论文总字数:14711字
目 录
1绪论 5
1.1智能小车概述 5
1.1.1 智能循迹、避障小车分类及应用 5
1.2 国内外研究现状 6
1.3本设计的研究目的 7
1.4 本设计的主要内容 7
2智能小车总体设计方案 7
2.1 总体设计方案 7
2.1.1 系统设计步骤 8
2.1.2 系统基本组成 8
2.2整体控制方案确定 10
3本系统所采用的主控制器件 11
3.1 STC89C52单片机 11
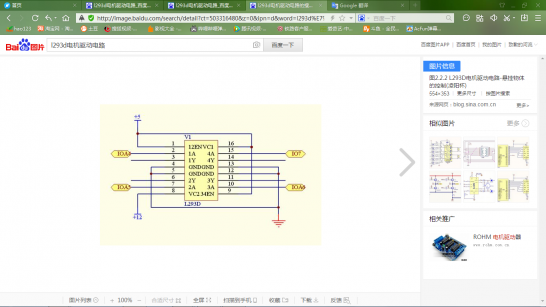
3.2 L293D电机驱动 12
3.3 LM393避障处理芯片。 12
3.4 红外对管循迹模块 13
3.5红外避障模块 14
4系统硬件原理图及小车具体功能介绍 14
4.1 单片机晶振电路 14
4.2 电机驱动电路 15
4.3 小车功能的具体实现 16
4.3.1 循迹 16
4.3.2 避障 16
4.3.3 同时开启循迹避障 16
5系统的软件设计 16
5.1软件设计流程 16
5.2系统的编译器 17
6本设计的总体调试及应用前景 22
6.1硬件的测试 22
6.2系统的软件调试 22
6.3,智能小车前景 22
7 结论 23
参考文献 24
致谢 25
附录 26
基于STC89C52单片机的智能循迹避障小车
曹伟
,China
Abstract: With the development of Internet of Things technology, unmanned vehicles, unmanned factories, service robots and other intelligent facilities will gradually come into our lives, this article is based on STC89C52 of Intelligent tracking, obstacle avoidance car. Use STC89C52 microcontroller, L293D motor driver chip, LM393 avoidance processing chip and an infrared reflector technology for automatic tracking of the car and obstacle avoidance function, the default burning program is a comprehensive program tracking obstacle avoidance, tracking avoidance has three modes, through the switch to switch modes, mode 1: tracking lights to indicate that at this time is to find the black line mode; mode 2: obstacle avoidance lights to indicate that this case is the obstacle avoidance mode; mode III: Indicators tracking and obstacle avoidance At the same time light, indicating that at this time is tracking obstacle avoidance while light.
Keywords: STC89C52、L293D、LM393、Tracking、 obstacle avoidance
1绪论
二十一世纪以来,在计算机技术的发展下,物联网技术开始兴起,其中代表着物联网技术之一的无人驾驶技术正在崛起,所谓的无人驾驶,并不是指完全不需要人工操作,而是指在人工的设计下,在车内安装上计算机系统,很多以前需要我们操作的步骤可以由计算机系统代替我们来完成,人们在驾驶的时候不需要像以前一样时时刻刻控制着汽车的方向,注意路上的状况。这样反而能降低由于人为的疏忽而导致的事故。它就是一种智能汽车,以后一定是广泛存在于生产生活中。本设计就是在这样的背景下产生的。
1.1智能小车概述
智能汽车是最新科技成果,是计算机,互联网等现代汽车工业和产品的结合,通常都具有自动驾驶,自动变速,自动识别道路等功能,这些功能主要通过在车上安装传感器来实现。现代的智能车发展很快,随着人民生活质量的提高,智能车已经逐渐与我们的生活息息相关,小到孩子手里的玩具,大到工业生产,无人驾驶汽车,在各行各业的实际成果。智能汽车的设计和开发涉及多个学科和控制,模式识别,电子信息,电气,计算机,传感器技术,机械等领域,是一种综合的多学科产品类别。
智能小车可以分为三大部分:传感器检测部分;运行部分;CPU。比较常见的有循着固定路线行驶的简称循迹小车,遇到障碍物能主动避让的即避障小车,还有的有智能检测系统,能检测各种指标的检测小车,此外还有光感行走入库等比较实用的功能。在人们对物联网技术的逐渐了解和熟练中,各式各样的智能小车陆续被制作出来,种类、功能,模型,外观等越来越丰富,与我们的生活也会更加贴近。本篇论文讲的就是其中循迹、避障的功能。
智能循迹、避障小车分类及应用
智能循迹小车又可以叫做AGV,意思是自动导引运输车,它发展到现在已经有了50多年的历史了,其中的种类也是多种多样,分类方法也是多种多样,在这里我们根据行驶的导航方式来分类,我们可以将AVG分为以下几种类型:
- 激光式智能车,主流是红外引导和超声引导;
- 电磁感应式智能车,这种智能车采用电磁感应导航;
- 视觉式智能车,通过安装摄像机在行进过程中捕捉图像来导航。
智能避障小车种类繁多,比较常见的有红外线避障,超声波避障,声控避障。
因为智能循迹、避障小车的特殊功能,它经常一起被应用与以下领域:
- 仓储业。下面提到,世界上第一辆智能车就是因此而诞生的;
- 制造业。智能小车能快速、灵活、精确地不受外界干扰地完成材料运输任务;
- 港口码头和机场。主要是帮忙运输重大物品;
- 医药、化工和食品。这些需要在清洁无污染的环境中生产的产品,可以考虑智能循迹小车的应用;
- 危险场所和特殊行业。小车在这种环境下工作,不会跟人一样会受到心理影响。
1.2 国内外研究现状
智能车在国外起步较早,可以说历史挺悠久的,大约开始于上个世纪五十年代,这段历史主要经历了三段历程:
第一阶段:20世纪50年代。1954年美国的BE公司研制出来当时全美国第一辆自主驾驶车即自主引导车。这个智能车系统是个在固定线路上行走的一个拖车平台,但它却实实在在是历史上第一辆智能车,因为它不需要人驾驶,当时设计这个系统的目的是为了实现仓库运输自动化,提高工作效率,但当时这款智能小车也仅仅在仓库内当作运输物品的工具和机器,但随着社会的发展,智能车系统不断地得到改善和进步,应用的领域也自然而然越来越广。
第二阶段:80年代中后期。世界上的主要几个发达国家开始重视智能车方面的研究并开始投入人力物力研究,例如:欧洲的普罗米修斯项目,主要就是探索这一领域;美国搞出来AHS,也就是自动公路系统,目的就是对智能车辆展开系统的理论和实际研究;日本的ITS,高速公路上的巡航系统研究,主要目的就是研制智能汽车的导航方法。进入80年代中期,很多大的公司尤其是世界知名的汽车公司也都开启了智能车的研究与制造。
第三阶段:从90年代开始。智能车进入了空前的赵大规模的发展,理论与实际相结合,最具代表的是美国某所知名大学机器人开发与设计研究所完成的一个系列的自主车,即Navlab自主车。取得了相当不错的成绩。
现在,综合各领域研究成果来看,智能车在世界上的发展正处于次大规模的第三阶段。
我们国家对智能小车的理解以及对这方面的研究相比国外要晚,技术方面也相对落后于发达国家,我国基本在上世纪八十年代才开始接触智能小车,而大部分的研究尚处于研究的单一技术,没有系统的理论,早期更谈不上实际应用了,尽管我国研究起步迟,技术差,理论不完善,没法与发达国家相比,但是我们在改革开放以后,我们也与时俱进,开拓创新,陆续取得了很多不错的成绩,例如早在2003年国防科技大和一汽集团就练手研制出的我国第一辆自动驾驶轿车。
目前,在这样的形式下,国内很多高校都开始重视培养学生有关智能小车方面的能力,很多搞技术研究的单位,研究院所都在认认真真地进行ITS的研究。相信在不久的将来,经过相关部门和大家的共同努力,我国的智能车辆技术水平一定会得到很大提高。
1.3本设计的研究目的
本研究设计的目的是通过建立智能车载系统,设计并实现自动列车控制系统的能力。在实践中,熟悉单片机为核心的控制芯片,检测汽车的设计中,驱动器和其他外围电路,利用智能控制算法的智能跟踪汽车。理论知识相关学科的灵活应用性,实践性具体方法的电路设计,实现理论与实践的统一。加深的过程中理解和控制理论的知识。
1.4 本设计的主要内容
这次毕业设计是制作一款能进行智能识别障碍或路线并做出一定反应的小车。小车具有以下两个功能:红外检测障碍并自动避障、红外寻找黑线并循迹。循迹避障有三个模式,通过切换开关来切换状态,状态一:循迹指示灯亮,避障指示灯不亮,此时是循迹形式,可以寻黑线行驶;状态二:避障指示灯亮,循迹指示灯不亮,说明此时是避障模式遇到前方障碍物小车会自动转弯避开;状态三:循迹和避障指示灯同时亮,说明此时是循迹避障同时进行。小车在沿黑线行驶过程中若遇到障碍则停车。
2智能小车总体设计方案
2.1 总体设计方案
本设计的总体方案很简单,避障采用两组红外线收发完成,循迹通过两组组红外光电二极管完成。小车以两个直流电机为主驱动,采集到信息后送到STC89C52单片机进行数据处理,处理完成后由它传送给四通道驱动集成芯片L293D,让它继续完成接下来相应的动作,即改变两个直流电机的工作状态,宏观上观察就实现了循迹和避障的功能。通过这样实现了智能控制,相当于一个简易机器人了。
2.1.1 系统设计步骤
(1)依据自己的理解以及结合总体设计方案,确定整体的控制方案;
(2)设计合理的硬件原理图;
剩余内容已隐藏,请支付后下载全文,论文总字数:14711字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

