论文总字数:21021字
摘 要
惯性导航系统因为它工作的完全自主性,成为目前各种航行体上广泛应用的一种导航设备。但是惯性导航主要缺点是导航定位误差随时间累积增长,因而难以长时间的独立工作。采用组合导航技术可以有效地解决这一问题。
北斗卫星导航系统自2012年12月27日已经正式提供区域性服务,全面建成后可以在任何时候在全球范围提供高精度的定位、导航和测时服务。然而,有时候北斗接收机会接收不到信号,便会产生无法定位的现象。采用基于扩展卡尔曼滤波器的北斗(BDS)/惯性(INS)组合模式能够取长补短,提高系统的精度、自主性和可靠性。
本文主要研究基于扩展卡尔曼滤波的北斗/惯性组合导航算法。
第一章说明课题的研究背景和意义,简要介绍北斗卫星导航系统、惯性导航系统以及组合导航的发展概况。
第二章介绍北斗卫星导航系统的基本原理及捷联惯性导航基本算法。包括捷联惯性导航系统的坐标定义,捷联惯性导航系统的力学编排。
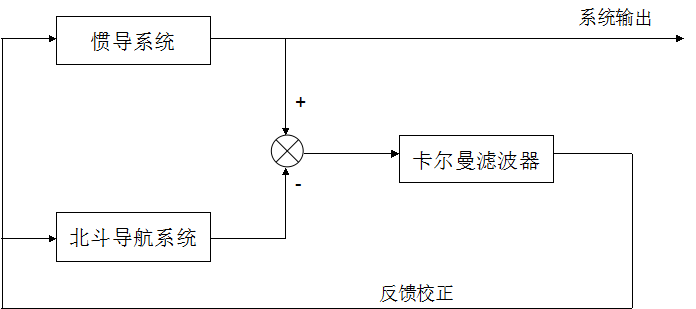
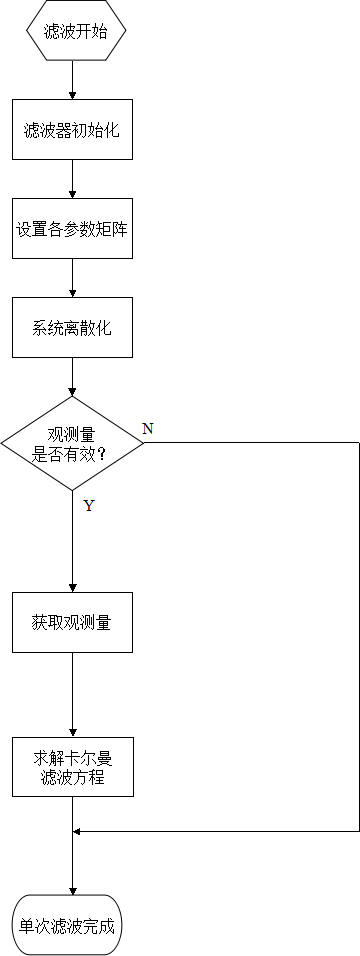
第三章研究北斗/惯性组合导航滤波算法,给出了随机线性连续系统的数学描述和离散系统的卡尔曼滤波基本方程,给出了组合导航系统的状态方程和量测方程,着重研究采用反馈校正的卡尔曼滤波算法。最后采用MATLAB进行组合导航算法的仿真研究,并分析仿真结果。
第四章,总结了本论文的主要研究内容,并对后续的工作给出了几点建议。
关键词:北斗导航系统 惯性导航 组合导航 扩展卡尔曼滤波
Abstract
The inertial navigation system is a kind of navigation equipment widely used in various navigational systems because of its complete independence.However,the main drawback of inertial navigation is that the error of navigation and location increases with time,so it is hard to work independently for a long time.This problem can be solved by integrated navigation.Since 2012 December 27,Beidou satellite navigation system has officially provides regional service,after the completion of a comprehensive can at any time in the world to provide high accuracy of positioning, navigation and timing services.However, sometimes the Beidou receiver will not receive the signal, there will be unable to locate.The BDS/INS integrated navigation based on the extended Kalman filter can complement each other, improve the accuracy, independence and reliability of the system.
This paper mainly studies algorithm of BDS/INS integrated navigation based on extended Kalman filtering.
The first chapter describes the background and significance of the research, and gives a brief introduction to the development of the Beidou satellite navigation system, inertial navigation system and integrated navigation system.
The second chapter introduces the basic principle of Beidou satellite navigation system and basic algorithm of strapdown inertial navigation system.Including the coordinate definition of strapdown inertial navigation system, and the mechanical arrangement of strapdown inertial navigation system.
The third chapter studies BDS/INS integrated navigation filtering algorithm, gives the mathematical description of random linear continuous system and the basic kalman filtering equation of discrete system,gives the state equation and measurement equation of integrated navigation system,focusing on the use of feedback correction of Kalman filter algorithm.
The fourth chapter summarized the main research contents of this paper,and some suggestions for the following work are given.
Keywords: BDS; INS; Integrated Navigation; Extended Kalman Filtering
目 录
摘 要 I
Abstract II
第一章 绪 论 1
1.1 课题研究背景 1
1.2 国内外发展现状 2
1.2.1 北斗卫星导航系统发展概况 2
1.2.2 惯性导航及组合导航系统发展概况 3
1.3 本文主要研究内容 5
第二章 北斗导航与捷联惯性导航基本原理 7
2.1 北斗导航基本原理 7
2.2 捷联惯性导航的基本算法 8
2.2.1 坐标定义及坐标变换 8
2.2.2 捷联惯导系统的力学编排 9
第三章 北斗/惯性组合导航滤波算法研究 14
3.1 卡尔曼滤波基本原理及方程 14
3.1.1 随机线性连续系统的数学描述 14
3.1.2 离散系统卡尔曼滤波基本方程 15
3.1.3 卡尔曼滤波校正方式 16
3.2 北斗/惯性组合导航扩展卡尔曼滤波算法 17
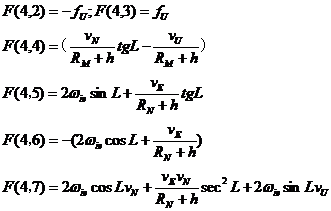
3.2.1 系统状态方程的建立 17
3.2.2 系统观测方程的建立 21
3.2.3 卡尔曼滤波器的反馈校正 24
3.3 北斗/惯性组合导航仿真研究 27
3.3.1 Matlab简介 27
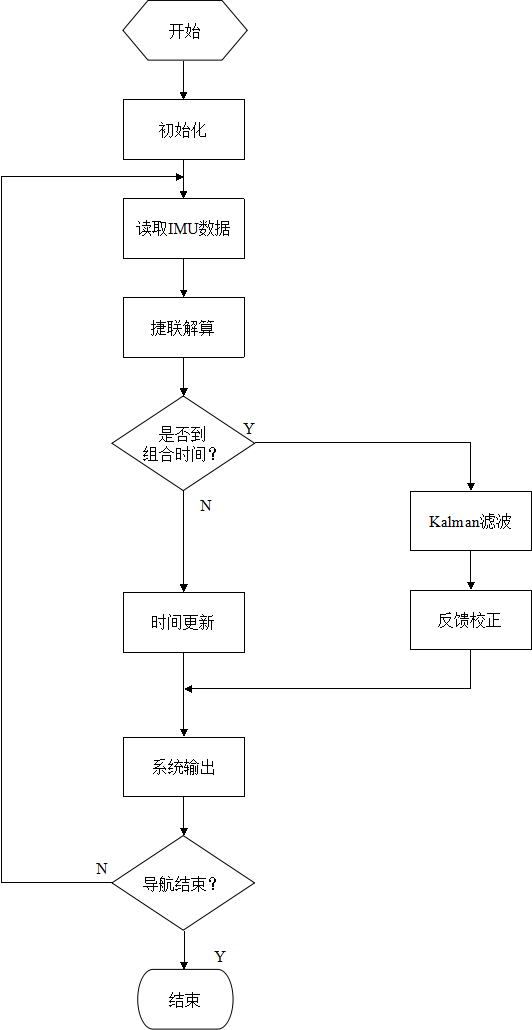
3.3.2 北斗/惯性组合导航程序设计 27
3.3.3 仿真结果与分析 30
第四章 总结与展望 35
4.1 论文总结 35
4.2 研究展望 35
致谢 36
参考文献(References) 37
第一章 绪 论
1.1 课题研究背景
导航定位技术是现当代一门重要的技术学科,在许多民用领域和军事领域都得有着广泛的应用,逐渐成为显示一个国家科学技术水平和军事实力的重要标志之一。随着科学技术的发展,导航系统的种类越来越多,可以利用的导航信息源也越来越多。在许多领域,特别是在军事领域,为应对现代化战争,对导航定位的精度和可靠性都提出了很高的要求。单一的导航系统自身都存在难以避免的缺陷,所以单一导航系统己难以满足要求。把两种或多种导航系统综合起来,利用各个导航技术的特性优劣互补建立组合导航系统,提高导航精度和可靠性,是现阶段导航技术的重要发展方向。
惯性导航系统[1]因为具有良好的独立性,成为目前各种航行体上广泛应用的一种主要导航设备。其所具有的自主性、连续性、隐蔽性等优点,以及带宽大、全天候工作的特点更是各种战术武器和战略武器所急需的特点。惯性导航的显著缺点是随着时间的增长,其定位误差也会随之累积增加,因此惯性导航不能单独长时间工作。惯导系统的这一不足通常可以通过两种途径得到改善,一种方法是提高惯性导航系统自身的器件精度来提高惯导系统的精度,主要通过采用新型材料、新的加工工艺或研制新型高精度的惯性器件来实现;另一种方法就是采用组合导航技术来解决弥补惯导系统单独工作的不足。这些措施都需要投入不少的人力和资金,且惯性器件精度的提高也是有限的。而组合导航技术则主要是通过软件和算法来提高导航精度。大量的实际应用也表明,组合导航系统的方法更为效的,在资金和人力上所需的投入也比单纯地研发高精度惯导系统要少,因此组合导航技术已经成为现阶段导航技术应用和发展的主要方向。
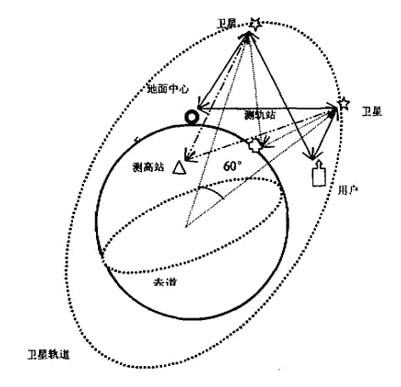
北斗卫星导航系统[2]是由中华人民共和国独立自主设计和发展的与GPS、GLONASS和伽利略系统共存的全球卫星导航系统。本文所指的北斗卫星导航系统(BDS),是被称为“北斗二号”的继北斗卫星导航试验系统(北斗一号)之后我国正在实施的自主发展、独立运行的全球卫星导航系统。整个“北斗二号”系统(BDS)和GPS相同,也是由三大部分构成,即星座空间段、地面控制段和用户接收段。空间段由35颗卫星组成,其中包括27颗中地球轨道卫星(MEOS)、5颗静止轨道卫星(GEOS)、3颗倾斜同步轨道卫星(IGOS)。北斗导航卫星系统自2012年12月27日已经正式提供区域性服务——根据用户的要求可以在任何时候在全球范围提供高精度的定位、导航和测时服务。然而,由于高层建筑、桥梁、隧道和其他一些市区内物体的阻碍,有时候北斗接收机会接收不到信号,便会产生无法定位的现象。为了解决北斗导航系统由卫星信号阻塞引起的“盲区”问题,以及获取运载体的姿态、俯仰角等精确信息,基于扩展卡尔曼滤波器的北斗(BDS)/惯性(INS)组合模式能够使BDS和INS的数据在导航定位的结算过程中同时被利用,从而提高了系统的信息利用率,提升了组合数据的信心和精确度并且提高了系统的容错度和可靠性[3-4]。
综上,为实现较为理想的导航系统,任何单一的导航系统都无法满足要求。能够利用各个导航技术的特性实现优劣互补的组合导航系统,成为现阶段导航技术的重要发展方向。其中由惯性导航系统与北斗卫星导航系统构成的组合导航系统属于应用较为广泛的主流组合导航系统之一。北斗/惯性组合导航系统,克服了各自的缺点,发挥了个子系统的优势,取长补短,最后能够为用户提供具有高精度和高可靠性的速度、位置、姿态等导航信息。组合导航的优点表现为:充分利用各个子系统的导航信息,优劣互补,提高组合系统的定位精度。北斗/惯性组合导航可以实现北斗导航系统完整性的检测,从而提高了可靠性,还可对其中的子系统惊醒校准,对子系统的技术指标要求也较为宽泛。与此同时,易于一体化届时北斗/惯性组合导航的优势,讲BDS接收机和惯导器件封装在一起,可以大大减小系统的体积和重量,降低了成本,也更易于对北斗系统和惯导系统进行同步。因此,北斗/惯性组合导航系统是现阶段易于实现的一种比较理想的导航系统,已成为组合导航技术领域的重要研究方向。
1.2 国内外发展现状
1.2.1 北斗卫星导航系统发展概况
北斗卫星导航系统(BDS,简称北斗系统),是由中华人民共和国自主建设、独立运行,并且与世界其他卫星导航定位系统兼容的全球卫星导航系统。其中,第一阶段的“北斗一代”共发射了4颗卫星(两颗工作卫星、两颗备用卫星),第二阶段的“北斗二代”预计发射35颗北斗定位卫星。整个系统由星座段、地面控制中心为主的地面控制段和用户终端三部分组成。4颗“北斗一号”卫星先后在2000-2007年完成了发射,建立起了我国“北斗一代”卫星导航系统。“北斗一代”所提供的区域性卫星导航定位系统,为我国陆地交通、航海、森林防火等领域提供了良好的服务。
继北斗卫星导航试验系统(北斗一号)之后,2007年4月,我国开始发射“北斗二代”导航卫星,于五年后的2012年12月正式启动了北斗卫星导航系统的试运行。2015年3月30日成功发射了第十七颗北斗导航卫星——首颗新一代北斗导航卫星(G2),代表着北斗卫星导航系统的建设进入崭新的发展阶段。
北斗卫星导航系统的时间起算历元是2006年1月1日0时0分0秒,秒长取国际单位制秒,时间基准采用与世界时协调的北斗时(BDT)。BDT与UTC的偏差保持在100ns以内。

图1-1.北斗系统组网星座效果图
整个系统于2004年启动,并计划在2020年完成整体系统的构建,届时“北斗二号”全球卫星导航系统将向全球的用户提供高质量的定位、导航、授时服务。并且还能在涵盖我国以及周边地区和国家的整个泛亚地区提供广域差分服务其精度可达到一米,同时还能提供每次120个汉字的短报文服务。
1.2.2 惯性导航及组合导航系统发展概况
现代惯性导航技术的发展起始于上世纪50年代,主要特性是是独立性好且能提供载体的姿态参数。惯性导航技术一般可以分为捷联惯导系统和平台式惯导系统。平台式惯性导航系统是指具有真实的机电平台台体的导航系统。该系统中,陀螺和加速度计被安装在一个六面体状的惯性平台上。有专门的平台稳定回路对平台进行控制,从而跟踪导航坐标系相对惯性空间的角速度。捷联惯性导航系统是指所有的惯性传感器均没有经过物理平台进行载体角运动的隔离,而是直接将陀螺和加速度计安装在载体上。经由导航坐标的姿态矩阵,把载体坐标系的加速度信息转换到导航坐标系并进行计算。加速度计和陀螺仪是惯性导航系统中主要采用的惯性测量装置,通常也被称为惯性导航单元。
惯性导航的核心部件就是陀螺仪,传统定义是指安装在万向支架中能够同时绕垂直于自转轴的轴向进动的高速旋转的转子。陀螺仪所具有的定轴性和进动性是它发挥作用的关键。因为不断有采用新技术的新型陀螺仪出现,现在广泛地把可以实现陀螺功能的装置定义为陀螺。因此惯性导航技术的发展概况可以按各种类型陀螺的先后出现以及新型传感器技术的出现来划分为四个阶段。
剩余内容已隐藏,请支付后下载全文,论文总字数:21021字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

