四旋翼直流无刷无位电机调速功能的实现毕业论文
2020-05-23 16:22:08
摘 要
四旋翼飞行器是一种新型的无人自主飞行器,,被广泛用于生产生活和军事方面。四旋翼飞行器比较小巧,能够灵活的以各种速度向各种方向飞行,安全系数也比较高,它还能代替人进入各种恶劣的环境,因此有着相当重要的研究价值。本文所研究的是控制四旋翼飞行器的速度,在飞行器飞行过程中起到很重要的作用。
本文在无刷无感直流电机的工作原理的基础上,结合PID 控制算法,通过TMS320F28335 DSP微控制器实现了对电机的调速。在CCS5.3编程环境下,采用C语言编程,软件实现了PWM波形的产生和改变以及电路的检测,过零点换相和PID控制算法。
实验结果表明,能够成功地输出PWM波并且可以通过改变PWM的占空比对电机进行调速。
关键词:无刷无感直流电机 TMS320F28335 PID控制
Abstract
Four rotor aircraft is a new type of unmanned aerial vehicle, which is widely used in the production of life and military aspects. Four rotor aircraft relatively compact, can be flexible in a variety of speed to fly in all directions,the safety factor is relatively high. It can replace people to enter a variety of harsh environment, and therefore has a very important research value. The research of this paper is to control the speed of the four rotor aircraft, which plays a very important role in the process of flight.
Based on the working principle of Brushless DC motor, this paper combined with the PID control algorithm, the speed control of the motor is realized by the DSP TMS320F28335 microcontroller. In CCS5.3 programming environment, the use of C language programming, software implementation of the PWM waveform generation and change as well as circuit detection, zero crossing phase change and PID control algorithm.
The experimental results show that the PWM wave can be successfully output and the motor can be changed by changing the duty ratio of PWM.
Keywords: Brushless DC Motor without position ; TMS320F28335; PID control
目 录
摘 要 I
ABSTRACT II
第一章 绪论 1
1.1 引言 1
1.2 课题背景及研究目的和意义 1
1.3 国内外的研究现状 2
1.3.1 国外研究现状 2
1.3.2 国内研究现状 2
1.4 本文所做的工作 3
第二章 TMS320F28335 DSP芯片模块的介绍 4
2.1 DSP28335的介绍 4
2.2 ePWM模块 5
2.3 eCAP模块 5
第三章 无刷无感直流电机控制算法实现 7
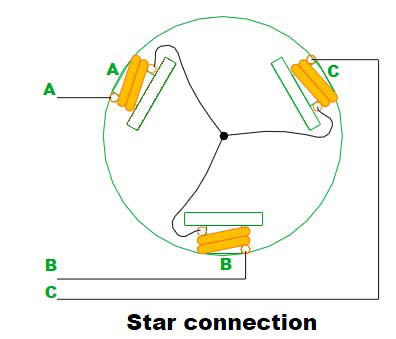
3.1 无刷无感直流电机的基本结构和特点 7
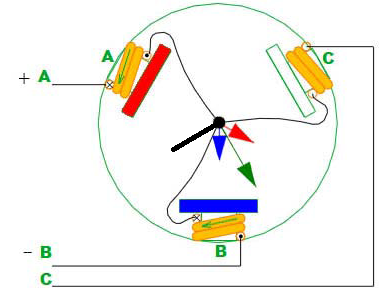
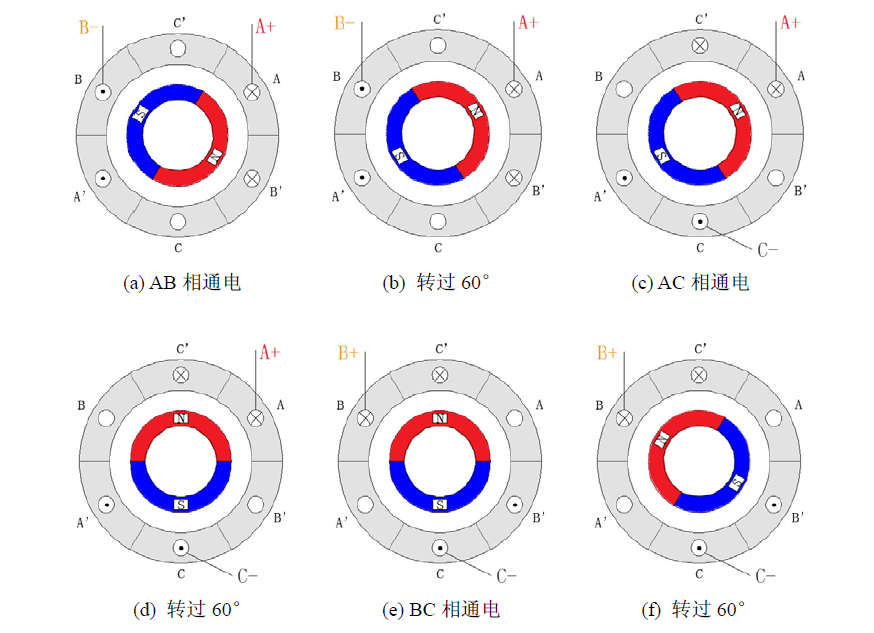
3.2 无刷无感直流电机的工作原理 8
3.3 无刷无感直流电机的控制思想 9
3.3.1 转子位置与过零点检测 9
3.3.2 PWM波形的产生与改变 10
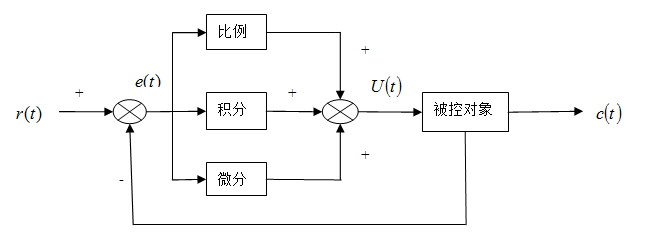
3.4 PID算法的软件实现思想 12
第四章 控制系统软件设计 16
4.1 主程序的设计 16
4.2 PWM信号产生程序的设计 17
4.3 AD采样 18
4.4 自检程序的设计 19
4.4.1 检测六个MOSFET的短路特性 20
4.4.2 检测A 、B 、C 的导通特性 20
4.4.3 检测A-、B-、C-的导通特性 20
4.5调速程序的设计 20
4.5.1 增速和减速 20
4.5.2 接受指令调速 21
第五章 总结与展望 22
5.1 总结评价 22
5.1 展望 22
参考文献 23
致 谢 25
第一章 绪论
1.1 引言
四旋翼无人飞行器(Quadrotor)是一款由四个相互独立的直流电机自身拥有动力设备控制的小型无人驾驶的飞行器,它的状态是通过无线传输来控制的,通过在飞行器上安装拍摄的装置可以用来拍摄一些高空画面。
随着科技的发展,四旋翼无人飞行器技术也获得了很大的进步。四旋翼无人飞行器可以运用在各种场合,不仅仅是在军事上,在生产、生活中也有它的用武之地。在军事方面,可以用来侦查探测未知地形,跟踪采集导弹数据,中继通信系统等。在生活方面,可以用来拍摄现场情况,高空摄影,传达数据指令等等。运用四轴飞行器来实现上面所讲的功能,既可以降低成本,又保证了灵活性,同时也避免了人手不足的问题[1]。
与此同时,人们对四旋翼无人飞行器的要求也越来越高。因为四旋翼无人飞行器在各个方面,各个领域的大范围普及,一些常见的问题要求也随之而来。例如能否及时接收到控制器发出的指令,能否按照要求准确快速的调整速度,以及遇到紧急事件时自我调整能力等[2]。一个可靠的控制系统直接决定了一个四旋翼无人飞行器的好坏,因此人们一直致力于开发一个性能良好、能稳健运行的内部控制系统。常见的就是用PID控制器来控制调节。PID控制器是一种线性控制器,它利用输入与实际两者之差作为输入量,避免出现较大误差,可以方便进行调节[3,4]。
1.2 课题背景及研究目的和意义
传统飞行器包括一个主转和一个尾浆。它通过控制舵机来改变螺旋桨的桨距角,从而达到控制飞行器的位置和速度的目的。四旋翼飞行器则和传统的机器完全不一样,它通过微控制器实现对四个电机的单独调速,根据地面控制中心指令及电子陀螺仪当前的姿态信息能动态调速,保持飞机的平稳飞行及控制指令的有效性[5]。四旋翼飞行器是通过改变机翼旋转的速度来控制升降,这样会存在很多不稳定的情况,因此就需要一种能够长期确保稳定的控制方法。四旋翼飞行器是一款可以自由垂直起降,灵活度很高的飞行器,因此非常适宜在静态和准静态条件下飞行。人们在对四轴飞行器进行研习时需要用到更多的高端理论技术,比如:空气动力学,传感技术等等[6]。如今,由于传感器和计算机技术迅猛发展,四轴飞行器在钻研平台方面起了很重要的作用,方便以上领域的研究。所以,在科技探讨和结合实际方面,四轴飞行器技术都扮演这很重要的角色。
1.3 国内外的研究现状
1.3.1 国外研究现状
外国相比于中国,对于四轴飞行器的研究比较早。国外的研究人员致力于微小型四轴飞行器的自主飞行和多方面协调编队等的研究,完成微小型四轴飞行器的自主飞行的方法体现在以下3个方面:飞行器自主飞行的系统方法,根据视觉系的自我飞行调节,依据物理惯性导航的自我飞行调节[7]。其中比较注明的系统即使美国乔治亚理工大学的GTMARS系统,美国宾夕法尼亚大学的HMX-4系统都在这方面也取得了比较大的成就。另外,针对后者,美国斯坦福大学的Mesicopter项目做出了巨大贡献。为了避免飞行器互相碰撞和遭遇障碍,进行了一个新的分布式控制算法。该算法基于修正的虚拟“长机——僚机”结构。系统运用人工势场法,避免飞行器之间互相碰撞,保证飞行器编队在遇到障碍中能够躲避障碍飞行。通过引入回转力方法,使得飞行器躲避障碍动的行动更加合理,同时解决了纯人工势场法中固有的局部极小点问题。
1.3.2 国内研究现状
随着科技的迅速发展,国内大部分高校也开始探索飞行器。其中比较出名的例如北京理工大学的智能机器人研究所,上海交通大学的微纳米科学技术研究院等等,均取得了不错的成效。
在对旋翼式四轴飞行器有了初步的认识之后,一些著名的大学开始创造出有自己风格的四轴飞行器。国防科技大学对旋翼式四轴飞行器研究起步不是很早,但后来居上成功实现了对四轴飞行器的设计和制造[8]。截至目前,飞行器控制系统硬件组成已经通过检测,下一步的任务就是对软件进行深入的开发研究。上海交通大学在该领域的探索则集中在非线性控制,机器视觉和紧耦合智能辨识建模等,从事该研究的专家拥有着丰富的成功经验,基于这些财富,他们开始进行能负载的摸索,实现飞行器的离地飞行。
1.4 本文所做的工作
本论文主要研究的是无刷无感直流电机调速功能的实现,论文先是陈述了课题的背景和研究的目的和意义,接着介绍了本文所用芯片的各个模块的作用,然后研究了无刷无感直流电机的工作原理和PID控制算法如何使用,在此基础上,软件设计了控制系统。
相关图片展示:



课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


