钛合金铸件加工打磨一体机的设计毕业论文
2021-03-11 23:24:17
摘 要
针对现阶段钛合金铸件中介机匣人工打磨的劣势,本文提出了采用工业机器人配合旋转工作台的方法来实现工件的各个不同部位的加工打磨。根据工件的加工要求设计了相关的打磨工艺,并选型了刀具,刀柄,电主轴,机器人,旋转工作台等所需的设备,然后设计了自动换刀装置来实现打磨过程中的自动换刀,并且还有单臂吊,定位夹紧装置等来方便工件的定位夹紧,还有底座,防护罩等来保证安全性,使所有装置形成一个较完整的加工中心,采用robotstudio程序控制机器人的加工轨迹,PLC程序控制自动换刀过程,使整个系统形成一个自动化的整体。由此我们可以大大降低工人的劳动强度,提高生产效率,保证产品质量的一致性和稳定性,降低生产成本。
关键词:工业机器人;钛合金;旋转工作台;自动换刀;打磨
Abstract
In view of the disadvantage of the artificial grinding of the intermediate case of titanium alloy casting at present, a method of using industrial robot and rotating table is put forward to realize the grinding and processing of different parts of the workpiece. According to the processing requirements of the grinding process related to the design and selection of cutting tool, tool shank, electric spindle, robot, rotary table and other necessary equipment, and then design the automatic tool changing device to realize the automatic tool change during the grinding process, and there is a single arm crane, positioning and clamping device to facilitate positioning and clamping. The protective cover and the base, to ensure safety, so that all devices formed a relatively complete machining center, machining by using the robotstudio program to control the robot, PLC program control automatic tool changing process, the whole of the entire system to form an automated. As a result, we can greatly reduce the labor intensity of workers, improve production efficiency, ensure consistency and stability of product quality, and reduce production costs.
Key words: Industrial robot;Titanium alloy;Rotary tables;Automatic tool change;Grinding
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 国内外研究现状 1
1.3 研究的目的和意义 4
1.4基本内容以及目的 5
1.5 拟采用的技术方案及措施 5
第2章 打磨工艺及主轴刀具机器人的选型 7
2.1 打磨的工件及打磨部位的介绍 7
2.2 刀具的选型 10
2.2.1 刀头材料的选择 10
2.2.2 刀柄的选择 11
2.3 打磨的工艺 12
2.4 电主轴的选型 13
2.5 机器人的选型 14
第3章 机械系统的设计及选型 16
3.1 自动换刀系统刀库设计 16
3.2旋转工作台选型 18
3.3 定位夹紧装置设计 19
3.4 单臂吊的设计 21
3.5 底座设计 22
3.6外围护罩设计 24
3.7 整体的布局 25
第4章 控制及仿真 27
4.1 robotstudio控制仿真过程 27
4.1.1 robotstudio简介 27
4.1.2 软件仿真过程介绍 27
4.2 PLC控制的刀库自动换刀 31
第5章 总结与展望 33
参考文献 34
致谢 36
附录 37
第1章 绪论
1.1 研究背景
当前,铸造行业中铸件的清理打磨仍然使用大量的人工,而人工成本的不断上涨加重了铸造企业的负担,同时粉尘飞扬的打磨环境对工人身体健康造成极大危害,职业病预防、工伤赔偿进一步提高了人工成本,作业环境差、劳动强度大也使企业陷入了招工难的困境。另外,大型铸件使用人工打磨,需要大量的场地,效率低下,打磨质量不能保证,这些都无形中增加了企业的生产成本。特别是航空方面所使用的一些钛合金铸件的打磨,这类材料较难加工,人工打磨的方式不能保证其加工质量以及加工效率,并且环境和安全性问题也较大。
20 世纪 60 年代是工业机器人的诞生年代,它于美国诞生,得到迅速发展是在20 世纪 90 年代,并且美国使机器人技术最先产业化。工业机器人有着无与伦比的活力,自诞生以来经过几十年的发展,它已经成为衡量科技水平与工业制造水平的重要标志。已经在机械加工、电工电子、汽车生产制造等行业广泛应用,在铸造行业打磨采用工业机器人相对较晚,但是在工业水平持续发展的推动下,越来越多的企业重视并推行“绿色铸造”,显示出了工业机器人在铸件打磨方面的需求[8]。
因此本文提出钛合金铸件加工打磨一体机的设计,意义在于改善国内的打磨加工现状,提高加工效率和质量。
1.2 国内外研究现状
本打磨系统主要由工业机器人,旋转工作台,自动换刀系统,定位夹紧装置等组成。
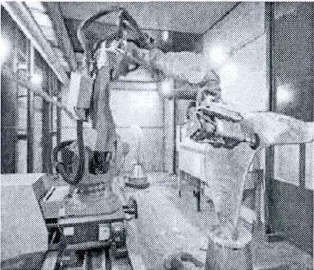
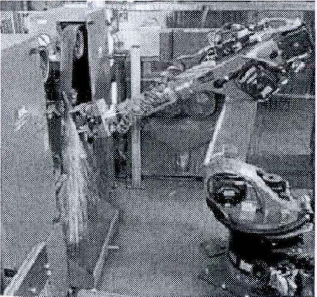
国外对机器人应用于打磨的研究有很多,如Fusaomi Nagata(日本)开发了一个自动打磨系统,它进行的加工实验的工件是塑料瓶注塑模具,并开发了一套机器人打磨抛光系统,该系统是以CAD/CAM的力/位混合控制为基础的。西班牙马德里科技大学自主研制了一套抛光系统,该系统是基于六自由度机器人,并利用它对机器人打磨抛光的过程进行了较为完整建模研究。ABB公司的机器人市场应用最为广泛,应用于磨削、抛光、精整、割据、机械加工、喷丸处理等机器人集成应用[20]等。国内将机器人应用于打磨上的实例不是非常多,安徽埃夫特智能装备有限公司研究设计了一台柔性打磨机器人(Efort打磨机器人),适用于卫浴行业,代替人工打磨,填补了国内打磨抛光机器人的空白[21];以PUMA-562机器人为平台,华中科技大学研究开发了机器人抛光实验系统;吉林工业大学对机器人超声弹性抛光进行了深入研究,因此机器人的应用无论是国内还是国外在打磨方面的研究越来越多,其应用也越来越多[20],如图1.1至图1.4所示。所以将工业机器人应用于铸件打磨行业是很重要的发展。
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


