论文总字数:27611字
摘 要
本文以南京地铁工程的隧道自动化监测系统为依托,介绍了南京地铁隧道结构安全的自动化监测系统及其监测方法和它的数据处理流程,并针对该系统的监测所获得变形数据,本文的变形数据均为沉降量,对其进行处理和分析,将神经网络模型应用到预测中,建立不同的预测模型,最终实现对隧道变形精度更高的预测,达到保障地铁安全运营的目的。
本文对变形数据的处理和分析,对沉降量的预测主要采用了时间序列模型和神经网络模型两种方法,建立了三种模型,分别对相同点相同时间段的沉降量进行数据处理。首先通过比较几种不同形式的时间序列模型,得出了对沉降量有最佳解释作用的时间序列模型,然后利用神经网络模型B-P算法对数据进行处理分析并与利用时间序列模型得到的处理结果进行比较,最后将神经网络模型与时间序列模型融合,对传统的处理方法进行改进,并将三种模型得到的结果进行对比分析,以确定对隧道沉降量的拟合和预测达到最佳效果的模型。数据处理过程均是对大量数据的处理,通过已有软件及老师的编程软件实现计算,从而得到可靠有效的成果。
关键词:地铁工程的自动化监测 结构变形 预测模型 时间序列模型 神经网络
Research on the deformation forecasting model of metro engineering structure based on Neural Network
摘要
Abstract
本文以南京地铁工程的隧道自动化监测系统为依托,介绍了南京地铁隧道结构安全的自动化监测系统及其监测方法和它的数据处理流程,并针对该系统的监测所获得变形数据,本文的变形数据均为沉降量,对其进行处理和分析,将神经网络模型应用到预测中,建立不同的预测模型,最终实现对隧道变形精度更高的预测,达到保障地铁安全运营的目的。
The Nanjing subway tunnel automation monitoring system as the basis, introduces the automatic monitoring system and monitoring method for Nanjing subway tunnel structure safety and its data processing flow, and according to the system of monitoring the deformation data, the deformation data are settlement, carries on the processing and analysis, application of neural network model to forecast, the establishment of different prediction models, ultimately achieve higher accuracy of prediction of the tunnel deformation, to ensure the safety of metro operation objective.
本文对变形数据的处理和分析,对沉降量的预测主要采用了时间序列模型和神经网络模型两种方法,建立了三种模型,分别对相同点相同时间段的沉降量进行数据处理。首先通过比较几种不同形式的时间序列模型,得出了对沉降量有最佳解释作用的时间序列模型,然后利用神经网络模型B-P算法对数据进行处理分析并与利用时间序列模型得到的处理结果进行比较,最后将神经网络模型与时间序列模型融合,对传统的处理方法进行改进,并将三种模型得到的结果进行对比分析,以确定对隧道沉降量的拟合和预测达到最佳效果的模型。数据处理过程均是对大量数据的处理,通过已有软件及老师的编程软件实现计算,从而得到可靠有效的成果。
The data processing and analysis of deformation, the settlement prediction mainly adopts the two methods of time series model and a neural network model, three models are established, respectively, the same point and the same time settlement data processing. First by comparing several different forms of time series model, it is concluded that the of settlement with time series model of the best interpretation of the role, of data for processing and analysis and obtained by time sequence model of results are compared and the B-P algorithm of neural network model, integrated the neural network model and time series model, to the traditional processing method was improved, and the results obtained by the three models are compared and analyzed, to determine the tunnel settlement fitting and prediction of the amount of reach the best model. Data processing is a lot of data processing, through the existing software and teacher programming software to achieve the calculation, and thus get reliable and effective results.
关键词:地铁工程的自动化监测 结构变形 预测模型 时间序列模型 神经网络
Key words: Subway Engineering, automatic monitoring structure deformation, prediction model, time series, neural network
目录
第一章 绪 论 5
1.1地铁工程结构变形预测的目的和意义 5
1.2变形预测分析的研究现状和进展 6
1.3本论文主要研究内容 7
第二章 地铁工程结构变形自动化监测 8
2.1引言 8
2.2 监测网的布设 8
2.2.1基准点组的布设 8
2.2.2工作基点的布设 9
2.2.3 监测点的布设 9
2.3 监测方法 10
2.3.1 基准网测量 10
2.3.2 监测点测量 10
2.4 数据处理 11
第三章 时间序列模型的建模与分析 11
3.1基本原理 12
3.2时间序列建模方法 13
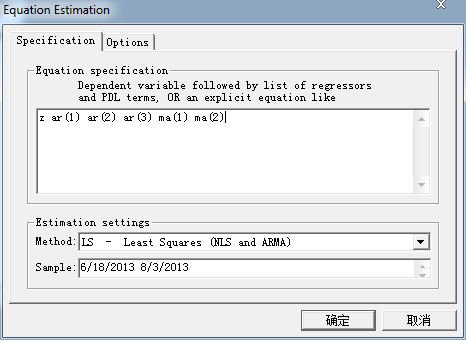
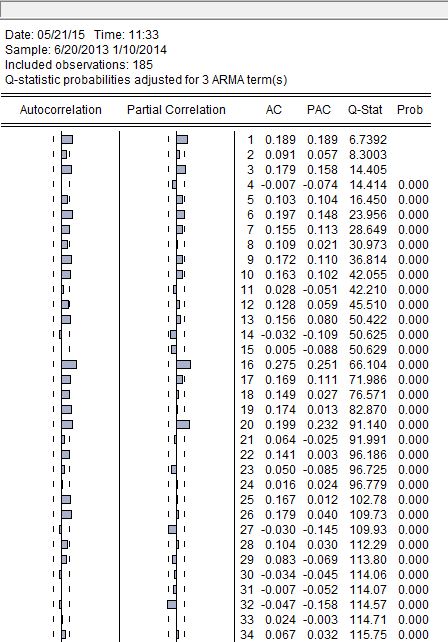
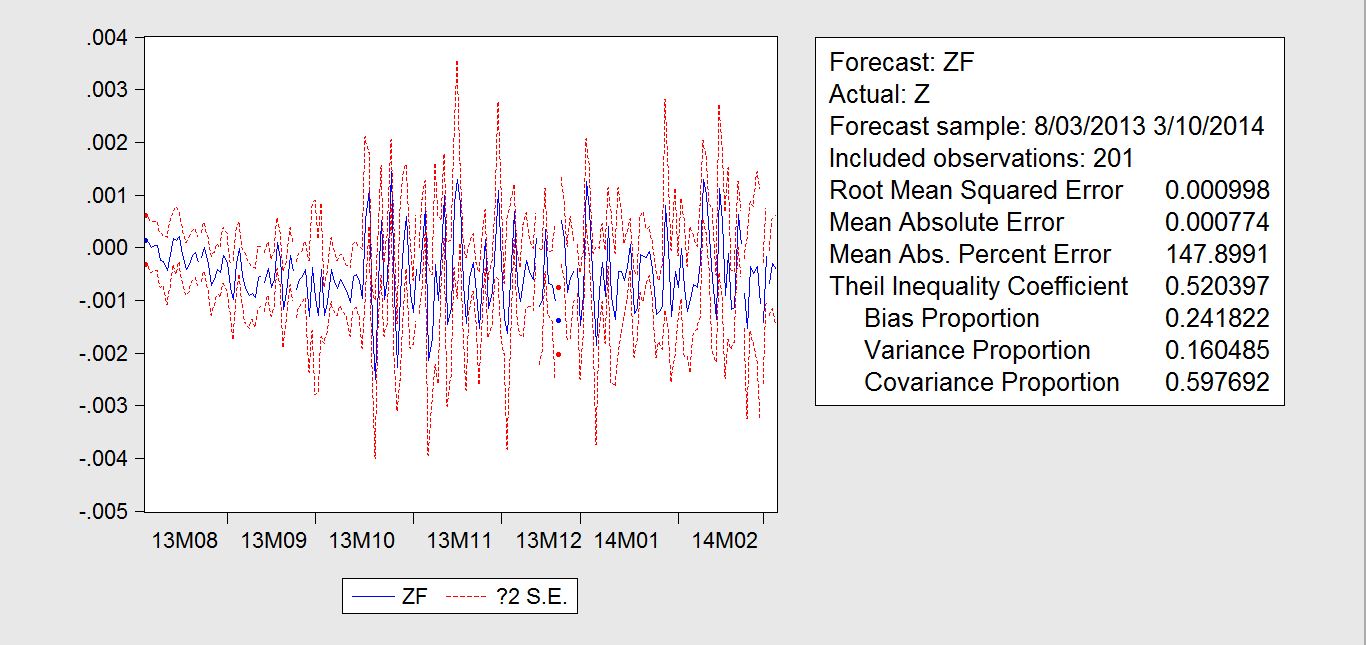
3.3实例分析 15
第四章 神经网络模型的建模与分析 22
4.1基本原理 22
4.1.1神经网络基本原理 22
4.1.2 BP神经网络模型结构 23
4.1.3 BP算法的计算模型 25
4.2实例分析 28
4.3时间序列与神经网络模型的融合 30
4.4三种模型的比较分析 33
第五章 结论与展望 34
5.1 结论 35
5.2 展望 35
致 谢 36
- 绪 论
1.1地铁工程结构变形预测的目的和意义
变形是一种自然界当中经常存在的现象,它是指变形体在不同种类的一些荷载的作用下,使其形状、大小以及位置发生了一定的变化,一定的范围内的变形是允许发生的,但是若超出了变形体的允许值就可能会引发一些灾难。自然界的变形危害现象很普遍,如地震、岩崩、地表沉降、桥梁隧道等建筑物的倒塌等,因而变形监测成为国内外学者共同关注的问题。
变形体包含了很多,大到整个地球,小到一个工程建筑物的某一块体,都算在其范围内,包含了人工和自然的构筑物,可以根据其范围将变形监测的研究对象分成全球性的变形研究、区域性的变形研究、工程和局部变形研究这3类
本论文的研究内容主要是针对精密工程测量中所得的数据进行变形分析和预测模型,比较具有代表性的变形体有大坝、桥梁、隧道、地表沉降等。根据不同的变形对象,所进行的变形监测内容不同。变形监测的内容主要包括:水平位移、垂直位移监测,偏距、挠度、弯曲、扭转、裂缝等的测量,而在本论文中的变形主要是以垂直位移来呈现。
地铁,是一种涵盖了都会地区各种地下与地上的路权专有、高密度、高运量的城市轨道交通系统,在许多城市中已担负起主要的乘客运输任务。城市地铁隧道工程的修建是目前缓解城市人口压力、改善城市交通条件的一项重要内容,地铁的建设工作对于一个城市的发展也有着重大的意义,目前国内外的地铁工程正在快速而大规模地开展着。
由于工程建设的施工阶段和运营阶段工程自身结构及地质等因素的影响地铁工程的隧道结构通常会产生一定的变形,这种变形在一定的限度范围内是正常的现象,可是超过了一定得限度便会对工程的正常进行以及社会公共秩序都会产生很大的影响。当超过范围限度内是,变形就必须引起足够的重视,并应采取适当措施进行预防或是处理,以防止对工程,对环境和对人造成不必要的破坏和损失。随着经济的高速发展,我国地铁工程建设的步伐越来越快,隧道是地铁工程的重要组成部分,数量也在快速得增加着,隧道结构在每个地铁工程中有着重要的作用,因为它所具有的特殊性,使得当其发生变形时,地铁无论在运营阶段和施工阶段的安全都得不到保障。因而如何能在保证隧道及其地铁工程安全的前提下,充分发挥地铁的作用,带给人们更为安全便利的交通,是一项重要的研究内容。地铁工程中的大部分的隧道普遍都配有监测系统,但这些监测系统通常仅仅对照明,通风,火灾等一些环境情况进行监测,不能对隧道的整体结构进行监测。而在已建立或正在建立的城市地铁工程中,在地铁工程的隧道附近或其上方所进行的非地铁施工方面的工程项目越来越多。这些工程项目某些可能会存在卸载,加载,降水或振动等施工程序,他们会对地铁工程的隧道结构产生一定的结构变形,如倾斜,位移,隆起或沉降等等一系列的影响。一旦该隧道的拱顶发生下沉,严重时甚至会导致坍塌,其所导致的后果将不可估量,因而,建立完善的监测系统并对变形分析及预测进行研究有着重要意义,目前这些方面的内容也引起了国内外学者的重点关注。
但目前所建立的监测系统的监测工作主要是针对地铁工程其隧道施工过程中的监测,对于其运营后的监测工作则相对较少,建立合理的模型, 对地铁工程的隧道结构变形做出更为准确的预测,以便可以通过预测及时发现问题,从而采取合适的加固措施, 以此来避免或减少事故的发生,是非常重要的。更为准确地预测以此更为有效地控制施工过程中可能引起的过大的地表沉降, 确保施工范围内周边一些建筑物以及地下管线的安全, 已经成为城市地铁工程隧道建设中所必须解决的一项非常重要的内容. 所以建立合理的预测模型, 对地表的沉降做出更为准确的预测, 从而可以尽量避免或减少工程中及运营阶段的事故的发生是很重要的。
1.2变形预测分析的研究现状和进展
变形预测分析的研究内容包括变形的几何分析、变形物理解释和变形预测等多个方面。一般可将其分为变形的数据分析及处理和其物理解释这两部分,变形的数据分析与处理实质上是通过一系列的数据对变形体的形状和大小的变形作几何分析;变形的物理解释的任务则是确定变形体的变形与其原因之间的关系,以此来解释变形的原因,本论文所研究的内容是针对变形的数据分析及处理,即对变形体进行几何分析。
传统的对于变形体的几何分析主要有对参考点的稳定性分析,对观测值的数据进行平差处理和精度评定,和变形模型的参数估计等内容。在变形的几何分析中,需要对观测值的数据进行平差处理,其数据的质量是非常重要,数据的质量直接关系到最终变形值的精度和可靠性,在这个方面上,主要涉及的内容包括,观测值的质量,粗差的处理、平差基准的选取、变形的可区分性等等。我国著名学者陶本藻在1984年对“自由网平差”的概念进行了发展和完善,瑞士一名叫做Keller的工程师在1976年扩展了这种“内制约”的平差方法。以色列的一名学者Gilad Even-Tzur在2010年时提出了扩展的附有条件的“自由网平差”。我国学者周江文于1980年提出了“拟稳平差”的概念,通过“拟稳定点”来定义监测网的参考系。美国的工程师W.Prescott于1981年提出了命名为“外坐标”的平差法,以此用于分析地质断层两边地壳的相对运动。德国的学者H.Pelzer于1971年开始应用统计检验的理论来分析监测网中参考点的稳定性,随后,其它国家的各位学者也提出了不同的方法,我国测量学者陶本藻在1991年提出了一种统一的假设检验方法,我国的陈永奇教授在1983年推导出了一种广义的假设模型,而在粗差检验方面,在荷兰教授W.Baarda于1968年提出“数据探测法”后,关于粗差的检测,以及变形的可区分性的研究成果已经相当的丰富,这在陶本藻[1992]、杨元喜、黄幼才、周江文、李德仁[1988]等学者的著作中都有很好的体现。随着变形研究的深入开展,尤其是控制论、信息论、运筹学、系统动力学、模糊数学和灰色理论等构成的系统科学体系的兴起以及其在变形领域中发挥的重大作用。
变形监测数据的处理与分析是一个复杂的系统工程。进行变形分析及预测的模型有很多种, 根据不同的工程特点采用不同的模型。时间序列模型为目前最优的解决模型,利用神经网络建立地铁工程的结构变形预测模型还比较空白,而如能应用神经网络理论,利用神经网络的模型进行地铁工程结构变形的预测,将会提高预测的精度,对实际工程有着重要的意义。
1.3本论文主要研究内容
(1)学习测量平差、误差传播定律及其应用;学习地铁工程安全监测有关知识。
(2)到示范工程现场进行踏勘,了解地铁工程安全监测的要求,了解示范工程具体情况;收集示范工程的地铁工程安全监测数据资料;了解利用Leica公司生产的测量机器人TM30,基于空间后方交会原理实现地铁隧道结构安全自动化监测的过程。
(3)根据地铁工程安全监测数据资料,利用时间序列模型,研究变形预测模型;
(4)基于神经网络的地铁工程变形预测模型研究(包括网络结构、模型建立与应用效果分析等)
(5)对神经网络B-P算法改进将时间序列模型与神经网络模型融合进行预测,得出更优化的模型。
- 地铁工程结构变形自动化监测
2.1引言
本论文是以该南京地铁隧道结构安全自动化监测系统为依托,所应用的沉降量数据也来自该系统的监测,所以对地铁工程隧道结构的自动化监测系统的学习和研究也是本文一个重要方面。在本章中,将介绍地铁工程隧道中监测网的布设、监测方法以及在获得监测数据后如何对数据进行处理,从而获得变形分析和预测结果。
该系统中采用了四套Leica TM30测量机器人进行自动的变形数据采集,采用自主开发的南京地铁隧道结构自动化监测系统进行管理,该系统结构如下图2.1所示。

图2.1 自动化监测系统结构示意图
2.2 监测网的布设
2.2.1基准点组的布设
基准点作为变形监测的起始依据,保证它的稳定性十分重要,基准点需远离变形区80~120米外,基准点组的布设如下图2.2所示。
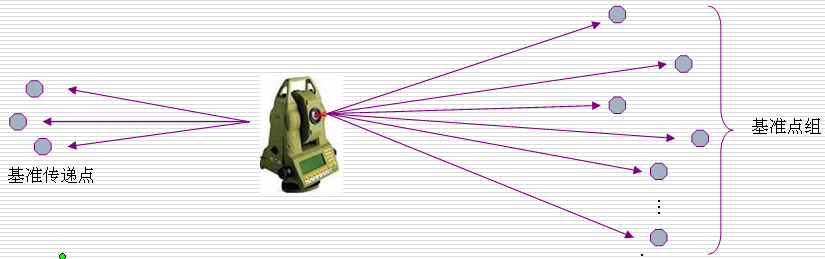
图2.2基准点组布设示意图
2.2.2工作基点的布设
依据Leica TM30(0.5″,0.6 1ppm)这款仪器的标称精度以及隧道内的实测数据的结合进行分析,可以推算出这个仪器在测距100m的范围内,它的三维测量精度达到了1mm以内,所以在工作基点沿监测区间(左、右行线)每隔150m左右,设置一个强制对中支撑,用来架设测量机器人以便可以进行数据采集。强制对中支撑的安置如下图所示,满足了《城市轨道交通工程测量规范》的相关要求,。
 图2-3强制对中观测支撑
图2-3强制对中观测支撑
2.2.3 监测点的布设
自动化监测。其点的的布设位置与人工监测相同。车站部分布设1-2个监测点,隧道区间部分每个断面设置3-6个监测点,在公共断面安置360°棱镜,其余断面放置永久性L型棱镜。

图2-4断面观测棱镜布设实际图(亮光的地方是在灯光照射下的棱镜)
2.3 监测方法
2.3.1 基准网测量
(1)基准网高程测量
基准网的高程测量基准为基准点组,第一次采用任意设站三角高程法,与相应位置的人工高程基准点进行联测。
(2)基准网平面坐标测量
由一个工作基点与基准点组构成了监测网的坐标框架,采用极坐标法得到基准网的初始坐标值(其值需要观测两次,两次坐标计算值的互差不得大于1.2mm),计算完成后取各次的平均值作为各基准点的初始坐标值,其余工作基点的平面坐标可以通过自由设站法解算获取,
2.3.2 监测点测量
在每个工作基点上放置测量机器人,与RTU相连接,通过南京隧道结构变形自动化监测系统对多台测量机器人协同左腋下进行各个点的数据采集和数据通讯管理,首次对数据进行采集的时候需要进行学习测量,之后便可以采用四台测量机器人24小时对地铁隧道进行安全监测,以便随时可以发现地铁工程隧道结构的形变。监测网测量要求以及全站仪主要技术参数见下表。
表2.1 监测网测量要求
使用仪器 | 测回数 | 2C及指标差(〞) | 距离测量较差(mm) | ||
水平角 | 垂直角 | 2C | 指标差 | ||
LeicaTM/TS30 | 1 | 1 | 6 | 6 | 2 |
表2-2 全站仪的主要技术参数表
仪器型号 | 测角精度 | 测距精度 |
LeicaTM30 | 0.5" | 0.6mm 1ppm |
初始值的数据应该进行连续的测量两次得到,当这两次X、Y、Z之间的差值都小于1.5mm时,取中数作为初始值,如若大于1.5mm,则应该重测直至符合要求为止。
2.4 数据处理
剩余内容已隐藏,请支付后下载全文,论文总字数:27611字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

