ABB机械手臂自主抓物与搬运实现毕业论文
2020-05-24 12:16:29
摘 要
随着科技的不断发展,社会产品需求不断增大,因此工业流水线的生产效率急需提高,而自动化产品的出现满足了这一要求,既节省了人力,又提高了产品生产效率。本论文设计实现了基于ABB机械手臂的生产线工作站,对实际工作中可能出现的问题可以快速仿真编程解决。硬件部分主要有:ABB机械臂、控制柜、FlexPendant几个重要部分组成。主要通过Robotstudio完成机械臂搬运工作站的模拟仿真,工作站主要由1台机械臂、2条传送连和2个垛盘构成。其次使用smart组件实现传送链上物体运动和物体可以跟随夹具一起运动。另外详细介绍了IRC5控制系统,仿真中也给出了机械臂运动的程序,并且考虑了物体的叠放以及搬运的安全高度等因素。
关键词:ABB机械手臂 IRC5系统 Robotstudio 工作站
Abstract
With the continuous development of science and technology, the social product demand is increasing, so it urgently needs to improve the production efficiency of the industrial assembly line, and the emergence of automation products meets the requirements, saves the manpower, and improve the production efficiency. This paper designs the production line workstation based on ABB robotic arm. Some problems in the actual work can be solved in simulation programming. Hardware part mainly includes: ABB robotic arm, control cabinet, FlexPendant and other several important parts. We mainly complete mechanical arm handling simulation workstation through Robotstudio. The workstation is mainly composed of one arm, two transmission chains and two crib sets. Secondly, by using the smart component, we can move object on the transmission chain and let object move with arm. Other ways,IRC5 control system is introduced in detail. We give the mechanical arm movement process, and consider the safety of objects stacked and handling height and other factors.
keywords: ABB robotic arm; IRC5 control system; Robotstudio;workstation
目 录
摘 要 I
第一章 绪论 1
1.1课题研究意义 1
1.2国内外发展历史 1
1.3机械臂发展趋势 2
1.4论文内容与结构安排 2
1.5本章总结 3
第二章 机械臂硬件系统 4
2.1 机械臂系统的完整组成 4
2.2 控制柜的组成与功能 5
2.3 ABB电机 6
2.4 IRC5 系统 6
2.5 示教器 7
第三章 机械臂数学模型建立 9
3.1概述 9
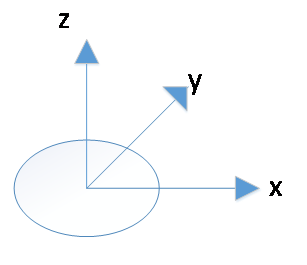
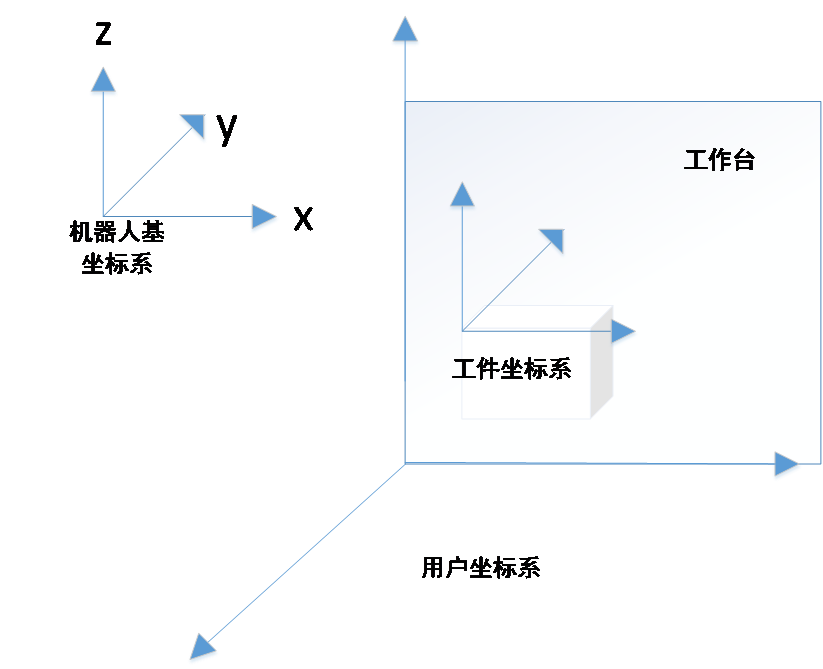
3.2 机器人坐标系统 9
3.3位姿描述 11
3.3.1位置描述 11
3.3.2方位描述 11
3.3.3位姿的描述 12
3.3.4坐标变换 12
3.4机器人运动学方程建立 14
第四章 RobotStudio仿真软件 17
4.1认识仿真软件及建立工作站 17
4.2构建基本仿真工业机器人工作站 17
4.2.1导入机械臂 17
4.2.2添加并建立工具 18
4.2.3运动路径的仿真 18
4.3 SMART组件的使用与案例 20
4.4本章小结 21
第五章 ABB机械臂自主抓物与搬运仿真试验 22
5.1概述 22
5.2 三个重要数据创建 22
5.2.1 创建工具数据 22
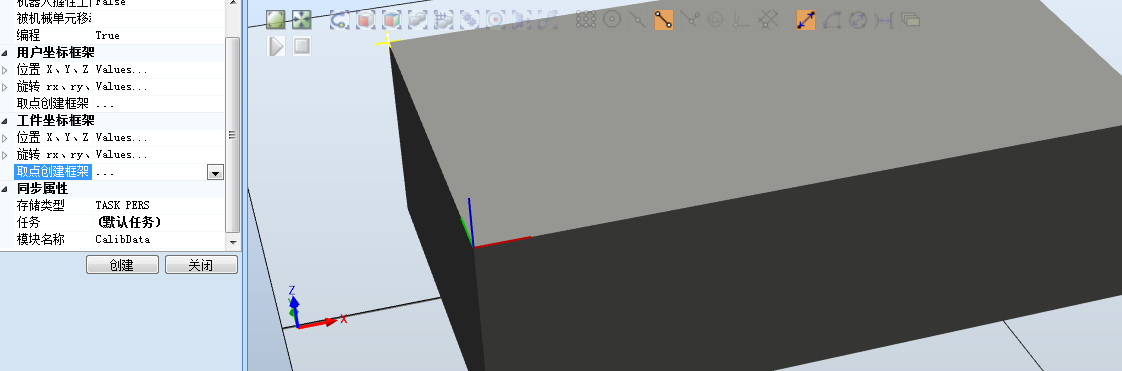
5.2.2工件坐标数据创建 23
5.2.3有效载荷数据创建 24
5.3 I/O口配置 24
5.4 搬运编程解析 26
5.3.1几个重要指令讲解 26
5.5机械臂运动流程 28
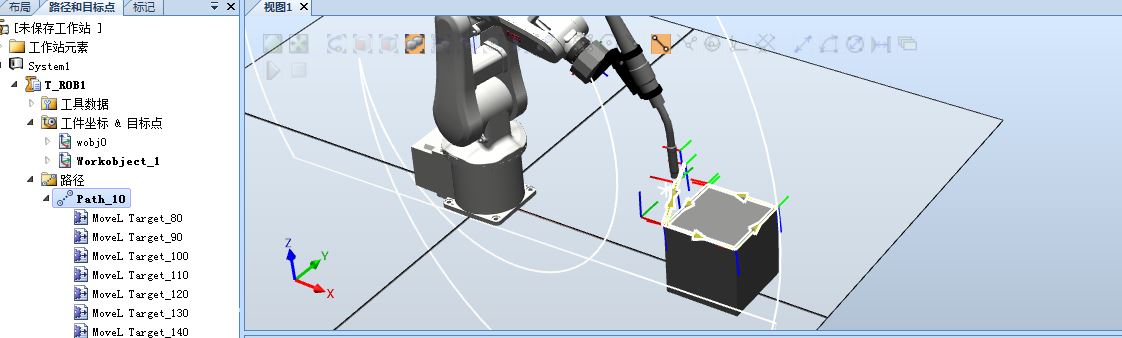
5.6仿真结果展示 29
5.7总结 30
第六章 总结展望 31
6.1 总结 31
6.2 展望 31
参考文献 32
致谢 34
第一章 绪论
1.1课题研究意义
在近代工业生产过程中,自动化成为了首要目标。不过生产线上,加工和装配等工作还需要依靠人力,费时间也费力气并且效率跟机器人没法比[1]。同时人的劳动强度特别大,不小心还会对人本身造成身体上的伤害。对比来看,这严重限制了整个生产过程的效率。所以我们应用机械臂,它失误率比人低,并且能减少了事故发生。
在现代工业中,使用机械臂还有如下几点意义[2]:
能够提高自动化程度,导致生产率的迅速提高,降低生产成本,最终达到实现工业生产机电自动化的目的;能够改善劳动环境、减少事故发生。在恶劣环境中,人可能无法进行工作,但是机械臂作为机械却没有这些问题;能够减少人力劳作,有利于高效率生产。
1.2国内外发展历史
械臂发展至今,经历了三个层次的发展:
第一代就是示教-再现机械臂。它没有感知功能,能够反复编写程序,它基本只能在固定的环境完成既定的任务。它的重大缺陷是:不能在生产时改进产品质量,运用领域受限,精度较低。
第二代就是反馈机械臂。它有一整套用来探索周围环境的传感器,能够通过触觉、视觉等感知形式完成对外部环境的探测,用探测到的信息对机械臂进行反馈控制。这类机械臂能够对自身进行调整,因此可以在作业中改善产品质量。
第三代就是智能机械臂。这类机械臂可以适应的环境广,能自主对指令做出某些判断。它具备不同传感器,能够做出复杂的逻辑推理、判断和决策。可以在工作环境中单独运动,具有发现问题并自主解决问题的能力。
1.3机械臂发展趋势
今后机械臂的发展,有如下几个发展方向[4]:
- 重复高精度:精度是指机械臂到达目标点的准确度,而重复精度意思是重复同一动作,机械臂做出同样动作的准确度。所以,重复精度需要更多的考虑;
- 开放型、模块化控制系统:友好的人机界面,更多的语言、图形编程界面。未来的工作在于统一标准,通过互联网加强交流,确保离线编写的程序可以用于真实环境。
- 不给油化:在食品生产、医药、生物等行业里需要做到没有污染的要求,所以不给油是很重要的一点。
- 机电一体化:发展一体化需要研发与机电技术有关的反馈器件,使 “开关控制”提高到“反馈控制”,改善了系统的稳定性。
1.4论文内容与结构安排
本课题主要是参照工厂生产线上搬运机械臂工作站,结合实验室现有ABB机器人,完成基于ABB机械臂的自主搬运系统的构建与实验,文章的具体结构安排如下:
相关图片展示:



课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


