纯电动汽车自动泊车系统设计毕业论文
2020-02-19 07:51:49
摘 要
经过一个多世纪的发展,以汽车为首的交通运输系统正面临着一场科技革命,一场以实现互联互通的智能交通和提高现有交通效率的交通系统革命正在酝酿。作为减少驾驶员的操作负担和提高驾驶安全性的智能辅助驾驶系统近些年发展迅速,一方面是得益于电子信息技术和计算机传感技术的高速发展,另一方面则是实实在在的现实需求。自动泊车是智能辅助驾驶系统中的一个方面,研究自动泊车系统,不仅是现实需要更是未来汽车科技发展的大势所趋,因此设计一种可普及的自动泊车系统具有非常重要的意义。本文致力于研究自动平行泊车系统的实现方法和部分原理的剖析,并最终通过MATLAB仿真验证了该方法可以实现自动平行泊车。
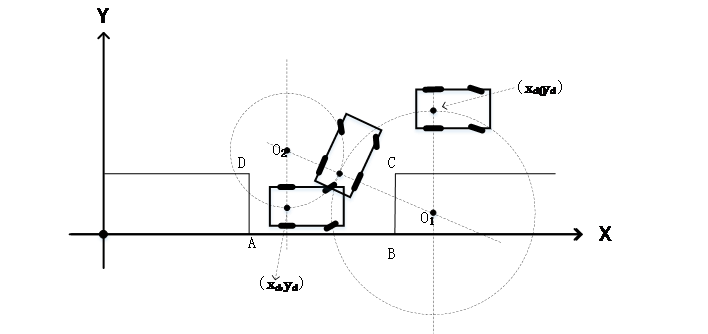
本文首先基于车辆运动学模型建立汽车泊车的运动模型,并综合考虑车辆运动过程中的非线性完整性约束问题,通过研究车辆后轴中心点的运动轨迹,同时参考泊车轨迹规划的两段相切圆弧法,再分别最短路径以及最短路径的曲率连续化方面对泊车路径进行优化,最后在MATLAB中建立相应模型使用GUI进行仿真展示。最后总结在设计过程中发现的问题和一些改进想法。
关键词:自动平行泊车 不等半径泊车 MATLAB仿真
Abstract
After more than a century of development, the transportation system headed by automobiles is facing a technological revolution, and a revolution of transportation system is brewing to realize the interconnection of intelligent transportation and improve the existing traffic efficiency. As a way to reduce the driver's operating burden and improve driving safety, intelligent driving assistant system has developed rapidly in recent years. On the one hand, it benefits from the rapid development of electronic information technology and computer sensing technology, on the other hand, it is a real demand. Automatic parking is one aspect of intelligent assistant driving system. The research of automatic parking system is not only a realistic need, but also a trend of future automobile science and technology development. Therefore, it is very important to design a universal automatic parking system. This paper is devoted to the study of the implementation method and the analysis of some principles of the automatic parallel parking system. Finally, the simulation of MATLAB shows that this method can achieve automatic parallel parking.
This paper first establishes the parking motion model based on the vehicle kinematics model, and considers the non-linear integrity constraints in the process of vehicle motion. By studying the locus of the center point of the vehicle rear axle, and referring to the two-section tangent arc method of parking trajectory planning, the parking paths are optimized by curvature continuation of the shortest path and the shortest path respectively. Finally, the corresponding model is built in MATLAB and simulated by GUI. Finally, the problems found in the design process and some improvement ideas are summarized.
Key words: Automatic parallel parking; Unequal radius parking; MATLAB simulation
目录
第1章 绪论 1
1.1研究背景及意义 1
1.2 自动泊车系统的组成 2
1.3 国内外的研究现状及应用 2
1.3.1 国外研究现状 2
1.3.2 国内的研究现状 3
1.3.3 自动泊车的应用现状 4
1.3.4 本论文主要工作内容及结构 6
第2章 自动泊车系统分析 7
2.1 引言 7
2.2 泊车位检测 7
2.2.1 超声波传感器 7
2.2.2 摄像头图像识别法 7
2.2.3 激光雷达测量法 8
2.3 纯电动汽车运动学模型 8
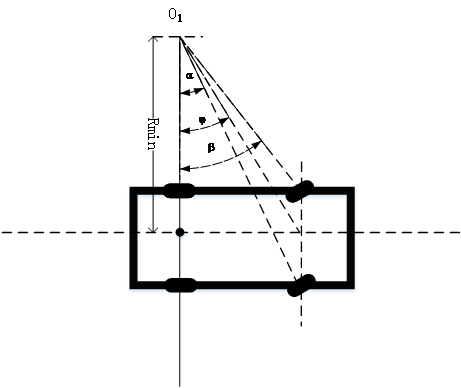
2.3.1 汽车Ackerman转向原理 8
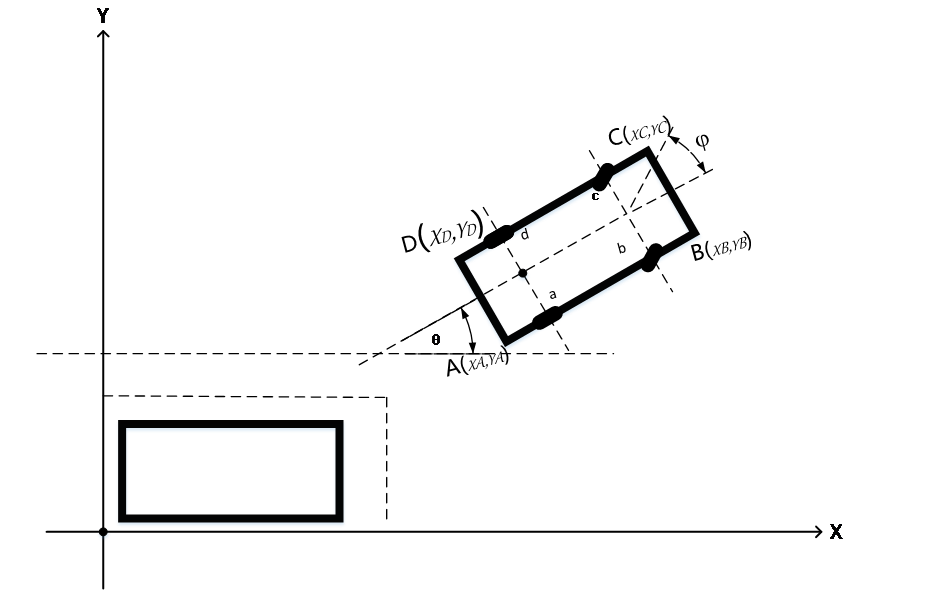
2.3.2 泊车时车辆参考点选择和车速分析 9
2.3.3 车辆的简化运动模型 10
2.4 纯电动汽车自动泊车轨迹规划 12
2.4.1 泊车轨迹规划的两段圆弧法 12
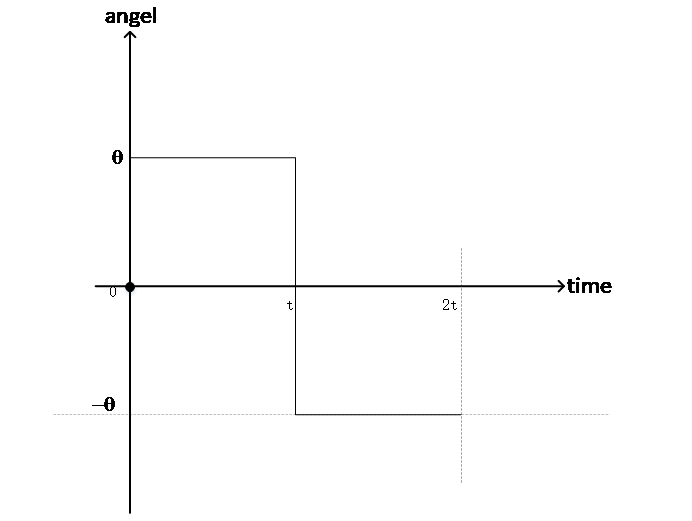
2.4.2 泊车轨迹两段圆弧的曲率处理 14
2.5 MATLAB GUI仿真 15
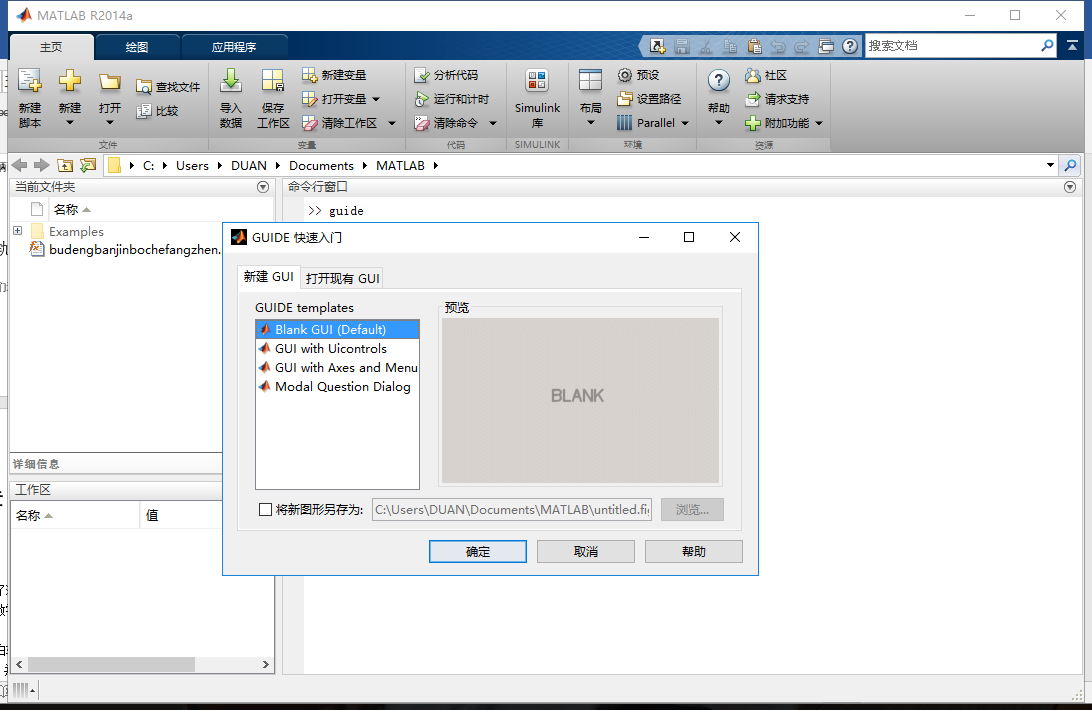
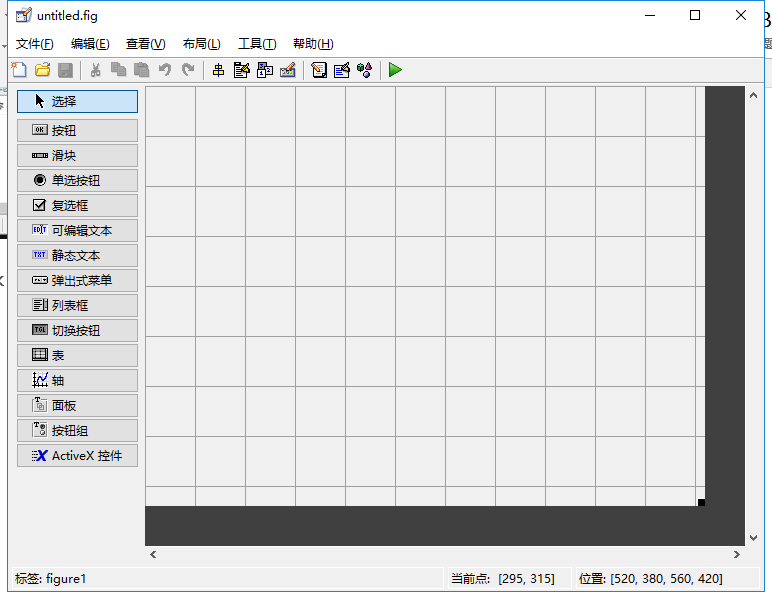
2.5.1 MATLAB GUI简介 15
2.5.2 MATLAB GUI使用 15
第3章 车辆自动泊车过程分析与仿真 19
3.1 引言 19
3.2 基于两段圆弧的改进型泊车 26
3.2.1 对最终停车处的改进 26
3.2.2 对中间停车处的改进 27
3.2.3 对起始和终点处的改进 32
第4章 总结与展望 33
参考文献 34
致 谢 36
第1章 绪论
1.1研究背景及意义
新世纪以来,随着我国经济稳步增长,人民的生活水平逐步提高,汽车也从奢侈品慢慢地走进了千家万户,中国也随之成为了一个汽车的生产和销售大国。据中国汽车工业协会统计,2018年我国汽车累计产销2780.92万辆和2808.06万辆,其中乘用车产销2352.94万辆和2370.98万辆;商用车产销427.98万辆和437.08万辆。目前中国汽车保有量已超过四亿,由此可见,中国的汽车市场目前来说还是一个非常巨大的市场。与此同时,与汽车相关的生产制造和研发设计,尤其是最近几年火热的自动驾驶和纯电动汽车,都在蓬勃发展。
但是,随着我国机动车产销量保有量的迅速增加,与之配套的相关交通基础设施还很不完善,尤其是大城市里常出现的堵车和停车难现象。据调查,我国22%的汽车交通事故是由泊车引起的。在狭窄的空间内安全平行泊车并不是一件容易的事。在倒车过程中,驾驶员只能依靠倒车镜和倒车雷达来观察汽车周边情况,无法完全了解汽车的环境情况。并且,上述辅助泊车工具所观测的环境情况是有限的,在倒车过程中,驾驶员不仅需要控制离合、转向、刹车、油门,同时还要时不时分心检查车后方以及车身两侧的情况。由此可见,泊车过程是一个较为复杂的过程,需要驾驶员专心精确控制车辆。如果在路边泊车出现事故,在造成经济损失的同时,还会导致交通堵塞,严重者还会造成连环车祸带来巨大的经济损失和恶劣的社会影响。因此,安全性问题是驾驶员在泊车过程中相当重要的一个问题。
但是石油的不可再生性和每年巨大的消耗量,这将导致以石油为动力来源的燃油车的发展必将受到限制。而最近几年,以特斯拉为代表的纯电动汽车正表现出巨大的发展潜力。据中国汽车工业协会提供,2018年,我国新能源汽车累计产销127.05万辆和125.62万辆,同比增长59.92%和61.74%。其中纯电动汽车产销98.56万辆和98.37万辆,同比增长47.85%和50.83%。而与之形成鲜明对比的是燃油车的销量停滞不前,并且在国家的补贴和各种优惠政策支持之下,以蔚来、小鹏和威马为首的纯电动车企发展势头正盛,目前产销量正稳步增长。
众所周知,燃油车工作时会产生严重的电磁干扰,在泊车时会对传感器的灵敏度和准确度产生不可避免的影响。但是在纯电动汽车下就不会有这样的问题,我们就可以准确地检测车辆行驶过程中的各项参数以及周围环境,再结合目前纯电动车汽车迅猛的发展势头,纯电动汽车的自动泊车必将会有巨大的应用前景。
与此同时,在纯电动汽车中实现自动泊车比在燃油车上实现有着相当大的优势,首先就是纯电动汽车多采用永磁异步电机或者交流感应电机,在动力控制方面比原有的燃油机更加精准和快速,可以实现更加精准的速度控制和转向控制。同时也得益于近几年传感器技术和单片机技术的发展,纯电动汽车可以实现对周围环境的准确感知和快速处理,使得汽车的“脑子”更灵活、“眼睛”更明亮,也使得自动泊车技术可以做到更加成熟和可靠了。
1.2 自动泊车系统的组成
自动泊车系统主要由传感器感测系统、中央控制系统、执行系统等组成。传感器感测系统主要通过超声波或摄像头感知车辆周围的环境信息数据,在停车场内寻找空闲车位并实时反馈车辆的位置和停车场中其他已用车位的位置信息,生成停车场环境信息数据库;控制系统主要负责处理传感系统采集到的车辆位置信息、停车场可用车位的位置信息和生成自动泊车策略,实时监控车辆的当前位置及空闲车位位置,对生成的自动泊车策略进行调整;执行系统依据控制系统生成的控制策略,实时控制车辆的动力系统、转向系统和刹车系统,严格按照控制系统发出的控制指令控制车辆行驶至预定位置。
实际生活中的泊车主要有两种形式,一种是常见的倒车入库,即垂直泊车;另一种是路边停车,也称为平行泊车(顺列式泊车)。在生活中垂直泊车时比较容易操作的一种泊车形式,现在马路两边的一些停车场也有采用斜向泊车的车位。本文主要研究的是平行泊车系统。
1.3 国内外的研究现状及应用
1.3.1 国外研究现状
自动泊车的研究程度与汽车电子技术的发达程度有着密切的联系,在汽车电子技术较为发达的德国、日本、美国等国家,自动泊车的路径规划和跟踪控制等研究也做得相当成熟和透彻。早在1989年,斯坦福大学的Derrick Nguyen和Bernard Widrow教授首次发表了基于神经网络的半挂车自动泊车研究成果,两位学者针对半挂车泊车过程中方向、速度和倒车时机难以把握的问题,对半挂车进行数学建模,并结合神经网络算法实现了半挂车自动泊车[1]。
1994 年, Laumont 等人通过计算两条路径的方法第一次实现了自动平行泊车,同时也对平行泊车场景中车辆的跟踪控制算法进行了研究,但是该方法受倒车初始位置和避撞约束条件的影响较大,且耗时较长[2]。
1999 年,英国K.Jiang、L. D. Seneviratne 等人将平行自动泊车过程分为检测、定位、调整三个阶段,在碰撞约束条件下规划泊车路径,采用圆弧和若干直线相接,可以在车位和汽车尺寸已知的情况下直接倒车,并且路径是唯一的[3]。此外还研究了速度因素、横纵向运动、狭小空间汽车转角限制等不确定因素给泊车带来的影响,该实验通过搭载泊车系统机器人验证了方案的可行性。之后,传感器和芯片的巨大进步带领自动泊车研究进入了新的高度。自动泊车的场景研究从简单的平行式泊车场景向斜列式、垂直式泊车场景演变,应用的算法也逐渐涉及遗传算法、模糊控制理论、蚁群算法、神经网络算法等多种复杂算法。
2001年,西班牙学者F.Gomez.Bravo,F.Cuesta等人对平行泊车和斜列式泊车进行研究,在分析车辆泊车场景的各种数据的基础上,通过运用模糊控制理论规划出一条最优泊车路径,并结合一种实时避障算法实现自动泊车[4]。ChianSong Chiu等人在以上基础上,将驾驶员泊车经验与事变模糊控制原理相结合,实现了较好的轨迹跟踪控制效果,但是控制器的算法比较复杂用时较长实际应用时不太可靠[5]。
2009年,加拿大的K.Demirli和M.Khoshnejad等学者研究了泊车位未知的自动泊车控制系统,通过模糊神经网络与多项式曲线对车辆进行控制与追踪,该方法有一定的创新性但是由于其需要对泊车初始位置与泊车轨迹进行大量的运算,导致运算量过于庞大,耗时较长[6]。之后有学者对控制算法和轨迹生成算法进行了大量的研究,有些取得了很好的效果。Mohamed Hanafy等学者在2011年提出使用蚁群算法来替代模糊控制器中隶属度函数迭代学习的性能,并且在实际测试中取得了不错的效果[7]。
1.3.2 国内的研究现状
国内对自动泊车技术研究起步较晚,21世纪逐渐有学者开始了对自动泊车过程中轨迹的跟踪控制器进行研究,也取得了相当不错的成果,对自动泊车的研究水平逐步跟上国际步伐。
2001年,清华大学的于伟等人采用模糊控制方法[9],针对倒车过程中所涉及到的复杂环境进行了详细分析,建立相关数学模型,采用遗传算法对控制器输入输出量进行参数优化,缩短了倒车轨迹和倒车时间,但是该方法产生的轨迹存在“死区”,有一定的不足。
2005年,北京师范大学的杨昔阳等人采用变域论模糊控制器[11],该控制器的参数能随着产生的误差进行调整,提高了控制器的灵活性和适应性。将该方案同普通模糊控制仿真比较,比普通模糊控制表现出了更好的适应性和控制准确度。
2007年,吉林大学的李占江等人对遗传算法和模糊控制理论进行研究[13],在人类驾驶员泊车数据的基础上分别对自动平行泊车、自动垂直泊车、自动斜式泊车设计了模糊控制器,此外为降低模糊控制器的复杂度,该方法还对整个泊车过程做了阶段性分割,并分别建立了具有针对性的控制器,为多阶段泊车方法提供了思路。
2010年,姜辉等人采用连续函数反正切曲线逼近原倒车轨迹[14],解决了因跟踪原来倒车轨迹产生的转向盘转角突变、方向盘角度变换过快的问题,并解决了自适应神经网络如何获取平行泊车模糊控制逻辑的瓶颈问题。
2014年,湖南大学的黄迅和周培义等人采用回旋曲线连接直线段和圆弧段构建了一条光滑的泊车路径[15],并且还研究了泊车位的图像识别处理,最后在小车上实现了自动识别泊车位和自动泊车,效果基本满足要求。
综上所述,国内外对于自动泊车的研究基本上可分为两大方向[16],一个是智能控制车辆速度和方向盘实现自动泊车,另一个是路径规划和路径跟踪实现自动泊车。智能控制实现自动泊车主要是依据人类泊车行为设计车辆的中央控制系统实时检测车辆周围环境和控制车辆运动。主要依据深度学习和大数据对泊车系统进行训练实现车辆的自动泊车,这一方向近几年有了巨大的进步。而另一方向在过去的研究中尝试了多种细分方法,目前已经有了很好的自动泊车方案,并且相比于智能控制,路径规划控制过程简单,方案容易优化升级。
1.3.3 自动泊车的应用现状
随着科技的发展和对自动泊车的研究越来越深入,有很多组织做出了能够实现自动泊车的原型车,也有很多公司推出了质量可靠可量产的自动泊车系统。在近几年纯电动汽车的强势出击之下,纯电动汽车基本都会将自动泊车作为标配功能,也有些车型将自动驾驶当成了一大卖点,自动泊车系统目前基本已经到了应用推广这一阶段。驾驶人员只需要在需要停车时启动自动泊车系统就可以完全将剩下的完全交给车辆控制系统,目前也已经有许多汽车实现了自动泊车功能。
2009年9月,Goole公司宣布进入智能汽车领域并开始了Goole无人驾驶汽车的研发,其无人车造型如图所示。该无人车装有超声波雷达、红外摄像头、激光雷达、摄像头GPS/INS系统等,可以实现障碍物规避、车道保持、行人检测、自动泊车、交通标示识别和车辆定位等功能。从Goole在2018年公布的测试报告可以得到,其无人驾驶汽车行驶1000英里需要人类干预的次数降至0.18次,并且其累计测试行驶里程已经超过了400万英里。从Goole当前的发展形势来看,Goole无人车早已突破了自动驾驶的相关技术壁垒,目前Goole需要解决的可能是无人驾驶技术的普及和推广了。
|
|
图 1.1 Goole无人车 | |


2012年特斯拉公司CEO埃隆.马斯克发布了具有划时代意义的特斯拉Modle S,这是特斯拉公司发售的第二款车型,也是奠定公司发展基础的一款力作。在此之后,特斯拉打出了名气,也带领自动驾驶走上了一个新高度。目前,特斯拉汽车基本都实现了自动泊车和部分辅助驾驶功能,也由于其绿色环保的纯电动理念和高科技属性吸引了一大批粉丝。特斯拉曾发布的一份安全报告中指出,其搭载的Autopilot辅助驾驶系统做到了每3434万英里才会遇到一次事故,而在没有搭载自动驾驶的其他品牌汽车平均每192万英里就会发生一起事故,。如下图1.2所示是特斯拉最高端的Modle X电动汽车。埃隆.马斯克曾表示其旗下的特斯拉汽车硬件上具备实现全自动驾驶的能力,并且公司预计2019年底将实现全自动驾驶,但是相关的政策法规还不完善,真正的全自动驾驶汽车何时能上路还需要时间的验证。
|
图 1.2 特斯拉Moodle X |

1.3.4 本论文主要工作内容及结构
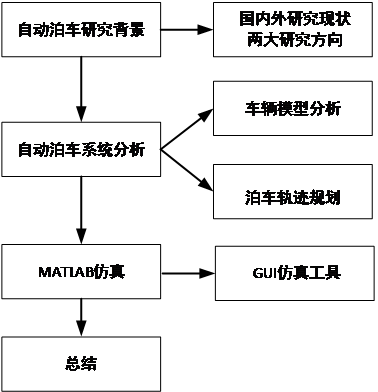
本论文首先阐述了自动泊车的研究背景,介绍了国内外对车辆自动泊车问题研究现状;之后针对车辆自动泊车问题,通过分析车辆的数学模型和建立车辆的运动学模型,然后分析泊车过程,逐步对泊车路径进行规划和改进;最后采用MATLAB对车辆平行泊车过程进行仿真研究。本论文的总体结构如图1-3所示,
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


