论文总字数:36299字
摘 要
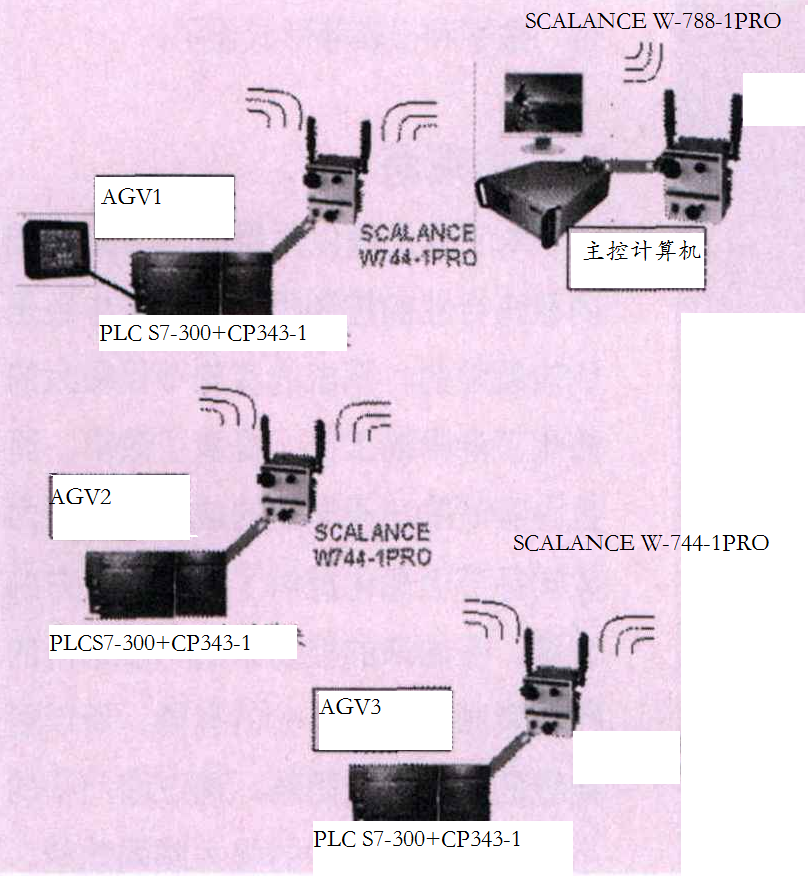
本文首先对生产车间AGV物料搬运调度和路径规划需求进行了分析,设计出软件框架。根据主控计算机和AGV之间的通讯需求,提出了工业级的无线通讯解决方案。
随后,开发AGV调度和路径规划软件实现了三个方面的功能:AGV运行信息动态显示、AGV调度、AGV无冲突路径规划。开发了AGV运行信息动态显示模块,实现了相关数据的处理及AGV运行信息的动态显示。开发了AGV调度模块,实现了AGV任务的自动分派。开发了AGV无冲突路径规划模块,实现了基于Dijkstra算法的最短路径求解和AGV的无冲突运行。
设计了若干算例进行模拟实验,算例仿真结果验证了软件的有效性。
关键词:AGV;调度;路径规划;无冲突运行;无线通讯
Development of Scheduling and Route Planning Software for AGV in Workshop
02011329 Xiaochun Zhang
Supervised by Jianping Dou
Abstract: In recent years, the Automated Guided Vehicle has been widely used in the industry. Due to the limited handling capacity of single AGV, more than one AGVs are often needed for material handling in practice. Since the AGV is generally unable to perceive global information, multiple AGVs need to communicate with the host computer’s scheduling system and run according to schedule instructions to avoiding collision each other as well as improve the efficiency of material handling. The aim of the thesis is to develop a scheduling and route planning software for AGVs in order to satisfy the requirement of scheduling and route planning of flexible AGV material handling. The scheduling system communicates with AGVs via wireless communication link and controls the AGVs running collision-free.
Firstly, the need of AGV material handling’s scheduling and route planning in workshop is analyzed, then software framework is designed. According to communication requirement between the host computer and the AGVs, industrial-grade wireless communications solution is proposed.
Then, the scheduling and route planning software for AGVs is developed to achieve three functions: display of AGVs’ dynamic running information, AGVs’ scheduling, AGVs’ collision-free path planning.The display module for AGVs’ dynamic operation information is developed to achieve the data processing and display of AGVs’ dynamic running information. AGVs’ scheduling module is developed to achieve the assignment of AGVs’ tasks. AGVs’ conflict-free route plan module is developed to achieve solution of best path based on Dijkstra algorithm and AGVs’ conflict-free operation.
A number of examples of simulation experiment are used to test the effectiveness of the software. The simulation results illustrate the effectiveness of the developed software.
Key words: AGV;Scheduling;Route planning;Conflict-free operation;wireless communication link
目录
第一章 绪论 1
1.1 选题背景和意义 1
1.2 本课题研究现状 1
1.2.1 AGV导航技术 1
1.2.2 AGV路径规划 2
1.2.3 AGV调度方法 2
1.2.4 发展趋势 3
1.3 本论文主要内容 3
第二章 调度与路径规划系统框架设计 4
2.1 系统通讯方式 4
2.1.1 功能要求 4
2.1.2 方案选择 4
2.1.3 通讯模块设计 4
2.2 软件总体框架 5
2.3 软件界面设计 8
2.3.1 主界面 8
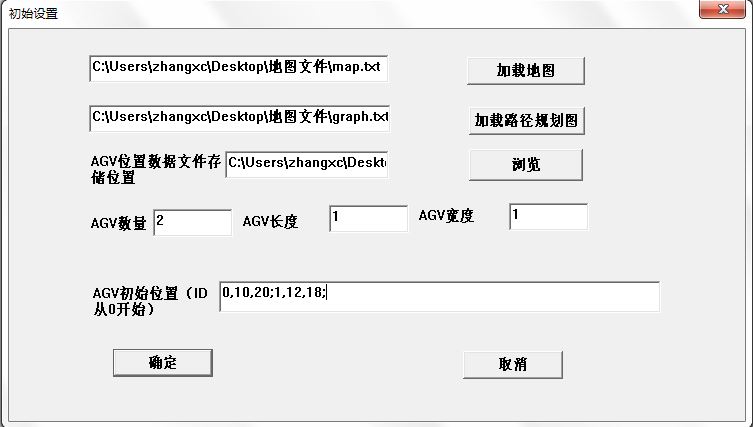
2.3.2 初始设置对话框 9
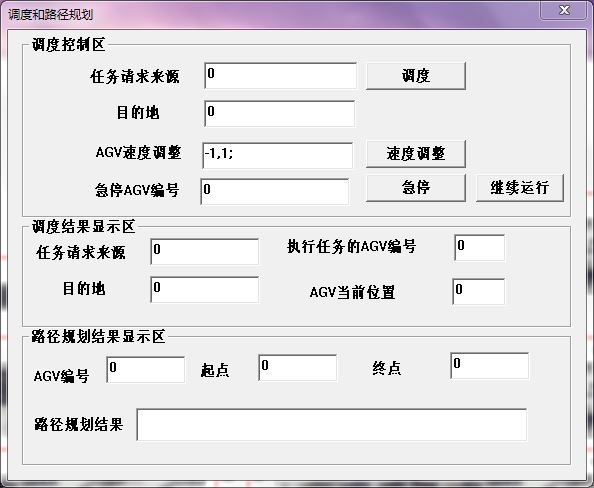
2.3.3 调度和路径规划对话框 12
2.4 AGV类 13
2.5 本章小结 14
第三章 AGV调度模块设计 15
3.1 调度规则 15
3.1.1 工作中心启动规则 15
3.1.2 小车启动规则 15
3.2 调度程序设计 15
3.2.1 流程图 15
3.2.2 调度算法实现 15
3.3 本章小结 17
第四章 无冲突路径规划算法的设计与实现 18
4.1 最优路径求解 18
4.1.1 地图数据的表示方法——图 18
4.1.2 Dijkstra算法简介及其编程实现 19
4.2 AGV无冲突运行策略 20
4.2.1 无冲突运行策略及流程图 20
4.2.2 无冲突运行策略的编程实现 20
4.3 AGV运行过程实时显示模块设计 22
4.4 本章小结 23
第五章 软件有效性验证 24
5.1 软件使用说明 24
5.2 有效性验证 27
5.2.1 仿真测试算例说明 27
5.2.2 仿真验证结果及分析 30
5.3 本章小结 36
第六章 总结与展望 39
6.1 工作总结 39
6.2 后续工作 39
致谢 40
参考文献 41
附录 42
生产车间AGV调度与路径规划软件设计
第一章 绪论
1.1 选题背景和意义
AGV(自动导引车)是Automated Guided Vehicle的缩写,是指装有视觉、电磁、激光、惯性或超声波等导航装置,能根据收到的路径指令自动运行,可以进行物料搬运等工作的车辆。近年来,随着计算机控制技术的不断进步,AGV也得到了越来越多的运用,比如烟草行业、机械装配、医院等场所都可以看到AGV的踪迹。AGV由于运动灵活,被广泛用于生产车间物料的搬运。由于单机搬运能力优先,实践中经常需要由多台AGV同时进行搬运。由于AGV一般无法感知全局信息,为避免多AGV发生碰撞并提高AGV搬运效率,多台AGV需要与上位机调度系统进行通信并依据调度指令运行。本课题以工程机械焊接件生产车间物料搬运为背景,针对运动灵活的AGV物料搬运调度和路径规划需求开发一套AGV动态调度和路径规划软件,调度系统通过无线通讯和AGV联系并控制AGV无冲突运行。
1.2 本课题研究现状
AGV像计算机一样由硬件和软件这两个相互作用的子系统组成,自动导引车系统(AGVS)发展至今,硬件的发展已经远远超过了软件[1],因此,多AGV系统中AGV控制软件的设计已经成为自动导引车系统(AGVS)大规模应用的关键因素。以下对AGV当前的研究现状作简要介绍。
1.2.1 AGV导航技术
AGV导航技术是AGV系统的关键技术,AGV导航方式不仅决定着AGV系统的柔性,也影响着系统运行的可靠性和组态费用。常见的导航方式主要有电磁感应导航、惯性导航、激光导航、视觉导航、超声波导航等[2]。
(1)电磁感应导航主要优点是引线隐蔽,不易污染和破损,导引原理简单可靠,便于控制和通讯,对声光无干扰,制造成本较低,其缺点是需要在运行线路的地表下埋设电缆,施工时间长,费用高,不易变更路线,对复杂路径的局限性大。
(2)惯性导航的主要优点是技术先进,定位准确性高、灵活性强,便于组合和兼容,适用领域广,缺点是制造成本较高,导航的精度和可靠性与陀螺仪的制造精度和使用寿命密切相关。
(3)激光导航,近年来发展较快,在国内外都有广泛的应用。激光导航具有定位精度高,自主性强,适应性、灵活性强,路径的扩充和修改方便等优点,缺点是成本高,且在有些使用环境中易受干扰。
(4)视觉导航,是一种新型的导航方式。视觉导航方式具有信号探测范围宽,获取信息完整等优点,并且基于视觉导航的AGV由于不要求人为设置任何物理路径,因此在理论上具有最佳的引导柔性,但当物体不在视野之内或光线很暗时,视觉导航方式将失效[3]。
(5)超声波导航,超声波传感器能在黑暗中工作,而且由于超声传感器构成系统具有结构简单、体积小、性价比高等众多的优点,在机器人,特别是自主移动机器人领域,已被广泛地应用于障碍检测、定位以及简单形体辨识等方面,并取得了良好的成用效果。超声测距是基于超声波在介质中的传播特性实现的非接触式距离测量[4]。
1.2.2 AGV路径规划
AGV路径规划是指在起点和终点之间按照特定的规则搜索一条最优路径。世界各国的专家学者们提出了许多不同的路径规划方法。[1]由于AGV的运行路径一般较窄,不允许两台AGV并排运行,所以避免碰撞、拥挤的无冲突路径规划算法得到了很多研究者的重视
(1)静态方法
静态方法就是在AGV开始运行之前规划好一条路径,在AGV未完成运动之前整条路径保持被占用。这种方法简单但效率低,在大规模AGV系统中极易引发拥挤,只能用于小规模AGV系统中。
(2)基于时间窗的方法
一段路径段可以在不同的时间窗用于不同的小车。这种方法相比静态方法提高了路径的利用率,算法的复杂度也相应提高,但效率依然有待提高。
(3)动态方法
动态方法是车辆运行过程中不断进行路径规划,有很多具体的算法,如“增量路径规划”等。动态方法可以实现较高的效率,但算法过于复杂,计算量大。
(4)全局规划,动态调整
这种方法是在AGV运行之前先规划好一条最优路径,在运行中根据情况调整最优路径。
1.2.3 AGV调度方法
AGV的调度方法是指关于AGV任务的分派的一系列规则。AGV调度规则主要有工作中心启动AGV服务规则和小车启动AGV服务规则两种[2][10]。工作中心启动AGV服务规则是指只有一个工作中心申请服务而有多台AGV空闲情况下的调度规则,小车启动AGV服务规则是指有多个工作中心申请服务而只有一台AGV空闲的情况下的调度规则。
对于AGV的调度方法,国内外学者研究如下:
剡昌锋[6]等采用改进的遗传算法对在线调度进行研究,研究了遗传算法中染色体的表达,使用换位法表达染色体,改进了评价函数、交叉算法,得到可行的在线调度算法。
焦福明[7] 从单AGV和多AGV两种情况出发,采用粒子群算法,提出了任务预调度的方法。
李志宏[8]通过构建邮政系统的Agent模型,利用各Agent环节的相互竞争和协调作用,实现调度的最优化。
1.2.4 发展趋势
目前AGV在我国的应用主要集中在烟草等行业,随着我国劳动力成本的不断提高,AGV必将在越来越多的行业中得到应用,因此AGV调度与路径规划的研究变得越来越重要。目前在AGV调度与路径规划的相关研究中,多种方法各有优缺点,运用集成方法将不同的算法结合在一起,可以避免单一方法的局限性。另外,能够实现AGV自主路径规划的智能方法将成为大规模AGV系统路径规划的主流方法,将路径规划的任务交给AGV自己去完成,可以使AGV系统的规模不受中心计算机运算能力的限制,而且扩展和维修更为方便。而对于小规模的AGV系统,出于成本的考虑,采用集中控制的方法由主控计算机进行路径规划则更为合适。
1.3 本论文主要内容
本课题是针对运动灵活的AGV搬运调度和路径规划需求开发一套AGV动态调度和路径规划软件,调度系统通过工业级无线通讯和AGV联系并控制AGV无冲突运行。
具体研究内容如下:
剩余内容已隐藏,请支付后下载全文,论文总字数:36299字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

