论文总字数:25652字
摘 要
本文通过对基于十自由度MEMS传感器的智能小车导航系统设计进行研究工作,通过对智能车硬件方面的设计以及使用MATLAB/Simulink对捷联惯性导航系统的解算过程进行了模型的仿真设计。
首先,本文描述了基于十自由度MEMS传感器的智能小车导航系统设计项目背景和其他一些相关的背景知识。在本章中,介绍了一些有关于嵌入式系统的知识、国内外智能小车的发展现状和发展方向、STM32的优势简述和MATLAB仿真程序的基本介绍。
其次,本文介绍了关于基于十自由度MEMS传感器的智能小车的原理图的设计和绘制,并分析了其中的一些问题和设计思路。在本章中,介绍了智能小车主控制板的原理图的绘制和设计思路选择。
再次,本文探讨了捷联惯性导航系统的速度更新算法、位置更新算法、姿态更新算法和其他的一些相关算法。在本章中,对捷联惯性导航系统中所需要的算法进行了总结,并选取了一种比较合理的算法设计方案和流程。
接着,使用MATLAB/Simulink对上述的捷联惯性导航系统的算法进行模型的构建和仿真程序的设计。在本章中,设计出了MATLAB/Simulink仿真程序,并使用仿真程序对上一章所介绍的算法进行测验,最后对仿真实验的结果进行分析和总结。
最后,对全文所做的工作进行了总结,并且对所有工作进行了分析,分析了本工作的优势和产生的一些缺点与不足以及需要改进的部分。
关键词:捷联惯导系统;原理图设计;MATLAB/Simulink;仿真设计;半实物仿真;
A STUDY AND DESIGN ON THE SMART CAR NAVIGATION SYSTEM BASED ON THE TEN FREEDOM MEMS SENSOR
Abstract
The paper on the smart car navigation system based on the ten freedom MEMS sensors have some parts, from the hardware design of the intelligent car to using Matlab/Simulink to solve the navigation system design problem.
Firstly, the paper describes the smart car navigation system’s background and other knowledge of the relevant background. In this chapter, I introduce some knowledge about embedded systems, states of the development of the smart car in China and abroad, brief advantages of STM32 and basic introduction of MATLAB simulation program.
Secondly, the paper introduces the schematic’s drawing and analyzes some problems and designing ideas. In this chapter, I introduce the idea of drawing and designing of the schematics selection of smart car’s control panel.
Thirdly, this paper discusses the speed updating algorithm, location updating algorithm, attitude updating algorithms and a number of other related algorithms. In this chapter,I summary the algorithm of SINS in the system and choose a reasonable algorithm design and processing.
Fourthly, using MATLAB/Simulink designs the navigation system algorithm model and simulation. In this chapter, I design the MATLAB/Simulink simulation program and work with the simulation algorithm described in the previous chapter. Then, I analyze and summary the simulation results.
Finally, we summary the full work and analyze all the results and analyze some of the shortcomings and deficiencies of this work as well as the advantages and the resulting need for improved part.
KEY WORDS:SINS; schematic design; MATLAB/Simulink; simulation design;semi-physical simulation
目 录
摘 要 1
Abstract II
第一章 绪 论 1
1.1 引言 1
1.2 嵌入式系统(ARM)概述 1
1.3 国外智能车研究现状 2
1.4 国内智能车研究现状 2
1.5 系统仿真软件MATLAB的简介 3
1.6 STM32核心芯片的关键特性以及它的关键方面的应用 3
第二章 嵌入式系统硬件设计 4
2.1 智能小车的车体结构的选择 4
2.2 智能小车控制系统方案 4
2.3 电源系统设计 4
2.4 在主控制器模块上最小系统电路 5
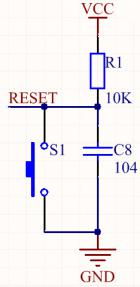
2.4.1 电去耦电路 5
2.4.2 复位电路 5
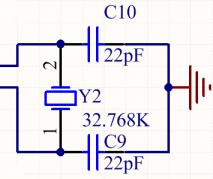
2.4.3 晶振电路 6
第三章 捷联惯性导航算法 7
3.1 背景知识介绍 7
3.1.1 坐标系的定义 7
3.1.2 有关捷联惯导的相关知识的基本原理介绍 7
3.1.3 捷联惯性导航算法 8
3.2 参数的计算 11
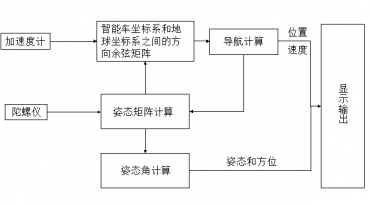
3.3 SINS解算过程 13
第四章 捷联惯性导航组合系统的Matlab/Simulink组合仿真设计 15
4.1 仿真系统概述 16
4.2 智能车轨迹发生器 17
4.3 惯性器件仿真系统 18
4.3.1 陀螺仪惯性器件仿真子系统 18
4.3.2 加速度计惯性器件仿真模块子系统 19
4.4 SINS解算子系统 19
4.5 系统仿真结果与分析 21
第五章 半实物模型仿真实验 26
结 论 28
致 谢 30
参考文献(References) 31
第一章 绪 论
1.1 引言
由于这个不断发展、不断变化的世界,在科学技术领域方面的飞跃式的发展,人类在工业自动化的生产、物流运输、自动化装配等方面的自动化设计与应用已经远远不能够满足当前现代社会快速发展的日益增长的需求,因此对于智能车技术领域方面的研究成为目前研究课题的主要方向。智能车领域方面的技术包括智能控制技术、视觉处理与识别技术、虚拟建模与仿真技术等前沿学科,其各个方面的应用和研究都具有重要的价值和意义。随着经济全球化的飞速发展,计算机在全世界范围内的普及和传感器技术的快速发展,智能车的应用已经慢慢走进到了人们的生活领域,成为人们生活中的一部分。开展智能车的研究对学习机械设计与应用、测控技术与仪器、电子电气与工程及相关领域的发展都具有重要的推动作用[1]。
传感器融合技术是将为高精度的运动检测在各种便携式的电子设备内的应用创造更多新机会,这些都是未来十分看好的应用方式。就在各种多维度的自由度的器件不断问世的时候,十自由度的MEMS电子产品也已经出现在市面上。十自由度MEMS产品的出现与应用使产品具备能够从硬件上同时获得线性加速度、角速率、地球引力、前进方向和海拔高度等完整的各项立体的地理信息数据的能力,并且因此就不会受到GPS卫星导航信号数据的减弱或者不存在的影响。
十自由度微型机械化传感器,即十自由度MEMS传感器的原理是基于卡尔曼滤波器(Kalman Filter)理论,使用的是自适应预测算法和卡尔曼滤波算法,能够自主的识别由陀螺仪、加速度计、罗盘以及其余各种传感器组成的多个传感器组合的输入信息数据,并且可以自我该正传感器的测量误差、错误以及干扰误差信号,从而大幅的提升用户体的验以及大大提高测量精度、分辨率、稳定性和降低响应时间,从而使人们能够更快捷的获取数据信息。
1.2 嵌入式系统(ARM)概述
ARM是微处理器的一种。从ARM诞生的初始架构发展到今天来看,已经经历了多次变革。每一次的架构的改版都在处理器的性能上都有着本质上的飞跃性的提高。通常来看,ARM处理器与传统的单片机微控制器运算处理相比,可以总结出两个方面的优点:(1)软件方面:ARM微型化处理器通常都能够安装有基于不同内核的操作系统,例如:WinPE、Linux,那么在后期的更近一步的开发处理时,就只用烧录新的应用程序,而不用其他复杂的操作;而传统的单片机微控制器却无法引入这些方便的操作系统,它严格必须满足新的系统要求,重新开发新的应用程序;这样,ARM处理器在拥有了方便的外部操作系统之后,也因此会引入了新的系统进程的管理系统,从而让整个系统的运行有了更加高效稳定快捷的提升。(2)硬件方面:一般来说,ARM处理器是一种位数是32位的微型处理器,它的基础运算的速度大约为400-500MHz以上,片内的各种资源也相当丰富,可以满足各种使用需求;而传统的单片机微控制器一般的位数为8位或者16位的数据存储结构方式,它的运算速度大约为50-60MHz左右; 二者的运算速度相差巨大[2]。
1.3 国外智能车研究现状
欧美等西方发达国家对智能车技术的研究是从二十世纪70年代开始的,最初目的只是为了用于军事用途从而节约人力物力资源,保护人民不受各种危险的迫害。然而,随着全世界的科学技术水平的火箭式的跃进发展,人民的普遍生活水平有了大幅度的提高,因此带来了各种日益严峻的问题,在此同时智能车技术在各个领域的应用都得到了大规模的应用。同时,西方发达国家在科学技术领域取得的的卓越成就,以及对于智能车技术研究的大量人力、资金的投入,都促使智能车技术取得了丰硕的研究成果。智能车技术的飞速发展,不仅解决了日益严重的各项社会问题,还带来了巨大的经济效益以及巨大的社会变革。
第一阶段:美国是最早研究智能车的国家,美国在五十年代中期研究开发出世界上第一台AGVS(自动引导车辆系统)的智能车辆,并在南美卡罗来那州的MerCury Motor Freight公司的仓库内投入运营,用于实现物品的自动运输。
第二阶段:80年代以后,AGVS的应用在发达国家得到迅速发展,1984年General Motors公司建立了其第一个基于AGVS的轿车柔性装配线,带动了AGVS在工业领域的大规模应用。同时,西方发达国家也开始深入无人驾驶汽车的研究。
第三阶段:上世纪90年代以后,研究成果比较优秀的是美国卡内基-梅晚大学,该大学从事机器人Navlab系列智能车的研究,取得了非常卓越的成绩。从2005年开始,美国斯坦福大学塞巴斯蒂安特龙教授,研究由谷歌赞助的谷歌无人驾驶汽车,直到2012年8月8日,该无人驾驶汽车已经累计行驶了30万公里,而且在无人驾驶过程中,没有发生一次交通事故[3-4]。
1.4 国内智能车研究现状
虽然在国内,对智能车技术的研究和理论发展以及它的有关方面技术的研究的相比于西方发达国家要晚很多年,但是我国有着众多的研究人士和研究机构,因此智能车技术发展的速度很快。截止到目前为止,有很多著名的大学和研究院的研究团队正在从事该技术领域的理论与技术创新方面的研究,并且已经出产不少优秀的作品出现,并且已经取得了卓越的阶段性成果,为我国今后的智能车技术的发展奠定了坚实的基础。
第一阶段,THMR系列室外移动机器人。1988年由清华大学开始研制,一直研制到THMR-III。之后该项研究由南京理工大学、浙江大学、国防科技大学、清华大学等多所院校联合开展,开发了继THMR-III之后的又一个实验平台THMR-V。
第二阶段,基于现代控制理论,上海交通大学开发了一个专用系统,该系统首先通过采集弯道信息,然后通过算法计算弯道变化程度,可以计算出车辆在转弯时,转盘需要转动的角度。从1992年开始,吉林大学专门从事智能车研究的课题组开始从事智能车自主导航研究,先后研制开发出JUTIV-I到JUTIV-IV四代基于视觉技术导航的智能车。
第三阶段,2003年,国防科技大学的贺汉根教授带领团队研制成功“红旗轿车自主驾驶系统”,这一项目的成功研制,代表着我国从此拥有了自己的自主驾驶轿车,红旗HQ3成功的完成了从长沙到武汉的高速实验。还有2010年世博会上的“海宝机器人”,可以用流利的语言与世博游客进行互动和交流[5-7]。
1.5 系统仿真软件MATLAB的简介
Matlab是一款综合的集成型的数学仿真与设计运算软件,这是一种功能非常强大、功能齐全、涵盖面非常广泛的计算机仿真领域的软件,在Matlab中通常会附带有一款Simulink工具箱。这个工具箱,是一个可通过用户自定义操作的集合数学动态过程系统的分析、构建仿真拟合的程序环境。Matlab这款软件能够为用户提供了一个图形化的建模环境,即Simulink的建模环境,它的丰富的Simulink模块库可以用来帮助使用者讯速有效的构建起动态的仿真系统模型;这种相互交融式的仿真环境不仅能够通过系统自带的下拉菜单来执行所建立起来的仿真程序,还能够通过使用命令行的模式来进行仿真;除此之外,Matlab/Simulink还提供了仿真库的自定义扩充和用户的自我定制功能,并且允许用户做自己定义自己的Simulink模型库,并可以用在具体的自定义的应用环境中。所以,在Matlab/Simulink的综合集成仿真的软件环境下使用者可以自己进行自定义的操作,用来实现捷联惯性导航系统的各种不同的仿真器的结构化设计与建模方式,能够帮助用户极大的缩短这个仿真系统的开发周期时间,从而实现用户所需的仿真系统的快速设计。为了能够完成在Matlab/Simulink集成仿真环境下仿真系统的设计与构建过程的完整的实现,基于捷联惯性导航系统的算法和系统仿真模型,提出了捷联惯性导航仿真平台设计的具体过程,即:第一步:先进行理论,并且理论分析实际导航信息系统,接着建立完善的数学模型;第二步,具体情况具体分析,清晰讨论模型的具体功能的以及具体的实现过程与方法;第三步,对捷联惯性导航仿真系统平台的具体性能进行仿真操作,并且进行结果验证与分析[8]。
1.6 STM32核心芯片的关键特性以及它的关键方面的应用
ARM公司在二十世纪初期生产了以ARM7系列架构为基础的Cortex系列的标准芯片体系结构,用来弥补不断发展的不同技术所对应的各种性能尺度方面上的要求。在ARM系列中,A系列主要是为了满足人们对复杂的应用程序的设计需求,主要用在运行的组合的操作系统;R系列适合实时系统;M系列应用在低成本的微控制领域的方面[9-11]。
STM32F405增强型芯片的主要特点是:
剩余内容已隐藏,请支付后下载全文,论文总字数:25652字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

