3日,广东省高州市的一座在建的石拱桥在施工过程中突然坍塌,导致了11人死亡。可见,桥梁坍塌事故的发生会造成巨大的经济损失和人员伤亡。
目标微变动挠度分析技术主要任务是对建筑物尤其是桥梁的微小形变的高精度、全天候监测。本文开发的步进频率雷达用户软件配合实验步进频率雷达,可以在远处实时监测桥梁的微小形变,并通过用户界面对使用者进行提示,便于严重形变的及时发现,对于桥梁安全事故的预防、人民生命财产安全的保障具有重大意义。
本章首先研究了国内外微动测量的现状,然后介绍了本文的主要内容和章节安排。
1.2 国内外桥梁微动测量现状
挠度是桥梁结构中的概念,是桥梁静力刚度的一个指标,反映了桥梁的安全性。动挠度则反映梁体挠度在可变荷载作用下的动态变化。对桥梁动挠度的测量,关键是对桥梁的微小形变的持续测量。
对桥梁挠度的测量方法有多种。传统的挠度测量方法包括水准仪、连通管等,这些技术只适用于对静挠度的测量,无法满足动挠度测量的要求;一些较先进的、可用于动挠度测量测量仪器如光电挠度仪,则限于较短的测量距离,无法用于对一些超大跨度的桥梁的测量。由于以上两类技术均无法完全满足远程、实时测量的需要,GPS和微波干涉测量技术被运用到动挠度测量中来[2]。微波干涉测量技术是通过雷达反射波的相位差异实现对目标物的位移变化进行精确测量的。
意大利IDS公司和佛罗伦萨大学合作研发的一种微波干涉测量系统(IBIS)已于2009年引入国内。它结合了步进频率连续波技术和干涉测量技术,可以实时监测各类建筑物的微小位移[12]。其具有传统测量手段无可比拟的优势:遥测距离可达2km,测量精度高达0.01mm,采样频率可达200Hz,并且可以遥控测量,无需操作人员在现场守候。由于这些优势,这一系统得到了十分广泛的运用。
1.3 内容和章节安排
本文的任务是为现有的实验步进频率雷达开发用户软件,完成从数据接收、数据处理和分析到数据展示的整个流程。此外,本文也将使用这一软件配合已有的前端设备进行实地测量,并结合实测数据研究了步进频率雷达的精度优化算法。
根据以上任务,本文一共分为5章,结构安排如下:
第一章绪论,介绍了本文所做工作的背景和实际意义,总结了国内外工程实际中桥梁微动测量的现状,并介绍了本文的主要内容和章节安排;
第二章介绍了步进频率雷达干涉测量的基本原理,主要包括步进频率信号的一维成像原理和微动测量原理两部分;
第三章分析了所设计的用户软件的模块划分,并详细介绍了各功能模块的实现方法;
第四章使用这一软件配合已有的前端设备进行实地测量,介绍了常见的步进频率雷达精度优化算法,并结合实测数据验证和评价了这些算法;
第五章总结了全文,并介绍了进一步工作的方向。
二 步进频率雷达干涉测量基本原理
2.1 引言
微波干涉测量系统包含两大关键技术,即利用步进频率信号进行一维距离像的提取和利用相位信息进行微动的测量。
距离分辨率是雷达的一种量度,用于描述雷达分辨同一方位角上不同距离的相邻目标的能力[7]。当相邻目标距离使得从发射波被发射到反射波被反射回来的时间间隔等于脉冲的持续时间,即 时,这一距离即为雷达可分辨的最小距离。考虑时间—频率的二元性,有,由此可得距离分辨率的公式

一般来说,雷达用户和设计者都寻求使最小,以提高雷达的距离分辨率,增强雷达性能。
步进频率雷达发射一串共个宽度为、步进量为的窄带脉冲,其总信号带宽为。由上式可知,其距离分辨率,在较小的条件下,可以达到很高的距离分辨率。在接收机方面,由于每组脉冲都采用了相干接收,其瞬时带宽相对较小,这样就避免了通常大带宽信号的实现所面临的硬件上的困难。
本章首先介绍步进频率的信号形式和主要性能参数,然后介绍了一维距离成像及微动测量的原理,最后介绍了实验步进频率雷达的参数。
2.2 步进频率信号形式和物理意义
步进频率信号是一种高分辨率的雷达信号,它的平均发射功率高于一般的冲激脉冲,同时其带宽扩展性又好于线性调频信号。步进频率脉冲波的信号形式为
由式中可以看出,该信号的频率随时间增加而均匀增加。信号的时域图象如图2-1所示:
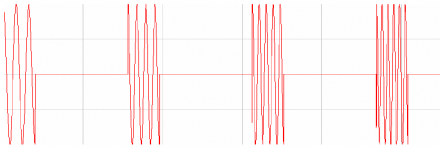
图2-1
步进频率信号时域波形
将步进频率的信号形式进行傅立叶变换,可得步进频率信号的频谱函数
其中函数为

由频谱函数可以看出,由个中心频率为、宽度为的函数叠加而成。
在信号与线性系统理论中,向一个线性系统输入一个冲激函数,得到的输出即为该系统的冲激响应,而的频域形式即为该系统的传递函数。对于步进频率信号,也可以作类似的理解。向目标系统发送一组等频率差的信号,其回波即为该系统的传递函数。对其进行IFFT,即可得到相应的冲激响应。
步进频率雷达分次发射信号,其个发射信号的总带宽为,这降低了系统的瞬时带宽,减少了数字信号处理系统的运算量,同时也导致了较低的数据率,个脉冲才能得到一次完整的结果。
2.3 步进频率信号的一维距离成像原理
步进频率信号是一种高分辨率信号,它能够产生高分辨率的距离像。产生合成的高分辨率距离像的过程在Wehner的著作中有所描述:
⒈ 发射个窄带脉冲序列,其中相邻窄带脉冲的频率以固定的步进频率递增,这样一组个窄带脉冲称为一个脉冲串(burst);
⒉ 接收信号以对应于每个脉冲中心频率的速率进行采样;
⒊ 对收集到的正交分量进行频谱加权,进行目标速度、相位和幅度变化的校正;
⒋ 计算每个脉冲串加权后正交分量的IDFT,以合成该脉冲串的距离像。对多个脉冲串重复处理,可以得到连续的合成高分辨率距离像。
以下对步进频率信号的一维距离成像原理进行分析。
假设在一个脉冲串中,雷达实际发射的信号为
式中为初始相位,而在时间,位于远处距离为的点目标的回波信号为
在雷达接收机中,收到的回波信号同参考信号
混频处理并通过滤波(当为低通滤波,而当时为的带通滤波)后,得到
对该信号进行采样和正交解调,当采用满足每个频点只采一个数据点的采样频率时,得到I、Q正交分量
其复指数形式为
当目标为固定目标时,上式的第一项为常数,而第二项可以视作时间点为、频率线性变化的频域信号。对采样和解调后的信号进行过程如下的离散傅立叶逆变换(IDFT)
从而有
由于以为周期,即对于整数有,所以当
(其中表示取整)时,取到最大值,经转换可得距离的值
由上式可知,相距的不同的点目标,其一维距离像是重合的,此即距离模糊问题。因此,选择步进频率参数时应当考虑雷达监测距离的所在区间,或者对所得数据进行解模糊。由于本文实际数据的实际范围确定,所以不必考虑解模糊的问题。
2.4 步进频率雷达的微动测量原理
上一节介绍了一维距离成像原理,我们据此即可得到目标物体的高分辨率一维距离像。而步进频率位移测量算法,正是在此基础上结合干涉测量技术所提出的。以下将介绍利用步进频率雷达测量目标物体微动的原理。
剩余内容已隐藏,请支付后下载全文,论文总字数:25532字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

