论文总字数:26066字
摘 要
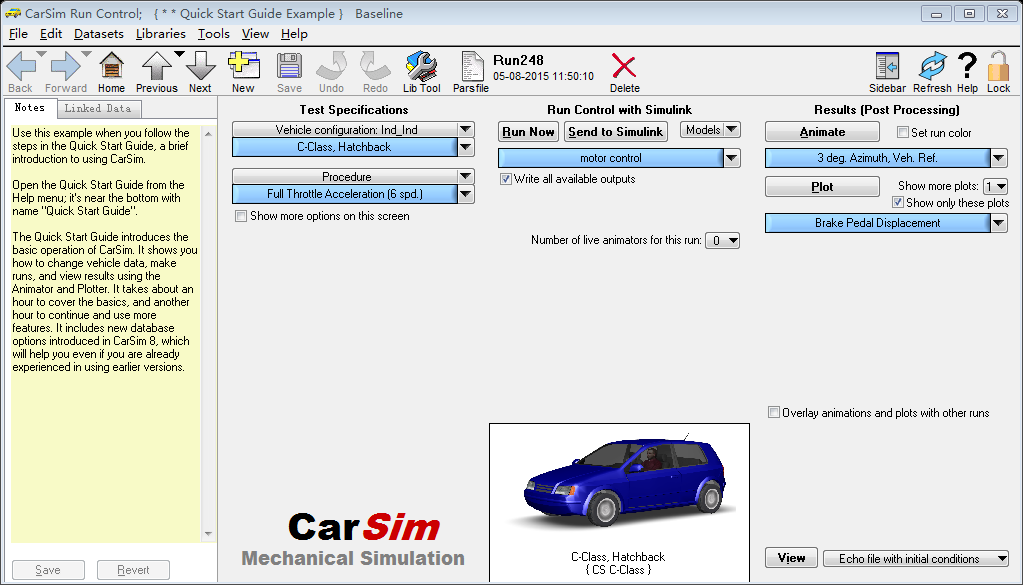
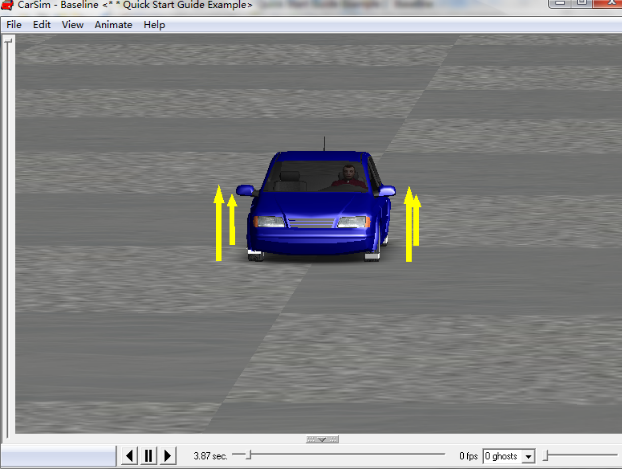
在这其中,轮毂电机故障是电动汽车最典型以及最严重的故障。本文将以此作为背景,首先利用Carsim搭建分布式电动汽车整车模型,并且在Simulink中搭建电机模型,设置Carsim和Simulink联合仿真输入、输出接口,完成整车闭环控制;接着利用状态估计法,基于车轮的力学模型,设计滑模观测器,有效的估计出电机转矩差值,进而估计出轮毂电机所发生的故障;保证观测器对故障灵敏,并且对模型摄动具有强鲁棒性;最后利用Carsim/ Simulink进行联合仿真,验证模型和故障估计的准确性。
关键词:分布式驱动电车;鲁棒性;Simulink;滑模观测器;故障估计
STUDY ON ROBUST FAULT ESTIMATION METHOD FOR IN-WHEEL MOTOR ELECTRIC VEHICLE
02011216 Xiaowei Zhang
Supervised by Guodong Yin
Abstract: With the increase of energy issue, the electric vehicle industry progresses day by day, and has its unique advantages both on economy and safety. In-wheel motor vehicle uses the electric turning and braking system which can significantly shorten the response time of vehicle control, greatly improve the active safety of vehicle dynamic control system. However, the electric system without mechanic backup can lead serious hidden danger when some parts of the vehicle fail or malfunction. In short, electric vehicle is challenged by reliability and safety.
As one of the faults, the wheel hub motor fault is the most typical and serious fault of in-wheel motor vehicle, which can be used as the background of this article. First of all, the in-wheel motor vehicle model will be established based on Carsim and the motor model will be established in Simulink. In order to complete the co-simulation, input and output interface settings of Carsim and Simulink were configured properly to complete close-loop control. Then based on the method of state estimation and the wheel model, a sliding mode observer can be designed to effectively estimate the residual value of motor torque, and the wheel hub motor fault happened. The observer should be sensitive to the fault, and have strong robustness to the model perturbation. Finally, co-simulation based on Carsim/ Simulink can be run to test the accuracy of the model and fault estimation.
Keywords: In-wheel motor vehicle; Robustness; Simulink; Slide mode observer; Fault estimation
目 录
第一章 绪 论 1
1.1 选题的背景和意义 1
1.2 故障估计技术的相关概念 2
1.2.1 故障估计的基本概念 2
1.2.2 故障估计系统的性能指标 3
1.2.3 故障估计方法的分类 3
1.3 故障估计方法的国内外研究现状 4
1.4 本文所研究的内容 5
第二章 分布式驱动电车模型建立 6
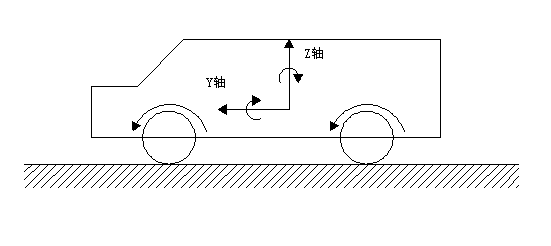
2.1 分布式驱动电车整车模型 7
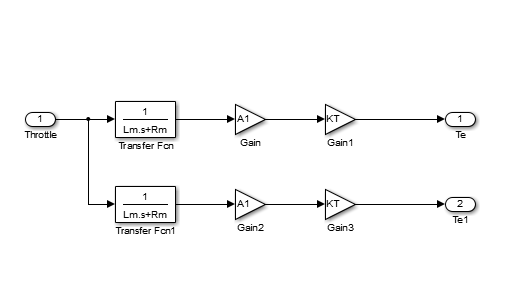
2.2 轮毂电机建模 8
2.2.1 轮毂电机正常工作模型 8
2.2.2 轮毂电机故障模型 9
2.3 轮胎模型 11
2.4 Carsim/ Simulink联合仿真参数设置方法 12
2.5 本章小结 13
第三章 轮毂电机故障估计方法 15
3.1 故障估计观测器基础 15
3.2 滑模观测器的设计 16
3.2.1. 滑模变结构控制的基本原理 16
3.2.2. 滑动模态能观性和可达性条件 17
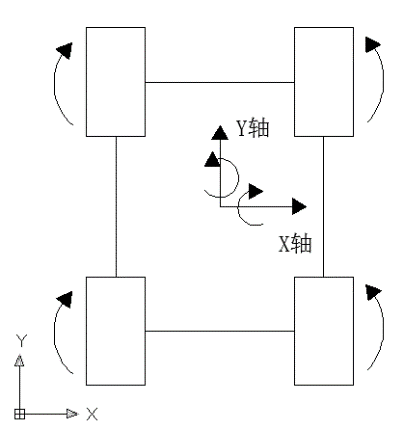
3.2.3. 基于车轮的轮毂电机故障模型 17
3.2.4. 基于滑模观测器的故障估计方法 19
3.3 仿真研究 21
3.3.1. 观测器参数辨识 22
3.3.2. 仿真结果 22
3.4 本章小结 25
第四章 总结与展望 26
致 谢 27
参考文献(References) 28
分布式驱动电动汽车鲁棒故障估计方法的研究
- 绪 论
选题的背景和意义
进入二十一世纪,人类所面临的最大挑战便是能源问题。在工业革命以后,由于大量的资源被开采,使得目前的能源与环境遭到了巨大的破坏。而在这其中,燃油汽车所消耗的化石燃料以及在环境污染中所占的比重的都是相当大的。传统汽车产生的废气和颗粒物会对大气造成严重的破坏。为了节约资源和保护环境,各个国家相继颁布法令,对燃油汽车进行相应的限制策略,不断的制定更加严格的汽车尾气排放标准。

图 1- 1 洛杉矶空气污染
为了解决能源紧缺问题,人们也致力于寻找可以替代化石燃料的清洁能源,包括风能,太阳能等等。特别的,为了减少汽车所带来的能源消耗和环境污染问题,人们开始着手研究新能源汽车,而电动汽车是发展浪潮中的佼佼者。用电代替燃油,可以有效的缓解能源开采压力。并且,电动汽车依靠电能提供动力,排放物不会对环境造成破坏。与此同时,电动汽车所产生的噪声污染也远小于内燃机汽车,对人类的听觉、神经、心血管、消化系统和内分泌系统也无危害作用。
另一方面,对于目前电动汽车的研究已经表明,其能源效率已经超过传统的燃油汽车。而且,在较拥挤的街区中,汽车常处于一种“走走停停”的状态,而对于电动汽车,在驻车时不需要消耗电能;更有甚,在汽车制动时,会产生能量储存现象,电动机可转变为发电机,将电能储存在电池中,实现能量回收,节约资源。
电动汽车的发展可以大幅度的降低人类对于化石燃料资源的依赖,可有效减少石油的开采。向汽车蓄电充电的电力资源可以由各种资源转化而来,比如:风能、水能、太阳能等等。
我国也相继颁布了“八五”计划和“十二五”计划,也表明了政府对于电动汽车发展的重视程度,并且对电动汽车的普及给予了一定的经济补助、免税政策来鼓励电动汽车工业的发展。在良好的政策环境下,电动客车、电动轿车也相继出现在我们的视野中,中国的几大汽车厂商也对于电动汽车的研发取得了重大成果。世界汽车厂商也在电动汽车领域掀起了科技浪潮,比如Tesla公司所推出Model S系列,其蓄电池电量水平已经可以驱动汽车行驶480公里,并且在充电方式上,该车可以选择通过充电站充电,或者通过传统电池所依靠的插座进行充电。此外,特斯拉电动汽车还可以利用太阳能进行充电,配备有如此大电量的电池系统,只需要短短几个小时,便可达到满电量。

图 1- 2 Tesla Model S
然而,在电动汽车迅猛发展的今天,不可忽视的则是它不具有机械后备设施的保障,其电子系统面临着可靠性不足的问题,一旦发生故障,会对人类的生命造成巨大的威胁。所以,如何利用控制方法,对于电动汽车电机、传感器以及执行器所发生的故障进行处理,从而保证在错误发生时,汽车仍能保证在安全范围内行驶,并且能快速检测故障,诊断故障,解决故障。这对于改善分布式电动汽车的主动安全性具有十分重要的现实意义,是电动汽车发展所要迈过的鸿沟。
故障估计技术的相关概念
故障估计的基本概念
1.故障检测[1]:利用一定的技术来确定故障是否发生。故障检测根据被检测对象的性质,可采用不同的诊断方法。对于同一个故障采用不同的诊断方法,结果往往不同,此时需要根据一定的性能指标对不同的方法进行评价。
2.残差:系统的被检测量的预期值和系统的实际输出之间的差值。检测残差是故障检测的主要方法之一,采用一定的残差度量方法(比如残差的范数[2]),并设计相应的阈值,便可已经进行故障检测了。当系统没有故障发生时,理论上系统所产生的残差值应为零,即系统实际输出和预期输出相同,但所有系统中都存在外界的干扰和模型的不确定性,所以实际中即使没有故障产生,残差值亦不为零,此时残差值应小于阈值才不会发生错报的情况;当有故障产生时,残差值不为零,并产生明显变化,当其大于设定的阈值时,认为发生了故障。
3.故障分离:在故障被检测到之后,还需要确定故障的类别和发生的位置,才可以满足实际生产的需要,即在某些自动化程度高的系统中,工作人员不仅要知道是否发生了故障,还需要进一步确定哪里发生了故障,以便维修人员精确的找出发生故障的部件。
4.故障辨识:表示确定故障发生的大小、发生故障的时间以及故障的性质,并加以评价。
5.故障估计:综合了故障诊断、故障分裂和故障辨识的意义;在本文中由于已经确定故障在电机位置,所以此处的故障估计泛指故障检测和故障辨识。
故障估计系统的性能指标
故障估计系统的性能指标大致分为三个方面,即“精、准、快”[1]:
1.对故障的灵敏度:指系统对于最小故障量的估计能力。故障总是由小变大,从轻微到严重,最终到部件完全失效。故障估计系统的灵敏度越高,其能检测出的故障信号越是微弱,表明其对“小”故障的检测能力越精细,对预防严重故障的发生有重要意义。
2.对故障的准确性(鲁棒性):任何系统中都存在着不同类型的模型摄动和噪声干扰,一个可靠的故障估计系统应尽可能的包容系统的扰动,然而对于故障确能准确的检测出来,减少漏报和错报,保证系统的准确性。
3.对故障的快速性:指故障估计系统对于故障发生后在尽可能短的时间内将其检测出来的能力。诚然,故障检测的越迅速,故障持续时间越短,越能及早的对故障进行处理,防止严重故障的发生。、
故障估计方法的分类
早期的故障检测中,由于科学技术的不发达,人们往往依靠自己的知识和常识进行故障诊断,在系统出现故障时,维修人员常常依靠自己的视觉、听觉以及触觉进行故障检测,对故障有一个粗略的估计[3]。随着信息技术和计算机技术的崛起,多种高精密的方法被提出,这些方法利用数学理论,依靠计算机和信号处理技术对故障进行分析处理,结果更加精确有效。故障估计方法大致有一下几类[4]:
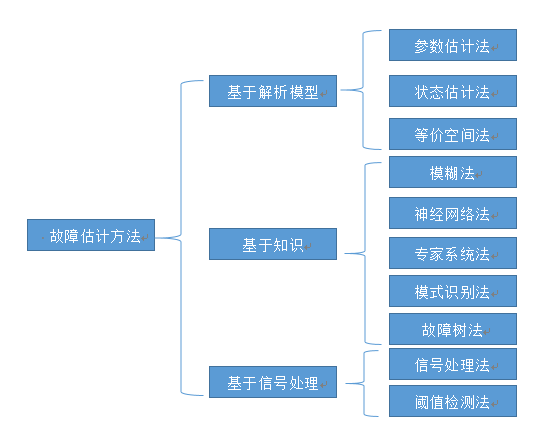
图 1- 3 故障估计方法总结
故障估计方法的国内外研究现状
目前,将故障估计方法应用于的系统大多是线性系统,而精确的分析结果表明所有的系统都是非线性的,线性系统只是一种近似和简化,因此研究不确定非线性系统的鲁棒故障诊断和容错控制具有更广泛的理论意义和实际应用价值[5]。故对于非线性系统的故障估计技术的研究将成为故障估计技术的发展趋势,此技术正处于萌芽阶段,但越来越丰富的控制理论、数学理论、人工智能、信号识别为非线性系统的故障估计技术奠定了扎实的基础,而非线性系统故障估计中需要进一步解决的问题主要在于其鲁棒性问题[6]。
国内外进行故障估计的方法主要集中是基于观测器的方法。文献[7]中,作者在满足一些几何条件下,对一类含有模型不确定性的非线性系统,设计了观测器进行了故障诊断的研究,其中应用到了微分同胚转换的方法。文献[5]中介绍了基于一种广义观测器(Generalized-Observer Canonical Forms-GOCF)来分别对执行器或原件和传感器所发生的故障进行参数估计的方法,并设计了估计算法,通过观测器产生残差,并且与阈值比较,当其大于阈值时,则开始检测故障的发生和进行参数估计,最后再利用决策算法对故障进行分离处理,用于之后的容错控制。文献[5]的方法是对文献[7]的一种改进,前者是依赖于实时的故障参数来进行故障的估计,由于系统模型中仍然存在着模型的不确定性和噪声干扰,即使在没有故障的条件下,输出值依然不为零,因此对于后续所做的容错控制极为不利;然而后者在其基础上设计了参考阈值,很好的将模型摄动引起的偏差和故障引起的偏差分离开来,使系统具有了一定的鲁棒性。文献[6]中提出了一种将Polycarpou和滑模观测器相结合的方法,引用新的自适应率律,使得阈值得到自适应变化,减少误报和漏报律,进一步提升了系统的鲁棒性,而且是针对非线性系统提出的一种快速的故障估计方法。文献[2]中将故障估计方法应用于电动汽车车窗系统,基于解析模型的方法,设置残差的 为车窗电机故障性能指标,并用LMI线性矩阵不等式来求解,此故障估计方法可以迅速准确的将故障提取出来,并且具有一定的鲁棒性。
为车窗电机故障性能指标,并用LMI线性矩阵不等式来求解,此故障估计方法可以迅速准确的将故障提取出来,并且具有一定的鲁棒性。
在基于观测器的方法中,滑模观测器具有稳定性强以及收敛速度快等特点,并且可以实现对系统的参数摄动和外干扰具有很好的鲁棒性,这种性质称为滑动模态的不变性,因此应用比较广泛[8]。文献[9]中,应用滑模观测器对于轮胎的摩擦力和车辆侧偏角进行了有效估计,为车辆系统提供了准确的车辆状态,并且被应用于文献[4]中,用于非线性观测器的输入量,从包含故障信息的车辆状态信息中分离出故障特征,是一种简单有效的方法。文献[10]针对汽车ABS系统,首先分析了各类故障的信号特征,对故障进行特征分类,从而将轮速传感器不同的故障进行了归纳总结,提出了几种故障的数学模型,对于本文故障模型的建立具有借鉴意义。文献[11]针对一类非线性系统,不仅分析了基于观测器的 故障估计问题,还提出了应用李雅普诺夫函数进行观测器稳定性检验的条件,对于观测器求解具有重大意义。文献[12]中提出了一种基于滑模观测器的永磁同步电机无速度传感器的矢量控制技术,通过观测器准确的获得反电势信号,从而获得其中包含的转子信息和转速信息,进而可以通过这些信息来进行故障估计。
故障估计问题,还提出了应用李雅普诺夫函数进行观测器稳定性检验的条件,对于观测器求解具有重大意义。文献[12]中提出了一种基于滑模观测器的永磁同步电机无速度传感器的矢量控制技术,通过观测器准确的获得反电势信号,从而获得其中包含的转子信息和转速信息,进而可以通过这些信息来进行故障估计。
剩余内容已隐藏,请支付后下载全文,论文总字数:26066字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

