论文总字数:22450字
目 录
摘要 I
Abstract II
1概论 1
1.1课题研究的背景与意义 1
1.2国内外发展的状况 1
1.3总体方案设计 2
2.超声波测距的原理 3
2.1超声波的基本理论 3
2.2超声波测距原理 4
2.3 超声波模块原理 4
3 系统硬件设计与实现 5
3.1超声波测距模块HC-SR04 5
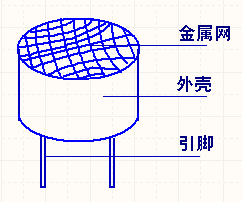
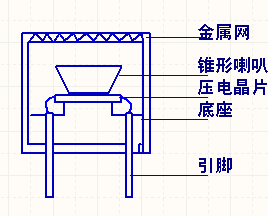
3.2.1探头介绍 5
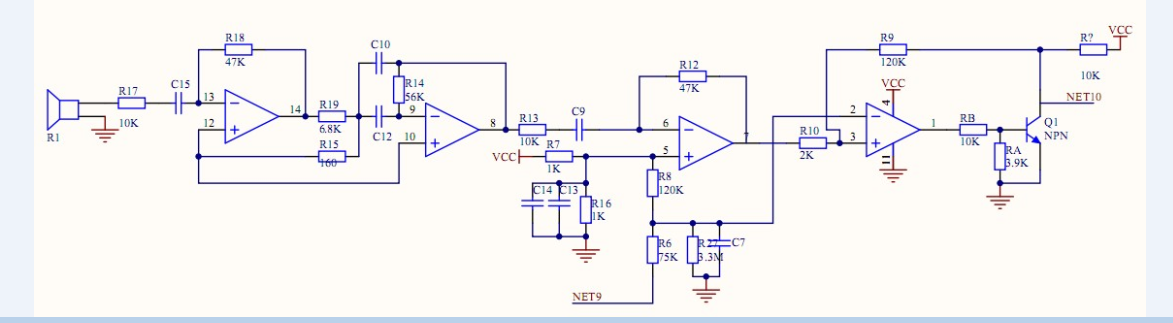
3.2.2超声波发射电路 6
3.2.3超声波接收电路 6
3.2.4 控制电路 7
3.2.5 HC-SR04的电气参数 7
3.2.6 HC-SR04的引脚说明 7
3.2.7HC-SR04整体工作过 8
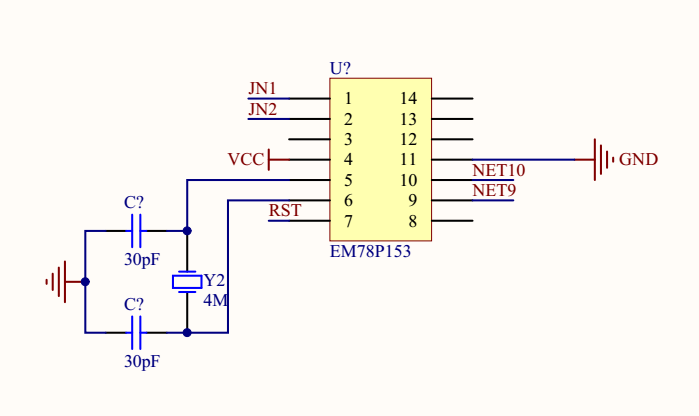
3.2单片机介绍 8
3.3 LCD1602液晶显示 9
3.3.1引脚说明 9
3.3.2字符显示地址说明 10
3.3.3. 读写时序操作 10
3.4 DS18B20温度传感器 11
3.4.1. 芯片简介 11
4. 系统软件设计 12
4.1. 程序设计思路 13
4.2. 程序流程图 13
4.2.1主流程图 13
4.2.2温度采集流程图 13
4.2.3程序 14
5焊接与调试 14
6 总 结 18
7致 谢 19
8 参考文献 20
附录: 21
基于STC89C52的超声液位测量系统设计
董亚
,China
Abstract:Paper introduces to STC89C52 as controller, a ultrasonic module circuit, a control parts, temperature detection and display circuits of ultrasonic level measurement system design, the design method of ambient temperature through gathering, realize the temperature compensation, to improve the precision of the measurement, the use of the relationship between distance and time, the design that can accurately measure the distance between two points of ultrasonic liquid level detection system.
Key word: Ultrasonic;liquid level measurement;sensors
1概论
1.1课题研究的背景与意义
随着工业化的发展与自动控制系统应用,液位测量作为工业过程控制系统中的重要过程控制参数在控制过程中的作用愈来愈受到人们的重视,伴随着国家工业化的发展,液位测量仪作为重要的热工参数仪表在工业测量系统中使用的数量越来越多,测量精度要求越来越高,因此,研究测量精度高、使用方便、价格低廉的液位测量仪对促进工业发展提高系统工作质量具有重要的意义。
由于传统的测距方法存在着很大的缺陷,在一些特定环境下几乎无法使用,例如,电极法测距就是一种比较传统的测距方法,其主要原理是采用的是差位分布电极方式,它的一个很明显的缺点就是电极要长期放置于被测液体中,这样其灵敏度会由于腐蚀和电解而降低。
在全世界电子技术飞速发展的背景下,相继出现了以微波、激光和超声波为工具的测距技术。虽然微波雷达测距技术和激光测距技术有精度更高、反应速度更快和测量范围更广等优点,但是由于他们的难度比较大,成本很高,因为一般仅用于军事工业。而相比较于雷达测距技术和激光测距技术,超声波测距技术难度低且成本低,超声波是一种声波而非实物,所以可以避免与被测物的直接接触,相比较于其他的测距方法,超声波测距的技术因为有着明显的优点与发展潜力,超声波测距仪作为一种新颖的测距工具,因为其用途多样性和应用广泛性而具有很好的前景与发展空间,可以形成一个良好的技术产业,因此,进一步深入研究超声测距技术对促进测控技术的发展与提供工业控制系统品质具有重要的意义。
1.2国内外发展的状况
超声波在传播时既准又远,因为做为一种频率很高的声波,超声波有着很强的指向性质, 并且有着很大的传播距离,另外超声波能够在多种不同形态的介质中传播,因而超声波广泛应用于距离的测量。超声波测距的优点之处有:测试速度快、使用起来方便、易于计算结果和能够做到实时控制。由于超声波测距的测量精确度能够满足工业要求,因此在工业领域和研制移动机器人方面应用广泛[4]。超声波的物理特征决定了它是一种非接触式的检测方式,相比较于其他检测方式,超声波传播过程不会受到各种光线的干扰和被测对象颜色的影响,尤其对于测量处于黑暗无光、有电场磁场存在、空气中微粒浓度大,含有化学药品等不利环境中的事物具有更强的适应能力[5]。
美国Milltronics公司研制的多量程超声液位检测系统具有测量液位及液位差的能力,采用非接触式的超声波传感器,可监视30cm到14cm范围的液位变化。
而我国的液位测量技术、测量方法都远远落后于发达国家测量系统的自动化程度不高,精确度、可靠性、功能等方面与发达国家相比差距很大。
控制技术的发展,进入二十一世纪之后,科技发展的速度越来越快,超声波在测距仪中的应用也随之飞快的发展,并且应用越来越广泛。尽管目前人们所掌握并能够加以有效应用的测距技术有很多种,但是对超声波测距技术的应用还相当有限。因此,要想满足未来社会发展的需要,还需要在精度和定位两个方面继续提升。今随着自动化的不断发展,未来的超声波测距仪必然会朝着这两个方向发展,然后实现多个测距仪的集成和融合,发展出功能更加全面多样的多测距仪[1]。随着智能技术的飞速发展和测距仪技术的多样化,测距仪将会融入智能技术,将在原来判断功能的基础上发展出学习功能,并进一步发展出具有创造功能的测距仪。在未来的社会发展中,尤其是工业领域,各种测距仪将会担当更大的使命。
1.3总体方案设计
传统的超声波测距系统主要是通过模拟电路和数字电路构造构建起来的一个系统。但是由于模拟电路和数字电路存在着自己的缺点,使得所构建的超声波测距系统的可靠性不高,而且调试起来比较复杂。相比较传统的超声波测距电路而言,基于单片机的超声波测距系统在加入温度补偿后,其精度更高,反应速度更快,使用方便,可靠性更强。本课题采用单片机STC89C52作为控制器设计了一台超声波液位测试仪,其设计方案如下:
超声波测距系统硬件组成部分如下图1所示。本系统主要以超声波发送接收模块HC-SR04为检测单元、由液晶显示电路、温度采集电路、蜂鸣器报警电路、按键控制电路、电源和外围辅助电路组成,实现液位测量的功能。
C P U
电源
图1 系统设计框图
2.超声波测距的原理
2.1超声波的基本理论
人类的耳朵可以接收到声波的频率在20赫兹到20000赫兹范围内。我们把频率高于20000赫兹的听不见的声波称为“超声波”。超声波有很多特点:首先超声波带有很强的能量,传播过程中的方向性很强;然后超声波可以在各种不同的介质中传播,而且传播的速度受到介质的影响很大;再者超声波作为一种波,它的传播距离很大;最后超声波像电磁波一样,它的波形、频率等都携带者大量的信息。
超声波的传播速度与很多因素有关,如超声波在气态介质和液态介质两种不同心态的介质中,有着相同的传播速度的表示公式如式2-1:
C =(
=( )
) (2-1)
(2-1)
式中  表示的是介质的密度;
表示的是介质的密度; 表示绝对压缩系数。
表示绝对压缩系数。
超声波在空气中的传播速度如式2-2:
 (2-2)
(2-2)
式子中的T是超声波在介质中传播时,介质的实时温度。
超声波在固态介质中的传播速度分两种情况:
一、纵波在固体介质中的传播速度如下分三种情况:其传播与介质的形状有关
第一、当介质是细的棒子的形状时,传播速度有如下的表述形式如式2-3:
 (2-3)
(2-3)
- 当介质是薄板形状时,传播速度有如下的表述形式如式2-4:
 (2-4)
(2-4)
第三、当在无限介质中传播时,传播速度的表述形式如式2-5:
 (2-5)
(2-5)
上式中的 E表示杨氏模具; 表示的是泊松系数;K代表的是体积弹性模具;G则代表着剪片弹性模。
表示的是泊松系数;K代表的是体积弹性模具;G则代表着剪片弹性模。
二、横波在固体无线介质中的传播速度如式2-6:
 (2-6)
(2-6)
2.2超声波测距原理
标准状态下,我们测得超声波在气体中的传播速度v大概是340米每秒。超声波由发出到反射回来所消耗的时间为t,由于超声波所走的路程是超声波探头到反射物的距离的两倍。所以超声波探头到反射物的距离:
L=(v×t)/2 (2-7)
由于超声波的传播速度与所处环境的实时温度有很大的关联,具体如下:
v=331.4 0.61×T (2-8)
式2-8中T为实时空气温度。
故本测量系统采用温度补偿来校正最终的测量结果,使得测量结果更准确、更精确。通常,如果实时温度相比较于标准状况变化不明显时,我们会可认为声速基本不受温度的影响,视为不变。对于精度要求高的测量,温度补偿的方法可以提高测量精度。由于本系统使用的晶振为12.0M,系统设计理论上的测量精度可以达到毫米级别。
超声波测距的算法设计: 我们定义在标准状况下,超声波在气体中的传播速度为v=340m/s。以此为前提,假设超声波从发射出去到反射回来被接收到为止所消耗的时间是t。假定t=0.03s,那么往返路程就是340m×0.03s=10.2m,而实际的距离是往返路程的一半。
剩余内容已隐藏,请支付后下载全文,论文总字数:22450字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

