论文总字数:19413字
目 录
1绪论 1
1.1研究对象 1
1.1.1气象塔 1
1.1.2气象塔垂直度 1
1.2研究目的和意义 2
1.3垂直度测量方法 2
1.3.1传统测量方法 2
1.3.1.1吊垂线法 2
1.3.1.2正、倒垂线法 2
1.3.1.3经纬仪测量法 2
1.3.2现代测量方法 2
1.3.2.1激光铅直仪观测法 2
1.3.2.2激光位移计自动记录法 3
1.3.2.3经纬天顶仪及天底仪竖向投测法 3
1.3.2.4 GPS测量 3
1.3.2.5全站仪测量 3
1.3.2.6三维激光扫描 3
2气象塔垂直度测量控制网的建立 4
2.1气象塔概况 4
2.2控制点的选取 5
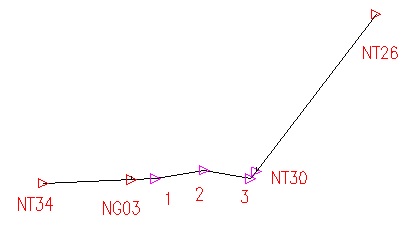
2.3控制网的建立 6
2.4导线测量 6
3气象塔垂直度测量方法 8
3.1前方交会法 8
3.2全站仪免棱镜法 8
3.2.1全站仪免棱镜 8
3.2.2免棱镜全站仪的特点 9
4气象塔垂直度测量 9
4.1目标点选取 9
4.2 方向交会法 9
4.2.1施测 9
4.2.2数据处理 10
4.2.3垂直度计算 12
4.2.4结果 12
4.3全站仪免棱镜观测 13
4.3.1测量 13
4.3.2数据处理 16
4.3.3结果 16
4.4 结论 17
4.5观测过程中注意事项 17
5总结 18
参考文献 18
致 谢 19
气象塔垂直度观测方法探讨
许春节
,China
Abstract: Meteorological tower is an equipment which is used to measure atmospheric temperature, humidity, wind speed and wind direction and other meteorological elements .This paper introduces the traditional and modern measurement methods of meteorological tower’s verticality, and these methods ‘ characteristics.It highly introduces about using total station reflectorless and direction intersection to measure the verticality.At the same time, it analyzes these methods in specifical measurement, drows the total station reflectorless is the best method to measure the meteorological tower’s verticality.
Key words:meteorological tower; verticality; verticality measurement; total station reflectorless; direction intersection method
1绪论
1.1研究对象
1.1.1气象塔
气象塔是用于观测大气边界层的气象要素垂直分布的设施,气象塔上安装观测气象要素的仪器,其安装的高度根据具体的需要和可能来决定,一般上疏下密,采用对数等间距的方式分布。塔上安装有测量温度、湿度和风速的仪器。如图1。

图1 气象塔
1.1.2气象塔垂直度
垂直度是位置公差,用于评价直线与直线之间、平面与直线或平面之间是否垂直。其评价基准可以是直线,也可以是平面,直线是指被测物体的直线部分在竖直方向上的偏移量或直线运动轨迹,平面是指被测物体的平面部分在竖直方向的偏移量或运动轨迹形成的平面。
气象塔垂直度是指塔体主轴线相对于地平面的垂直状态,通过测量气象塔顶部中心相对于底部中心的位移量来计算垂直度,塔的垂直度规范为1/1500。
1.2研究目的和意义
随着气象事业的快速发展,气象观测塔如雨后春笋般建立在我国的各大城市中,大于1吨重的钢铁材料矗立在地面上将会改变该地表的原始地质结构,同时在外部压力的作用下地基将会产生倾斜等一系列复杂的变形,变形量若超过其结构或材料的限度,将会导致气象塔的坍塌。通过观测气象塔的垂直度,对其实施垂直度的变形分析,快速的掌握塔体的竖直情况,能够及时的发现塔体异常并做出正确的处理,确保气象塔的正常使用和安全性。
1.3垂直度测量方法
1.3.1传统测量方法
1.3.1.1吊垂线法
这种方法是一种相对古老的传统方法,在气象塔的顶部或所需观测高度的目标点上,直接或支出一点悬挂重力球和高强钢丝,通过钢丝吊起锤球的方式,在垂线下的下方安放格网读数板和其他读数设备,读出或者量出塔的顶部目标点相对底部目标点的水平位移量和位移偏离方向。该方法简单,但是受外界因素的影响较大,如风力、偏离方向是否是在正方向等等,同时不能在塔的顶部或其他地方安置垂线,塔的底部不是一块平地无法安放读数设备,因此,只能说是实施起来比较困难,难度较大。
1.3.1.2正、倒垂线法
采用正垂线法测量时,垂线顶端可以固定在气象塔的最高点或所需高度处设置的目标点上。使用倒垂线法测量时,垂线底端可安置在锚块上,顶端设浮筒。该方法测量时可以直接得到塔顶部相对于底部目标点的位移量,简便快速,该方法测量时受风力的影响较大,同时实际测量时不能在塔的顶部安放垂线,所以该方法不具有实际操作性。
1.3.1.3经纬仪测量法
A、投点法:测量时,在塔的第一层目标点位置上安置水平读数尺等设备。在所有的控制点上安置经纬仪投影时,采用正倒镜法测出每一对目标点间的水平位移增量,从而计算出塔的垂直度,根据事先建立的坐标系统求出位移方向(倾斜方向)。
B、测水平角法:测量气象塔时,每测站观测前应该将已知坐标的控制点作为后视方向,测出塔上各目标点的水平角和至塔底部中心的距离,计算顶部中心相对第一层中心的水平位移分量,根据计算出位移量,同时根据建立的坐标系统分析出塔的倾斜方向。
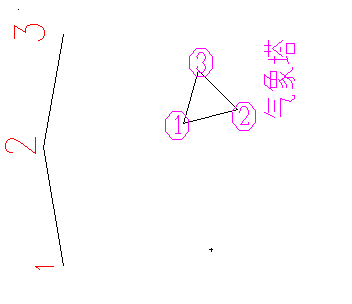
C、前方交会法:根据测量目标点与测站点之间的夹角,利用测量学中前方交会的坐标计算公式计算出塔底部和所需高度的目标点的X、Y坐标,根据目标点坐标通过坐标拟合的方法计算出所需高度和底部的中心坐标,求出二者的水平位移分量通过,事先建立好的坐标系统分析出塔的倾斜方向。观测时应多周期观测以测量出垂直度的变化趋势。
1.3.2现代测量方法
1.3.2.1激光铅直仪观测法
在塔的顶部中心安放接收靶,在该中心点竖直向下的地面点上安置激光铅直仪,观测时接收靶接收激光铅直仪发出的激光,在接收靶上直接读取或量出顶部中心点的水平位移量和位移方向。该方法测量速度快,不需要控制点,但是实际测量时不能在顶部架设仪器,因此激光铅直仪观测法不具有实际操作性。
1.3.2.2激光位移计自动记录法
位移计宜安置在塔的底部,接收装置可设在需要观测的楼层,当位移计发射激光时,测量人员可以在测试室的光线示波器上直接获取到位移图像和相关的参数,并主动记录结果,根据位移图像得出位移量,从而计算出塔的垂直度。此方法测量的时候不需要布设控制点,直接在目标点上架设仪器就可以完成测量工作,减轻了作业强度,但是实际测量时,无法在塔上安装测量仪器,因此该方法实际操作十分困难。
1.3.2.3经纬天顶仪及天底仪竖向投测法
经纬仪在控制点上经过整平对中后,将望远镜竖直向上,调整视准轴与竖轴方向,使二者在竖向方向保持同一方向,固定后进行目标点投测。在塔的顶部放置目标分划板,通过移动分划板使板的十字丝交点与望远镜的十字丝重合,则该点就是底部目标点在顶部投测的位置,通过量取顶部中心点和该投测点的距离可以得到轴线的位移偏移量从而计算出塔的垂直度。天底仪与经纬仪天顶仪投测方向正相反,是从上往下把目标点引测到施测层上去的。因为该气象塔底部空间十分小无法架设经纬天顶仪,同时无法在顶层架设分划板,所以该方法不具有实际操作性。
1.3.2.4 GPS测量
气象塔很高,仰角非常大,塔内空间很小,因此不能在塔内布网,所以选择在塔外布网,为了对塔进行全面的观测,需在塔附近布设一条图根导线,在塔内设一个GPS点。将一台GPS 接收机作为基准站,另一台接收机安装在塔顶的几何中心进行观测。采用载波相位相对定位测量,整点前后各取(10 min)解算每测段该气象塔顶点相对于基准站的坐标( X,Y) 作为其整点坐标。塔顶的几何中心架设钢架天线,基准站的坐标采用高精度全站仪测量、由塔首层控制网点坐标推求。塔首层( X0、Y0)则由塔首层控制网点解析计算得到。GPS测量速度快,大大提高了工作效率;该方法测量时需要在目标点上架设接收机,而实际测量时由于塔不可攀爬,所以无法在塔的目标点架设GPS接收装置。
1.3.2.5全站仪测量
全站仪可以直接测出建筑物的三维坐标就可以计算这样接可以计算成果在同一竖直方向上的两个点的位移量,根据位移量计算出建筑物的倾斜度。测量时在已知点上架设仪器,测量出目标点的坐标,最后将这些目标点的坐标转换到统一的坐标系统中,通过计算出塔底层和顶部重心坐标的差值,计算得出塔的垂直度。
在控制点上架设全站仪,输入测站点和后视点的坐标、仪器高和棱镜高以后进行气象塔目标点的三维坐标测量,测量时需要在目标点上架设棱镜,在实际测量过程中无法在目标点上安置棱镜,或安置棱镜后,随着时间的推移,棱镜位置可能会发生变形而无法爬上气象塔进行纠正,所以该方法不具有实际操作性。
1.3.2.6三维激光扫描
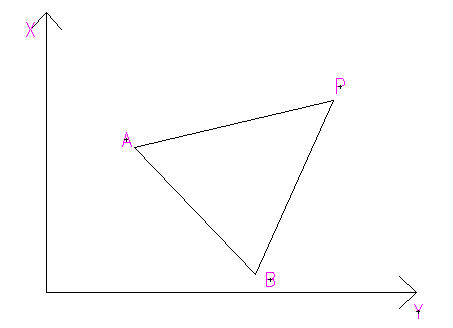
此方法是近几年兴起的一种新方法,该方法通过激光扫描塔体表面可以获得气象塔表面的点的坐标,通过每一层三个角点的坐标进行坐标拟合可以得到重心点的坐标,从而计算出第一层与顶部重心的位移矢量,利用位移量和高度计算出垂直度。因激光三维扫描的局限性,在一个测站点扫描不可能获得完整的点云数据,因此需要在多个测站上扫描,扫瞄时应保证仪器处于竖直状态,同时周围应排除热源、振动源等影响观测精度的因素;为提高点云拼接精度,根据控制网布设理论,拼接靶球的摆放应形成较好的空间几何形状,同时处于不同平面中。
因三维激光扫描仪器自身精度的限制,切片后的点云连线与物体表面并不完全一致,切片边界不清晰,无法直接得到多边形顶点坐标。为求顶点坐标,采用下述方法,并利用计算机语言编程实现:1)利用最小二乘法,拟合出三角形的边;2)利用拟合出的边求出三边形的顶点;3)计算三角形的重心。
剩余内容已隐藏,请支付后下载全文,论文总字数:19413字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

