论文总字数:14591字
目 录
1 引言 1
2 作品概述 1
3 方案设计 1
3.1 飞行平台设计 2
3.2 载荷设计 5
3.3 辅助功能设计 7
4 调试试验 9
4.1 防水性测试 9
4.2 抗风性测试 9
4.3 载重测试 9
4.4 应急测试 9
4.5 续航测试 10
5 作品先进性 10
5.1 平台自身较高性能 10
5.2 数据精准测量 11
5.3 应急系统 11
5.4 水上作业 11
6 国内外研究水平 11
6.1 水下无人机 11
6.2 大型水路两栖飞机 13
6.3 小型民用水路两栖无人机 14
7 应用前景 15
参考文献 16
致 谢 17
附件 18
面向海洋应用的特种多旋翼无人机设计
陈冲
, China
Abstract: Because of its high mobility, low cost and high efficiency, multi-rotor drones are gradually used in ocean and meteorological monitoring. However, the shortcomings of the existing drones in marine and meteorological applications are also obvious, such as insufficient endurance, poor wind resistance, and inability to prevent water and corrosion. In order to enable multi-rotor drones not only to integrate various instruments such as ocean, weather, and environment to measure the key elements in the atmospheric boundary layer, but also to enhance the endurance capability without sacrificing the performance of the UAV, such as wind resistance and load. At the same time, it can also respond to emergencies that occur when working in a complex environment such as the ocean, and can achieve the characteristics of its amphibious waterway and the function of an unmanned ship on the water, through the redesign of flight platforms, power systems, energy systems, and control systems. At the same time, the reliability of the test was verified by land test, Lake Test and sea test.Key words: Multi rotor UAV, Marine, Meteorology, Monitor
1 引言
我国作为海洋大国,海域辽阔、岛屿众多、资源丰富。近年来,随着经济的快速发展,用海需求日益增多,自然资源的短缺使得用海矛盾也日益突出,因此急需探索一种能够全天候、高精度、智能化的海洋监测方法来维护海洋生态平衡与资源合理开发利用以及维护国家海洋权益[1]。
近年来,江苏社会经济的快速发展。江苏地区入海污染物排放加重,各类船舶的频繁来往使得海上交通事故时有发生,并且绿潮赤潮、海上溢油等海洋灾害及突发性事件问题日趋严重。另外,在江苏省海洋滩涂和渔业等资源开发方面,存在开发方向单一、规模小、效率低、科技拉动不足等缺陷[2]。
服务沿海开发和支撑海洋管理的能力亟待提高,国内外对此都进行了积极探索。目前常用的海洋监测手段主要存在成本高、机动性差、效率低、精度低等问题[3]。如现场监测野外工作量大,人力成本高,作业范围小且效率低下;远程视频监控依靠固定摄像头拍摄只能获取小范围的影像资料且精度不高[4];卫星遥感影像获取周期长,分辨率不高,易受天气影响,延时严重。载人航空遥感满足高精度高分辨率监测需求,但在飞行安全、航空交通管制、气象条件和费用方面都存在较多限制[5]。鉴于现有监测方式的局限性,在海洋灾害监测技术和海洋观测技术上的创新显得尤为重要。小型民用无人机是一种新型监测手段,是对传统监测方式的有力补充,具备较强的机动性、造价成本低、效率高和环境适应性强等特点,可以快速获取高分辨率的图像和经纬度数据,完成高污染、高强度和高风险海洋监测任务,可有效提升我国海洋综合监控能力[6]。
2 作品概述
海洋特种无人机不仅能够集成各种海洋、气象、环境等仪器来测得大气边界层内关键要素数据,还能够在不牺牲无人机抗风性、载重等性能的情况下提升续航能力;同时,还能够应对在海洋这种复杂环境中工作时出现的紧急情况,并能实现其水路两栖的特性与水上无人船的功能。作品经过三年的打磨,从室内组装、仪器集成、功能开发到校内试飞、湖试、海试,共申请了数十项国家专利,并在多次比赛中获奖。
3 方案设计
方案设计包括飞行平台设计、载荷集成、功能开发等内容。飞行平台设计主要是设计符合气体动力学且能够满足载荷安置的机架以及选择合适的动力系统;载荷集成主要是为要搭载的仪器设备设计主控制板及数据传输装置;辅助功能开发主要是为飞行平台提供能够确保其安全、准确、高效测得数据的辅助装置。
3.1 飞行平台设计
3.1.1 机架
选用碳纤维六旋翼的方案,如图3.1和图3.2所示,六轴给予了小空间大载重的可能,有利于在科研船以及各种小场地的起飞工作。同时采用六发满足了飞行器的机械容错性,可以在失去一个发动机的情况下安全返航,在失去两个发动机的情况下安全地迫降,避免重要科研仪器损坏与数据的丢失。主体结构采用碳纤维材料,这类材料具有高硬度、重量轻、无磁性、抗腐蚀和使用经济等优点[7]。六旋翼密闭机壳防水等级达到IP67,轴距1100mm,电机座下方增加绕流器,可以减小空气阻力,增大水上浮力。机架下方设置光电吊舱,用来搭载推进器、发动机、照相机等设备。中心盘上方用亚克力板代替碳纤维,以保证机内信号不被屏蔽;亚克力板上有透气阀,平衡内外气压。
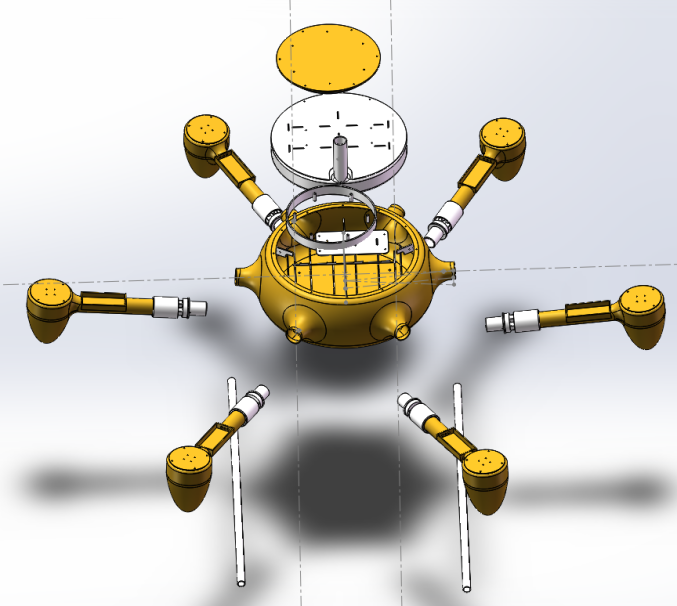
图3.1 六旋翼设计图

图3.2 六旋翼效果图
3.1.2 能源系统
现有锂电池无法满足无人机的续航要求,目前可以用氢燃料和燃油两种技术手段进行替代。氢燃料电池的优点是运行噪音震动小、发热少;而油电混动的优点是燃料易获取。因为要用在海洋与气象这些特定环境,两种技术手段的缺点更值得被关注,这些缺陷决定了如何进行水汽交换以及如何进行防水密闭。在不考虑资金限制的情况下,首选氢燃料电池。武汉众宇科技的HyLite系统(如图3.3所示)能够实现多旋翼4小时的有效续航,系统寿命达5000小时,远超过油电混动装置。南京婆娑航空的油电混动装置(如图3.4所示)最大输出功率3000W,可以满足特种无人机充足的运行余量。在试验过程中,我们选取了油电混动装置作为能源系统。

图3.3 HYlite 氢燃料电池

图3.4 ARIES 油电混动系统
3.1.3 动力系统
燃料电池系统输出2000W-3000W功率,电压为30-50V,普通6S电机电调已经不满足需求,因此选配的是14S电机电调。由于14S级别的电机电调属于效率型,转速慢,载重大,散热小,但抗风性和稳定性差。综合稳定性与载重之间的需求,选择大疆120A电调,并搭配19寸碳纤桨。
3.1.4 飞行控制系统
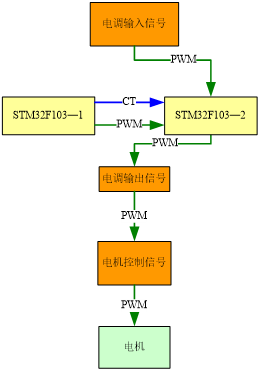
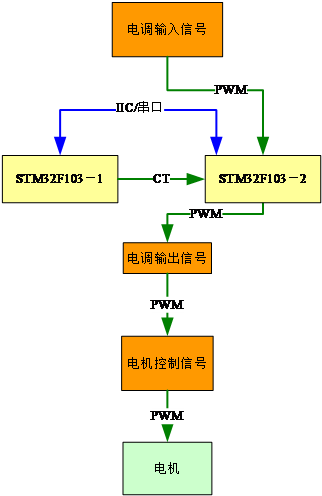
大疆的飞控算法上领先全球,较为突出的是行业级飞控A3。相比于A2飞控,A3配备三套IMU和GNSS模块,三冗余系统使得飞行安全更有保障。且完美兼容LB2和DJI GO。若集成D-RTK GNSS模块可以实现厘米级精度的定位[8]。通过对A3飞控二次开发实现无人机的个性化功能,设计原理图如图3.5所示。该飞行控制系统一方面掌控了飞行器遥控器输入的若干关键信号,依次为油门信号、俯仰信号、横滚信号、模式切换信号;另一方面对电调输出的信号进行控制,为飞行器姿态校正开发预留。
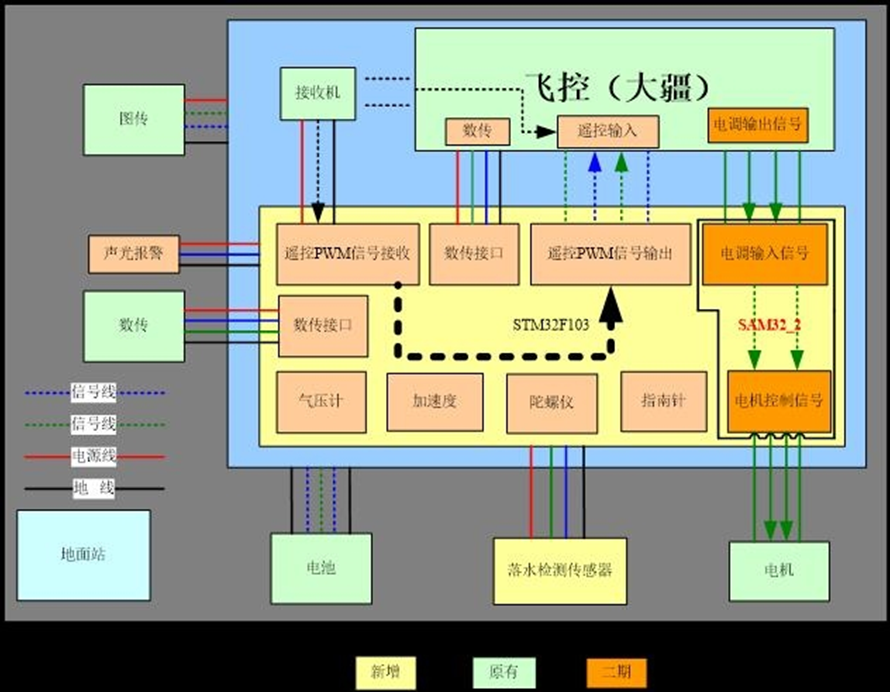
图3.5 飞控二次开发原理图
如图3.5所示,飞行控制单元包括遥控器PWM信号的输入与输出、数传信号的输入与输出、气压计、加速度、陀螺仪、电子罗盘、落水检测传感器接口及发挥部分信号切换单元。其中,遥控器信号的输入与输出单元的目的是为了控制飞行器的行为,在飞行器发生紧急情况下对其进行管控;气压计可测量出飞行器当前所处的高度,为飞行器自动起飞控制提供了反馈的输入信号,而不是简单的开环控制;板载的姿态传感器及电子罗盘可对飞行器的姿态进行实时监测,可判断出飞行器的姿态,为飞行器的坠落等提供重要信息;结合落水检测传感器即可得知飞行器是否坠落到水中:如果坠落到水中,并检测到飞行器的姿态是正的,在水波浪不大的情况下飞行器进行水上起飞,起飞过程中通过气压计测量高度,直到飞行器飞行到指定的飞行高度然后释放控制权给遥控器或者地面站,在整个过程中可通过3DR数传监控飞行器的姿态及高度等相关信息。
3.2 载荷设计
剩余内容已隐藏,请支付后下载全文,论文总字数:14591字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

