论文总字数:20876字
目 录
摘要: I
Abstract: II
1绪论 1
1.1引言 1
1.1.1智能循迹小车背景及发展历程 1
1.1.2国内外研究现状 2
1.2设计智能蓝牙循迹小车目的及意义 3
2系统方案设计 3
2.1智能蓝牙循迹小车基本原理 3
2.2系统总体方案设计 4
2.3具体方案选择 4
2.3.1车身选择 4
2.3.2主控制器选择 4
2.3.3轨迹检测模块选择 5
2.3.4电机驱动模块选择 5
2.3.5电机选择 5
2.3.6蓝牙控制模块 6
2.3.7电源模块选择 6
3系统硬件设计 6
3.1系统总体电路设计 6
3.2单片机控制模块设计 7
3.2.1单片机模块功能介绍 7
3.2.2晶振电路 8
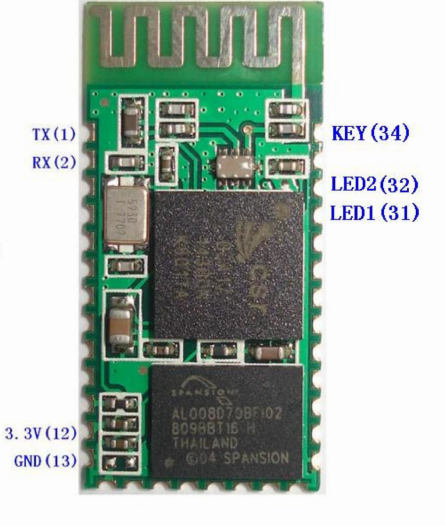
3.3蓝牙接口电路设计 8
3.4轨迹检测模块硬件设计 9
3.5电机驱动电路 10
3.5.1 L298N引脚结构 10
3.5.2 电机驱动原理 11
4系统软件设计 12
4.1程序设计软件介绍 12
4.1.1Keil软件介绍 12
4.1.2串口调试工具 12
4.2.程序流程图 12
4.3程序模块设计 13
4.3.1电机驱动模块 13
4.3.2轨道检测模块程序设计 13
4.3.3蓝牙控制程序设计 14
4.3.4单片机串口程序设计 14
5系统调试 15
5.1系统硬件安装调试 15
5.2小车蓝牙模块连接调试 15
5.3小车运动测试 16
5.4小车循迹模式测试 16
6总结 17
参考文献 18
致谢 19
基于51单片机的智能蓝牙循迹小车
李兆玉
)
Abstract: With the development of intelligent terminal and the requirement of transportation, the research and development of intelligent vehicle has become the focus of researcher attention. Many countries and companies are investing much money on the development of intelligent vehicle. This design is an automatic tracking system of vehicle based on the control of STC89C52 MCU (Microprogrammed Control Unit). The main controller of this system is STC89C52 MCU. Double H-bridges are structured by the L298N driver chip to control the DC (Dircet Current) motors. The infrared reflective photoelectric sensors TRCT5000 detect the black line on the road and return the results to the MCU. Then the MCU will analyze the results and adjust the speed of wheels. Then the vehicle can follow the black line. Besides, Bluetooth is added into the system, so that the vehicle can be controlled by the Bluetooth app in the mobile phone.
Key words: MCU; Photoelectric detector; Bluetooth; Automatic vehicle
1绪论
1.1引言
1.1.1智能循迹小车背景及发展历程
循迹小车指的是可以按照设定的路径移动的小车,现在的智能循迹小车通常装备有各种传感器和导引装置。工业4.0时期,智能移动设备以及其他改装升级的终端已经成为运输、工业等系统的一个重要部分。在极端恶劣生产环境,或者高精度生产环境下,智能小车可以取代人完成相关工作。现在,许多国家和地区都非常关注智能车辆的发展。1972年,美国斯坦福学院的尼尔斯尼森等人利用6年时间设计的自主式机器人Shakey面世,Shakey可以对复杂的环境中自行收集环境信息,并对信息进行分析判断,完成对行动的规划。从那时起,移动机器人数量逐渐增加,多种功能愈加完善。智能车作为其中一个重要分支,受到的关注不断增加[1]。

图1-1 移动机器人Shakey
智能循迹小车,以车轮作为移动载体,可以按照设定的路线行动的机器人,我们称之为智能循迹小车,也可以称之为轮式机器人。它将计算机、传感、信息、导航、通信等技术糅合一体,可以对身处的环境进行探测,根据环境状况对下一步行动进行规划和决策,能够自动行驶,是一个典型的高精尖综合系统。智能循迹小车被运用在多种场景,在危险的工作环境或者高精度的工业车间中,它能替代人工承担各项任务;在危险的军事战场上,可以代替人完成扫雷排雷、军事侦察等任务;在生活中,可以成为盲人前进的导引设备;在科研方面,可以代替人去完成外太空勘测或者矿产勘测等。所以,对智能小车的探索有非常大的意义。

图1-2 扫雷机器人
循迹小车一共经历了三次技术革新。
第一代循迹小车全身不装置任何传感器,无法对身处环境进行探查,不具备离线编程的能力。只能通过简单地开关进行控制,按照编辑好的程序和运动参数进行移动。
第二代循迹小车支持离线编程且控制系统已经是一个完整的闭环,车身装置有一些简单的传感器,可以粗略感知到所处位置已经环境的变化,并可能根据环境变化改变运动轨迹。
第三代循迹小车才可以称为智能循迹小车,相比前两代,最突出的就是出色的信息处理能力和多维度的感知能力,现阶段研究的智能小车都属于第三阶段。其主要特点是车身装配有很多种类的传感器,构成了一个完整的感官系统,能够准确的队外界环境状况进行感知,同时将外界环境信息转换为电信号进行处理。小车拥有一个“大脑”,能够对采集到的信息进行处理判断,并且拥有一定学习能力,能够学习、记录所处的环境信息[2]。谷歌公司的无人驾驶汽车是第三代小车的典型代表,可以跟随“路线带”行驶,可以识别周围环境,能够自动停车。

图1-3 谷歌智能汽车
1.1.2国内外研究现状
从20世纪80年代开始,电子、通讯等方面技术的高速发展以及计算机的崛起,加上工业工艺的进步,很多之前不可能的技术从理论走进了现实生活。因此,国外各国开始了智能机器人研究的浪潮,各大强国以及跨国公司都增加了对智能机器人的研究力度,投入了巨额研发资金。其中,可移动式机器人在生产生活中和军事场景中具有巨大的意义得到了各个国家的重视。
二十世纪末,韩国科技部提出《二十一世界尖端研究计划》,囊括了服务型机器人、微小型机器人及军用用以扫雷的机器人项目。欧盟在其信息社会技术计划中,开展了探测火山情况的机器人、可以用来评价地震灾害危险性的攀爬式机器人,以及利用机器人的交互式行为的博物馆临场感等项目研究。2013年,美国Irobot公司推出一款机器人,可以像人一样跪地,另外,机器人内部集成了GPS全球卫星定位系统,内置地图,能够确定方向,可以标记处障碍物,并有记忆功能。
自2012起,在政策层面上,我国颁布多个利于工业机器人发展的政策,以此增强我国自动化生产能力。从中不难看出,因为国家层面种种战略计划的推出,使国内机器人工业的成长获得很大一步的提高。同时提出要尽快完善工业自动化控制系统,研究工业机器人技术,实现机器人制造、关键材料和配件等装置的研发和市场化,这对于中国国产机器人在将来的进步与普及有着明显的积极作用。2005年11月,中国教育部自动化专业指导分委员会与飞思卡尔半导体公司达成协议,飞思卡尔半导体公司将从各个层面协助教育部开展“飞思卡尔”智能小车比赛。自此,我国大学生智能小车比赛开始发展。另外,在我国教育部举办的大学生电子设计大赛中,智能小车类作品频频出现。

图1-4 飞思卡尔智能车比赛
2013年底,我国工业和信息化部发布《关于推进工业机器人产业发展的指导意见》,指出了我国机器人产业发展目标:利用七到八年时间,在工业上建立比较完善的机器人产业体系,拥有三家以上实力雄厚的技术型企业和十余个相关群体,此很多人因此将视线聚焦在机器人发展中。在世界工业化浪潮的影响下,机器人制造业受到的关注逐渐增加。作为移动机器人的根本,智能小车在智能终端全球化的浪潮中,受到了越来越多的关注,越来越多的尖端科技和微型硬件技术被应用进来。至此,智能小车的角色也得到了本质改变,不仅仅是用于比赛,更多的应用于生产生活,服务大众。
1.2设计智能蓝牙循迹小车目的及意义
目前,国内外很多国家和组织都投入超多人力、财力进行移动式机器人研发,智能小车作为该学科的典范,是目前研究的重点。该智能蓝牙循迹小车由单片机控制模块、蓝牙控制模块、轨迹检测模块、电机驱动模块和电机组成[3],在普通循迹小车的基础上加入蓝牙控制模块,可以通过手机端蓝牙app控制小车前进、后退、左右转向、启动停止等,相比一般循迹小车,增加蓝牙控制模块,可以对小车运动进行遥控。面对复杂的外界环境,如军事排雷排爆,危险环境施工,循迹小车不能准确作出判断,人为控制显得尤为重要[4]。
2系统方案设计
2.1智能蓝牙循迹小车基本原理
循迹小车就是能循着给定轨迹行驶的小车,给定轨迹一般为白色或浅色路面上的黑线或黑色轨迹。小车前端的轨迹检测模块中的红外反射式光电传感器收集路面信息,随后将收集到的结果传输至小车的“大脑”即单片机控制系统,由单片机系统按照设定的算法对路面信息进行分析判断,得出结论后将结果给到小车的“四肢”即电机驱动模块进行执行,实现小车的行走。在以上过程中,蓝牙控制模块连接单片机控制模块,可以控制小车的循迹、前进、后退、转向等,拥有对小车运动的最高控制权[5]。
总结为,在蓝牙遥控下,小车实现循迹、前进、后退和转向等动作,循迹过程中,轨迹检测模块将收集的前方路面概况返回至单片机控制器进行分析判断,随后单片机控制器将决策结果传达至电机驱动模块,这样小车就能够循迹行驶。
2.2系统总体方案设计
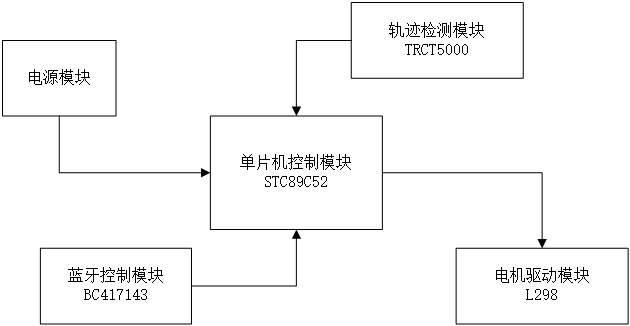
根据电路设计要求,智能蓝牙循迹小车使用STC89C52单片机作为主控制器,使用HC-05蓝牙芯片组成蓝牙控制模块,使用红外反射式光电传感器TRCT5000组成小车轨迹检测模块,使用L298N电机驱动芯片和两个直流电机组成电机驱动模块,智能蓝牙循迹系统框图如图2-1所示。
剩余内容已隐藏,请支付后下载全文,论文总字数:20876字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

