论文总字数:33332字
摘 要
我国北斗卫星导航系统是一个正在建设的全球导航定位系统,这一现状要求我国对于北斗系统需要不断的积极推进。针对使用北斗三频数据进行伪距差分定位时,多路径误差和观测噪声大的问题,本文研究了北斗三频伪距差分定位与相位平滑伪距差分定位的原理与模型,利用自编的北斗三频伪距差分定位程序,对河南的五条实测基线数据进行不同方式的定位解算,最后使用MATLAB对不同解算结果的定位误差进行绘制,并统计了相应定位中误差。
本文的主要研究内容和结论总结如下:
- 本文阐述了北斗三频伪距测量,相位平滑伪距测量的基本原理,并且介绍了北斗观测数据的相关误差和三频周跳探测的方法等。
- 本文分析了北斗三频B1 B2 B3的伪距噪声,得出了B3的伪距噪声明显低于B1和B2的伪距噪声的结论。并且随着基线的增长,每个频率上的伪距噪声并没有明显的变化。
- 本文实现北斗三频的伪距差分和相位平滑伪距差分的程序的编制,并且绘制了北斗三频伪距差分相关程序的解算流程。
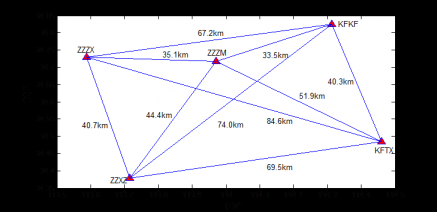
- 本文对于河南的实测数据进行了伪距差分定位和相位平滑伪距差分定位的实验,得出的实验结论是:
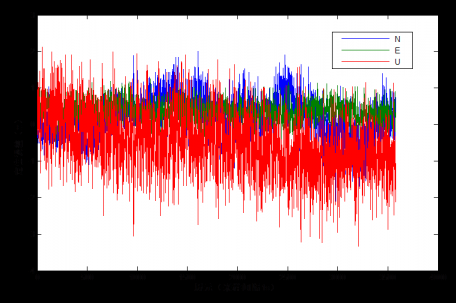
(1)对于同一条基线中的NEU,U的定位误差明显大于N和E,可以得知北斗定位的高程精度不如平面精度。对于一条80km的基线,平滑后平面内的精度可以到达0.41m,高程上的精度可以达到0.97m,与GPS的定位精度处于同一水平。
(2)随着基线的增长,定位误差变大。对于33.5km的基线和84.6km的基线,平滑后33.5km的基线N方向的定位误差为0.54m,E方向的定位误差为0.22m,U方向的定位误差为0.72m;84.6km的基线N方向的定位误差为0.55m,E方向的定位误差为0.31m,U方向的定位误差为0.80m.。由此可以看出,基准站与流动站之间的距离对伪距差分的精度有很大的影响,距离越大,误差越大,这主要是由于电离层的空间相关性决定的,距离越大,电离层空间相关性越弱,残差越大。
(3)对于一条80km的基线,相位平滑可以提高伪距差分的定位精度,根据实验结果可知,正常伪距差分N方向的定位误差为0.56m,E方向的定位误差为0.37m,平面内精度可达0.67m,高程上的精度可以达到1.25m,而经过相位平滑之后,N方向的定位误差为0.37m,E方向的定位误差为0.18m,平面内精度可达0.41m,高程上的精度可以达到0.97m,说明北斗相位平滑伪距差分可以有效地抑制多路径效应和伪距测量噪声影响,提高定位精度。
总体来说,北斗三频伪距差分的定位水平可以达到较高精度的需求,但是使用北斗三频的观测值有望获得更高精度更具可靠性的导航定位结果。故本文的研究对于加快北斗系统在实践生产中的应用,获得高精度的定位效果具有实际的意义。
关键词:北斗,三频,伪距差分,相位平滑,定位精度
A STUDY ON THREE-FREQUENCY PSEUDO-RANGE DIFFERENTIAL POSITIONING BASED ON BEIDOU
Abstract
 BeiDou satellite navigation system in our country is a global navigation and positioning system is under construction, the present situation demands that we need to constantly promoting for the BeiDou system. For using BeiDou three frequency according to the pseudo-range differential positioning, the problem of multipath errors and observation noises, this paper studies the BeiDou three frequency pseudo-range differential positioning and the principle of phase smoothing pseudo-range differential positioning with the model, using the pseudo-range differential positioning program which includes three frequency, measurement baseline data of Henan five different ways of positioning, finally USES MATLAB to draw different calculating results of positioning error, and statistics of the corresponding positioning error.
BeiDou satellite navigation system in our country is a global navigation and positioning system is under construction, the present situation demands that we need to constantly promoting for the BeiDou system. For using BeiDou three frequency according to the pseudo-range differential positioning, the problem of multipath errors and observation noises, this paper studies the BeiDou three frequency pseudo-range differential positioning and the principle of phase smoothing pseudo-range differential positioning with the model, using the pseudo-range differential positioning program which includes three frequency, measurement baseline data of Henan five different ways of positioning, finally USES MATLAB to draw different calculating results of positioning error, and statistics of the corresponding positioning error.
The main research contents and conclusions of this article summarized below:
1. This paper expounds the BeiDou three frequency pseudo-range measurement, the basic principle of phase smoothing pseudo-range measurement, and introduces the Beidou related error of observation data and three detection methods such as frequency.
2. This paper analyzes the BeiDou three frequency B1 B2 B3 pseudo-range noise, it is concluded that the B3 pseudo-range noise significantly below the conclusion of the pseudo-range noise B1 and B2. And as the growth of the baseline, the pseudo-range noise in each frequency and no obvious change.
3. This paper realizes the BeiDou three frequency pseudo-range differential and phase smoothing pseudo-range differential program, and draw the BeiDou three frequency pseudo-range differential calculation of relevant procedure process.
4. In this paper, the test data for Henan the pseudo-range differential positioning and phase smoothing pseudo-range differential positioning experiment, the experimental conclusion is:
(1) for the same baseline of NEU, U is bigger than the positioning error of the N and E, shows the height accuracy of the BeiDou positioning precision than plane. After the baseline for a 80 km, smooth plane precision can reach 0.41 m, on elevation accuracy can reach 0.97 m, can be reached the level of GPS positioning.
(2) as the growth of the baseline, position error. The baseline for a 33.5 km and 84.6 km of the baseline, smooth after 33.5 km of baseline N direction positioning error is 0.54 m, E direction positioning error is 0.22 m, the positioning error is 0.72 m in the U direction; 84.6 km of baseline N direction positioning error is 0.55 m, E direction positioning error is 0.31 m, the positioning error is 0.80 m. in the U direction. Thus it can be seen that the distance between the base station and rover of pseudo-range difference accuracy have great influence, the greater the distance, the greater the error, this is mainly due to the spatial correlation of the ionosphere, the greater the distance, the weaker the ionosphere spatial correlation, the greater the residual error.
(3) for a 80 km baseline, phase smoothing pseudo-range differential can improve positioning accuracy, according to the result of experiment shows that the normal pseudo-range difference N direction positioning error is 0.56 m, E direction positioning error is 0.37 m, plane precision can reach 0.67 m, on elevation accuracy can reach 1.25 m, and after phase smoothing, N the direction of the positioning error is 0.37 m, E direction positioning error is 0.18 m, plane precision can reach 0.41 m, on elevation accuracy can reach 0.97 m, shows BeiDou phase smoothing pseudo-range difference can effectively suppress the multipath effect and pseudo-range measurement noise effects, improve the positioning accuracy.
BeiDou three frequency, in general, the pseudo-range differential positioning level can achieve the high precision demand, but using observed value is expected to get higher accuracy of BeiDou three frequency more reliability of navigation and positioning results this paper studies application in practical production, to speed up the BeiDou system for high precision positioning effect is of great importance.
KEY WORDS: BeiDou , three frequency , pseudo-range difference, phase smoothing, Positioning accuracy
目录
第一章 绪 论 1
1.1 引言 1
1.2北斗卫星导航系统概况 1
1.3国内外研究现状 4
1.4 本文主要研究内容 5
1.4.1 研究目的 5
1.4.2 本文主要结构 5
第二章 北斗观测数据误差分析 7
2.1 与卫星相关误差 7
2.2 与信号传播相关误差 7
2.3 与接收设备相关误差 9
2.4 测码伪距噪声分析 10
第三章 三频数据周跳探测 13
3.1 周跳探测的定义 13
3.2 周跳探测的方法 13
3.2.1 基于MW组合的周跳探测方法 14
3.2.2 无几何组合的周跳探测方法 14
3.2.3 电离层残差法的周跳探测方法 14
3.2.4 Kalman滤波法的周跳探测方法 15
3.2.5 三差法的周跳探测方法 15
3.3 本章小结 15
第四章 北斗三频伪距双差定位原理及实验实施 16
4.1 基本定位方法 16
4.1.1 伪距测量 16
4.1.2 相位平滑伪距测量 18
4.2 北斗三频伪距双差定位 20
4.1.1 北斗三频伪距双差定位实验数据 20
4.2.2北斗三频伪距双差定位实验结果 20
4.3 北斗三频相位平滑伪距双差定位 22
4.3.1 北斗三频相位平滑伪距双差定位实验数据 22
4.3.2 北斗三频相位平滑伪距双差定位实验结果 23
4.4 实验结果分析 25
第五章 程序编制 26
5.1 程序设计需求 26
5.2 程序结构 26
5.3 程序功能设计 26
5.4 程序实现 28
第六章 总结与展望 30
6.1 总结 30
6.2 展望 31
致谢 32
第一章 绪 论
1.1 引言
北斗卫星导航系统(BeiDou Navigation Satellite System)从2012年12月正式运营开始,是我国独立研发的导航定位系统,和当今已经组织运行非常完善的GPS全球卫星导航系统相比BDS是一个处于建设中的定位系统,不断完善和促进BDS导航定位系统对维护我国国家在全球中的地位、经济发展建设、推动社会发展有重要的意义。随着BDS的不断发展必将改变GPS的垄断地位,增强我国维护国家权益的能力,增强我国的综合国力。
北斗系统具有独特的自身特点是短报文通信,与美国GPS系统相似的特点是全球范围内的覆盖、全天候时间的访问、隐蔽性好且定位方式是被动的特性。与GPS双频信号不同,北斗系统播发三个频率的信号,这就决定了不同频率之间可以形成更多的线性组合,这为周跳探测提供了新的方法和途径。除此之外,三频伪距双差的定位效果也值得深入研究,本文正是基于此课题而开展研究工作。
北斗单点伪距的测量精度受众多因素的影响,比如与卫星相关的卫星星历误差,卫星钟误差,相对论效应,在传播过程中的电离层延迟,对流层延迟,多路径效应,与接收机有关的接收机钟差,接收机噪声等。削弱或消除上述误差的方法有建立误差改正模型,比如无电离层组合消除电离层延迟,霍普菲尔德模型消除对流层延迟等。对于一些残差比如多路径效应和观测噪声,如果可以选择恰当的观测条件,就可以排除多路径和噪声的误差。但是伪距单点定位的精度不高的原因是经过各项改正之后,残余误差仍然很大,导致定位结果受到影响。北斗差分的出现可以很好的提高定位精度,目前北斗的差分精度在平面内可以达到1m之内,高程方向高于1.5m,满足较高精度的要求。
差分按观测类型可以分为伪距差分和相位平滑差分。伪距差分数据处理方便,但是精度不高;相位差分精度高,但是需要进行周跳探测和整周模糊度的确定,数据处理复杂。相位平滑伪距差分是介于两者之间的一种算法,它同时利用载波相位和伪距的观测值,根据载波相位历元间的变化来平滑伪距,从而得到虚拟的伪距值,将虚拟的伪距值带入观测方程,来提高伪距观测的精度。通过实验数据表明,相位平滑伪距差分比伪距差分数量级提高了一个数量级。
在研究伪距差分算法的同时,有一个问题需要着重解决:载波相位的周跳问题。采用有效的技术手段探测周跳,是保证定位精度的前提。三频周跳探测的方法有很多,采用合适的方法可以达到快速准确探测周跳的目的。
三频伪距差分与双频的不同,它需要保证噪声的平方和最小来提高定位的精度,本文利用北斗双频和三频分别做了伪距双差的实验,通过结果来表明三频伪距差分的优势。
1.2北斗卫星导航系统概况
北斗卫星导航系统(BeiDou Navigation Satellite System)是我国正在实施的自主发展、独立运行的全球卫星导航系统,是与世界其他卫星导航系统兼容共用的全球卫星导航系统,区域系统已于2012年完成组网并正式开通运行[2]。
北斗系统的组成部分是空间卫星星座部分、地面控制运控部分和用户终端设备部分。
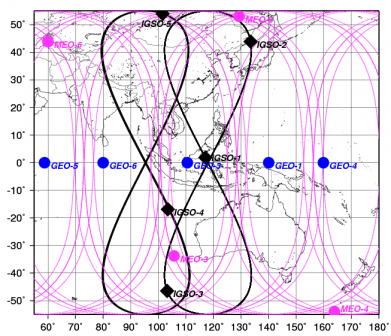
空间星座:由5GEO/5IGSO/4MEO星座组成,5个GEO分别定点于东经58.75°、80°、110.5°、140°、160°;5个IGSO分布于三个轨道上;4颗MEO轨道高度为21000公里,为7天13圈回归周期,星下点轨迹如图所示:
剩余内容已隐藏,请支付后下载全文,论文总字数:33332字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

