论文总字数:18274字
目 录
1. 绪论 1
1.1 研究背景和意义 1
1.2 国内外研究现状 1
1.2.1 无人机发展现状 1
1.2.2 路径覆盖技术发展现状 2
1.3 课题主要研究内容及创新点 5
1.3.1 论文主要研究内容 5
1.3.2 论文主要创新点 5
2. 栅格法的环境建模和路径算法设计 5
2.1栅格法原理 6
2.2 栅格法环境建模 6
2.3模拟退火算法 7
2.4蚁群算法 9
2.4.1蚁群算法简介 9
2.4.2蚁群算法生物原理 9
3.设计仿真与结果比较分析 10
3.1 MATALB环境介绍 10
3.2无障碍区域路径覆盖仿真结果 10
3.3有障碍区域路径覆盖仿真结果 12
4.实际飞行实验设计与分析 17
4.1Android开发流程 17
4.1.1 高德地图的引用 17
4.1.2 实现路径的任务 21
4.2 区域覆盖实验设计及分析 27
4.2.1 实验设计 27
4.2.2结果分析 28
5.总结与展望 28
5.1本文总结 28
5.2问题与展望 28
参考文献 30
致谢 32
多旋翼无人机路径覆盖技术研究
王岩
,China
Abstract:In recent years, multi-rotor UAVs have been widely used in meteorological exploration, agricultural monitoring, and border monitoring. Path coverage technology is a key technology used in these fields, but it also has problems with coverage efficiency and is lacking system in practical flight. This paper studies a path coverage planning method that combines grid method and simulated annealing algorithm, transforms the regional coverage problem into the TSP business travel problem.Simulated annealing algorithm and ant colony algorithm are used to simulate the coverage path on matlab. The coverage path on the barrier-free and obstacle-free areas is compared respectively, and the simulated annealing algorithm is used to realize the complete coverage path.Developed an APP system based on Android for actual flight planning, and applied simulated annealing algorithm to the system. Through the Dajiang Wizard pro4 drone, the area coverage was achieved. After three actual flight experiments, the optimal path coverage was obtained.
Key words:Multi-rotor Uav,Path Coverage,Grid Method,Simulated Annealing,TSP
- 绪论
- 研究背景和意义
无人机(Unmanned Aerial Vehicle,UAV)是一种不需要载着驾驶员,使用空气动力产生的向上的升力运载工具,可以使用自备的程序控制独立飞行或着利用无线电遥控设备控制飞行的飞行器。当前无人机根据动力源和起飞装置主要分为三大类,分别为固定翼,飞艇和直升螺旋型。无人机最早的作用是侦察监视作用。但随着各种科技水平的提升,特别是微电子技术和导航技术的长足发展,无人机已经发展成一个全新的研究方向和使用方向,在一些不适合人类直接参与的场合和人类视角不易达到的地方,无人机发挥着不可替代的作用。
近年来,多旋翼无人机因其成本较低,体积较小,与其他无人机相比,能够垂直升降、定点悬停优势在全球各国都得到了大力的发展,无论是在民用或者军用方面都得到了广泛的应用。多旋翼无人机具有显著提高生活质量和提高人类在各种环境中表现的能力,包括气象探测、农业监测、救援行动、运输系统、边境监视等,因为他们引入了一种新的方式来完成任务,这些任务既不涉及人类的参与,也不涉及最低的成本。路径覆盖技术对于提高多旋翼无人机对于目标区域执行任务的目标搜索能力和侦查能力以及提高大气环境监测具有重要的意义,所以本文通过SA和ACO算法,设计出一条覆盖的路径,能够实现目标区域的全覆盖,并且开发出一套能够用于实际覆盖飞行实验的系统。
- 国内外研究现状
- 无人机发展现状
- 国内外研究现状
无人机最早出现在20世纪20年代在第一次世界大战中英国研发了一种无需驾驶人员,而是通过无线电操控的微型飞行器,下面分别介绍我国和国外的无人机发展。
(1)国内发展现状
我国无人机的研究起步相对较晚,起始于20世纪50年代中后期,60年代中后期,20世纪70年代初开始投入无人机研制,形成了“长空”1号靶机、D4小型遥控飞机和无侦五侦察机等系列,自改革开放以后,我国航空事业在探索的过程中得到了飞速的发展和进步,成为了我国经济发展中的重要支柱之一。2017 - 2022年中国多轴无人机的行业发展前景和发展战略报告表面,目前研究使用无人机高达数百种,小型无人驾驶飞机机技术日益得到完善。2014年,我国售出了约20,000架无人机,并且数量还会持续的增长。
当前民用无人机的发展方位主要是巡线、航拍、警用、快递和科学研究等。在消费者市场的推动下,预计未来几年中国无人机市场将迎来一个快速增进的时期。未来,民用无人机会向着安全化、智能化和多功能化的方向大力发展。
(2)国外发展现状
美国国家航空航天局(NASA)建立了一个新的无人机应用程序机构,主要从事各种无人机的民用研发,它与美国国家海洋和大气管理局(NOAA)携手合作使用无人机应用于天气预报,全球变暖等科学研究。2007年,美国航空航天局利用“伊哈纳(Ikhana)”无人机来评估了森林大火肆虐后的火灾的严重程度和火灾后带来的灾害损失,这种无人机相比于“全球鹰”无人机,显得小一点,但其翼展长为20米,航行高度能达到12000米,“伊哈纳”无人机是由军用无人机“捕食者”演变而来,广泛用于环境监测和民用用途。美国各行各业越来越多地在使用无人机,NASA改造最初用于战场的大型高空无人飞行器,用于监测和研究热带风暴和飓风,美国无人机也广泛地应用于野生动物监测和土地管等领域。
2006年,欧洲颁布并立即资助实施了“民用无人机发展线路图”,第一个周期是6年。“线路图”预计从2010年开始,民用无人机的市场会发展迅猛,已经超过了1亿欧元,到2015年将达到2.7亿欧元,其中海上监视与通信各占市场的13%,森林防火与灭火约占市场12%,地球观测约占3.7%的市场份额,治安执法占3%。欧盟计划建立一个泛欧洲的民用无人机协调机构,主要的职责有技术监督、领空管束、标准协定、通用接口、成本控制等的实验研究,以解决最关键的航空安全和适航问题。荷兰已经开始在非隔绝的空域进行“探测和避免”系统的研究和测试。
目前,日本已注册的农业无人直升机有2346架,无人机操作人员有14163人,是世界上最大的农用无人机喷药国家。而以色列是世界无人机领域内制造手艺技术最发达的国家之一。
- 路径覆盖技术发展现状
本文所研究的多旋翼无人机路径覆盖问题,属于全覆盖路径规划问题,全覆盖路径规划,学术界也称为CCP问题,是目前研究较多的一类最优解问题,它是为了求解通过特定特定空间或者目标区域的除了障碍物以外的所有目标点的最短路径。与这个问题相似的还有旅行商问题(TSP)。TSP相比CCP,虽然基本相似,但是两个问题的目标不尽相同。CCP是为了求最低成本下的路线,TSP是为了求最短路线下的成本。本文的目标是设计出一种综合情况下成本和路线双最低的算法,是需要无人机能够回到出发点,也是TSP问题和CCP相结合的研究目标。Choset[1]提出了一种全覆盖的路线规划算法,分为两种情况:离线式和在线式。离线式是指系统已经加载完毕所有区域和障碍物的信息,飞机根据已经设计好的路线进行飞行。在线式指区域信息未知或者部分未知,飞机不停的通过飞行采集信息,通过采集到的信息实时改变飞行路线。两者的区别在于地图信息的加载和完善。在探索CCP问题问题的过程中,最经典,也是最常使用的方法是牛耕法:牛耕法基本原理如图1-1所示:
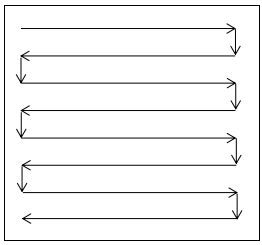
图1-1牛耕式往返作业法图
当前主要的覆盖方法有以下3种:
1、随机覆盖策略
随机覆盖策略是在其移动机器人工作环境下,在不知道沿直线方向的前提下,不能在随机相位重合的情况下直接或在固定的时间内继续向前直走。该策略对传感器的感知和计算能力要求较低,易于避免定位和控制策略。研究人员发现,完成任务的效率与工作环的形状有关,覆盖效率相对较低,重复率被分离,在美国消费者的报告中,使用基于随机覆盖策略的割草机,结果显示大约5%的草坪未被发现,克服这种方法的缺点是将随机覆盖与非随机覆盖策略结合起来[6]。
2、细胞单元分解法
细胞单元分解方法是指对整个平面空间区域进行扫描,如果扫描线与障碍物相遇,就会形成单元格边界,这样也就将整个区域划分成一个个没有障碍区域的子单元,如果两个子单元有共同的边界,它们就相邻。一个邻接图可以用来表示细胞的分解,其中一个节点代表一个细胞,一个边缘代表两个细胞之间的邻接关系。接下来,通过邻接图计算出一个详尽的遍历每个节点的序列,也就是每个子单元遍历的先后顺序,然后对每个子单元进行往复覆盖运动,实现对整个区域覆盖。下面是两种常见的分解方法。
(1)梯形分解法
剩余内容已隐藏,请支付后下载全文,论文总字数:18274字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

