牵引网低次谐波抑制的自抗扰控制算法研究毕业论文
2020-03-23 09:31:05
摘 要
由于我国越来越多的越来越多的动车组和电力机车投入运营,导致电气铁路供电系统的低频振荡现象出现新的问题。只有有效的解决电气化铁路的低频振荡现象才能使我国电气铁路网更加安全稳定的运行。自抗扰控制技术是由韩京清教授基于经典的PID控制技术提出的新型控制技术。
本文对牵引网进行模型的建立,对牵引网的低频振荡进行分析和研究,然后对自抗扰控制技术进行学习和研究。本文提出了对牵引网的低频振荡的自抗扰控制方法,对牵引网低频振荡的PI控制进行研究和比较。通过查阅学习大量资料,初步理解和学习自抗扰控制技术,并尝试运用于牵引网的低频振荡的抑制。
仿真是采用MATLAB/simulink搭建牵引网低频振荡抑制的PI控制模型和自抗扰控制模型,并对模型进行仿真和分析。通过分析对两种控制技术的低频振荡能力进行比较。
关键字: 牵引网低频振荡; PI控制;PID控制;主动阻尼控制; 自抗扰控制
Abstract
As more and more EMU and electric locomotive are put into operation in our country, there are new problems in the low-frequency oscillation of Electric railway power supply system. Only by effectively solving the low-frequency oscillation of electrified railways can the electric railway network of China be more safe and stable operation. Self-disturbance rejection control technology is a new control technology proposed by Professor Han Jingqing based on classical PID control technology.
In this paper, the model of traction Network is established, the low frequency oscillation of traction network is analyzed and studied, and then the self disturbance rejection control technique is studied. In this paper, the self disturbance rejection control method for low frequency oscillation of traction network is presented, and the Pi control of low frequency oscillation in traction network is studied and compared. Through the study of a large amount of data, the preliminary understanding and learning of auto disturbance rejection control technology, and try to apply to the traction network of low frequency oscillation suppression.
The simulation is a PI control model and an auto disturbance rejection control model using Matlab/simulink to build the low frequency oscillation suppression of traction network, and simulate and analyze the model. The Low-frequency oscillation capability of the two control techniques is compared by analysis.
Keywords: low frequency oscillation of traction network; Pi control; PID control; active Damping control;self-disturbance rejection control
目录
第1章 绪论 1
1.1 研究背景及意义 1
1.2研究现状 1
1.3本文主要研究内容 1
第2章 牵引网低频振荡 3
2.1牵引网电力谐波的产生 3
2.2低频振荡的机理 3
2.3牵引网低频振荡分析方法 4
2.4牵引网中低频振荡的抑制方法 5
2.5 PI控制的原理 6
2.6 PID控制技术 7
2.7 PID控制技术缺陷的改进 8
2.8自抗扰控制器 10
2.9本章小结 12
第三章 系统模型建立 13
3.1牵引网模型建立 13
3.2加入主动阻尼补偿控制 15
3.3自抗扰控制仿真模型的建立 17
3.4 本章小结 18
第4章 仿真 19
4.1 仿真及分析 19
4.2 本章小结 20
总结与展望 21
参考文献 22
致谢 24
第1章 绪论
1.1 研究背景及意义
在飞速发展的今天,我国大量CRH系列动车组和HXD系列电力机车投入运营,与此同时牵引网低频振荡的现象也在许多地区发生和出现。牵引网的低频振荡会对牵引网造成电压电流冲击,从而影响牵引网的正常工作,可能导致机车无法正常开出造成列车晚点,若在列车行驶过程中发生低频振荡,可能导致列车失去牵引力,更加危险。结合以往的事故案例,虽然对机车网侧整流器控制进行了改进,一定程度上减少了低频振荡发生的概率,但是不能完全避免低频振荡不再发生。所以,对牵引网低频振荡的研究是非常有必要的。
1.2研究现状
对于牵引网的低频振荡的抑制研究一直人们研究的重要课题,有许多学者也提出抑制的方法,例如利用比例谐振(Proportional-Resonant,PR)控制抑制电流谐波,采用嵌入式重复控制与N次陷波器相结合的方法,采用有功-无功轴解耦控制法等。虽然提出这么多控制思想和方法,但是每个方法都有各自的缺陷。例如,比例谐振控制虽然能够抑制指定次谐波,在电网电压偏移时,PR控制器的增益会急剧。嵌入式重复控制与N次陷波器相结合的方法实现起来及其复杂,难以实现。有功-无功解耦控制法中d轴控制采用PIR控制器[1],而q轴仍为PI控制器,所以当q轴上谐波不能进行有效的抑制。所以说对于牵引网低频振荡抑制的研究仍有很大的价值和空间。
1.3本文主要研究内容
本文主要研究了自抗扰控制技术在牵引网低频振荡抑制上的运用,并将其对低频振荡抑制的性能与PI控制器低频振荡抑制的性能相比较。对牵引网的低频振荡进行研究和学习,对牵引网进行模型构建。接触并学习自抗扰控制技术,对自抗扰控制技术的原理进行学习习和理解,根据参考资料对自抗扰控制器进行模型的搭建,然后试图将自抗扰控制器的模型模块替换掉原模型中的PI控制模块,将其整合成完整的牵引网低频振荡抑制的自抗扰控制模型,并对模型进行仿真,将仿真结果与系统加入主动阻尼控制的仿真结果进行比较分析。同时还学习了PI控制技术,学习了将PI控制技术运用于牵引网的低频振荡抑制上。本文研究的重点为:
(1)牵引网的模型建立;
(2)对牵引网低频振荡现象产生的原因和抑制方法进行学习和分析;
(3)学习PI、PID控制技术和自抗扰控制技术;
(4)对四象限整流器控制系统进行模型搭建并分别加入主动阻尼控制和自抗扰控制进行仿真,并对仿真结果做出分析。
第2章 牵引网低频振荡
2.1牵引网电力谐波的产生
所谓的谐波是指电力系统中除了公共网基频以外,任一周期性讯号。在电力系统中线性负荷不产生谐波,只有非线性负荷会产生电力谐波,例如铁磁性设备,电弧性设备,电力电子转换器等会产生谐波。电力谐波具有往低阻抗地方流的特性,电网的短路容量较大,阻抗较小,所以通常谐波负荷产生的谐波电流流向电网。一般设备越先进,谐波的污染越严重。
在铁路网四通八达的今天,牵引网低频振荡引起的事故也时有发生。早在1996年,挪威牵引网发生过低频振荡的事故。挪威牵引网的供电频率为16.67Hz,而公用电网的频率为50Hz,所以变电所需对供电制式进行转换,文献报道,El18型机车投入牵引网运行时,用于供电制式转换的旋转变频机组中出现了频率为1.6Hz的振荡。由于机组负荷进一步减小了特征频率的阻尼,最终导致牵引网的网压等多个量出现同步低频振荡。除了挪威之外,瑞典、德国、美国等国家也发生过类似的低频振荡事件。我国首例牵引网低频振荡事故发生在2008年大秦线上,在湖东机务段,多台型号为 的机车同时升弓,使得牵引网发生频率为3到4Hz的低频振荡,最终导致牵引封锁,无法正常发车[2]。除此之外,在2010年,我国北京和沈阳等地发生过 频率为5Hz的持续振荡。2014年,徐州北铁路枢纽测试时,由于投入机车过多,导致牵引系统出现了频率为2Hz的振荡[3]。
的机车同时升弓,使得牵引网发生频率为3到4Hz的低频振荡,最终导致牵引封锁,无法正常发车[2]。除此之外,在2010年,我国北京和沈阳等地发生过 频率为5Hz的持续振荡。2014年,徐州北铁路枢纽测试时,由于投入机车过多,导致牵引系统出现了频率为2Hz的振荡[3]。
2.2低频振荡的机理
根据目前的研究,对于低频振荡的产生机理,主要分为下面几方面:
(1)负阻尼机理:系统调节措施的作用使得负阻尼增大,增大的负阻尼与系统中的电机、励磁绕组等产生的正阻尼相抵消,扰动在负阻尼的状态下被放大,最后导致系统振荡。
(2)模拟谐振机理:当输入信号或者扰动信号与系统固有频率之间存在某种特定的关系时,此时系统中的各个信号之间会产生较大幅度的共振或者谐振,当产生的共振或者谐振的频率处在频率较低区域时,系统中就产生了低频振荡。
(3)由于发电机的电磁惯性而产生的低频振荡:一定条件下,发电机的励磁电流比发电机励磁电压的滞后产生的滞后控制会引起振荡。
(4)由于励磁调节过度灵敏而引起的低频振荡:快速励磁系统能够提高电力系统的稳定性,减小励磁系统的时间常数。但是过于灵敏的调节可能对较小的扰动作出过大反应,对系统作出过度的调节,使得系统产生新的扰动,以此循环,使得系统产生振荡。
(5)电力系统中非线性奇异现象引起低频振荡:系统的非线性特性使得系统在虚轴附近出现奇异现象。在系统的特征值全部为负值或者有负的实部复数,非线性造成的分歧也有可能让系统状态和特性发生突变,造成增幅振荡。
(6)混沌机理:混沌现象是指非线性系统在完全确定的模型下各系统参数相互作用产生的复杂的不确定现象。如果系统只有阻尼而没有周期性的负荷扰动,不会出现混沌振荡;超出一定范围的周期性负荷回事系统出现混沌振荡;系统中的负荷产生周期性的负荷振荡,且该振荡的阻尼系数接近某一数值会使系统发生阻尼振荡。
除了上述的内部因素以外,还有一些与内部因素互为因果关系的具体的外部因素也会导致低频振荡的发生。
2.3牵引网低频振荡分析方法
对于牵引网低频振荡的分析方法目前可以分为[4]:时域仿真法,频域仿真法和特征值法。
时域仿真法可以观察低频振荡时车网系统各个变量的实时变化,能够有助于对低频振荡现象的理解,通过时域仿真法还能确定包括最多机车容纳量和单个供电区段的最长长度在内的车网系统稳定极限,时域仿真法还可以用于对改进的网侧整流器控制器软件等抑制低频振荡是否有效的验证。但是时域分析法也存在一些不足,时域分析法无法阐明低频振荡的机理,而且时域分析法在多车系统的模型搭建时非常耗时。
特征值法对于牵引网低频振荡的机理可以作出解释,对系统的振荡模式可以做出比较准确的计算,也可以用于评估抑制牵引网低频振荡的方法是否有效。但是党校系统的条件出现较小的变化时,整个系统都需要重新计算且计算量很大。
频域分析法可以对牵引网低频振荡的机理进行更加清晰地分析,对于牵引网系统可以进行更加形象直观的分析。而且频域分析法中大系统模型是由各个子系统构建的,所以整个牵引网系统的改动和重建较为容易。
2.4牵引网中低频振荡的抑制方法
(1)对牵引网进行改善
多辆机车同时共处于“弱电源”之下,牵引网容易发生低频振荡,可以通过改善牵引网的条件来抑制低频振荡,而改善牵引网的实质就是减小牵引网阻抗。可以通过在电网中采用柔性交流输电装置来抑制低频振荡,例如,可以通过晶闸管控制串联电容器来改变输电线路阻抗;采用并联静止无功补偿器快速调节无功功率,使电压能够稳定;将广域测量信号作为输入的静止同步串联补偿器提供附加阻尼控制等。主要通过减小等效电源阻抗和提供额外系统阻尼来抑制低频振荡。
(2)修改网侧整流器控制参数[5]
对牵引网系统进行频域分析法分析,发现可以通过对网侧整流器的控制进行改进来改善系统在低频域的动态特性来达到抑制低频振荡的效果。韩智玲,王晖,Hana Yohannes Assefa等人通过研究提出一些通过修改网侧控制器参数来抑制低频振荡的方法。王晖根据车网系统频域模型,对主导点随车网侧整流器控制参数的变化趋势图进行绘制,揭示牵引网系统低频稳定性如何受网侧整流器控制参数影响。韩智玲通过对机车直流电压的函数进行研究提出减小直流电压PI控制器中的比例参数从而来减小系统中出现低频振荡的概率。Assefa提出通过修改网侧整流器中的IGBT的死区时间来达到抑制系统低频振荡的效果。
(3)增加功率振荡抑制环节
通常可以通过在电力系统中加装电力系统稳定器达到抑制低频振荡的效果。Steinar Danielsen对电力系统稳定器的结构进行参考,提出在牵引网网侧整流器控制中使用功率振荡抑制模块达到抑制低频振荡的目的。王晖在Steinar Danielsen思想的基础上提出设计了更适合国内牵引网的功率振荡抑制控制器,其工作原理是在网压降低时,在网流给定值中适当增加容性分量,在网压升高时,适当加入感性分量,达到相位补偿的效果,从而减小低频振荡。通过simulink软件仿真验证了该方法能有效抑制低频振荡。
(4)修改网侧整流器控制结构
Carsten Heising提出多变量控制法,其原理是将网侧整流器的网流与直流环节电压两个主要状态变量当做一个状态列矢量,并通过仿真验证了该方法的有效性。
2.5 PI控制的原理
PI控制器即为比例积分控制器,与PID控制器相比,PI控制器少了微分控制环节,因为PID控制器的微分环节会对输入的噪声进行放大,被放大的噪声信号会影响PID控制器的稳定工作运行,所以在实际运用中,一般对PID控制器的微分环节做弱化处理或者去掉,将PID控制器当做PI控制器进行使用。
PID控制主要由比例控制环节,积分控制环节和微分控制环节3部分组成[6]。其中,比例控制环节是在系统出现偏差时,按照一定的比例反映偏差,同时比例调节产生调节作用来减小偏差。在调节过程中,比例的调节作用越大,调节就越快,误差越小,但是,如果比例调节作用过大,反而会降低系统的稳定性,使得系统不稳定。积分控制环节主要作用是对系统稳态误差进行消除,提高系统的无差度。当系统存在稳态误差时,积分调节环节进行调节,当无差时,积分调节环节才停止工作,输出一个常数值。积分时间常数Ti决定积分作用的强弱,Ti越大,积分调节的作用越弱,Ti越小则作用越强。但是积分调节会降低系统的稳定性,增加动态响应的时间。微分调节环节可以对系统的动态性能进行改善。微分调节作用可以对偏差信号的变化趋势进行预见,通过超前的控制作用,对偏差进行消除。对微分调节的时间微分时间选择合适可以对调节时间进行降低,并可以减少超调。但是微分调节环节会对噪声干扰进行放大,所以较强的微分调节会影响系统的抗干扰能力。
PID控制可分为电流跟踪控制和电压跟踪控制。串联RCL电路可以用来模拟电流跟踪型的PID控制器。图4为电流跟踪型的PID控制器模型,其数学模型表示为:
 (2-1)
(2-1)
支路电压表示为:
 (2-2)
(2-2)
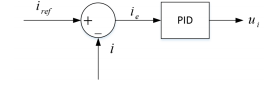
- 框图模型
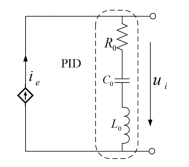
- 电路模型
图1 电流跟踪型的PID控制器模型
去除PID控制器的微分环节,即去除串联线路中的电感 ,即可得到PI控制器。
,即可得到PI控制器。
并联GLC电路可以用来模拟电压跟踪型PID控制器。图5为电压跟踪型PID控制模型。 为并联支路的总电压,则支路总电流为:
为并联支路的总电压,则支路总电流为:
 (2-3)
(2-3)
- 框图模型
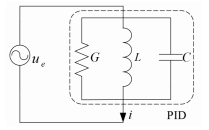
- 电路模型
图2 电压跟踪型PID控制器模型
用该电路模型模拟PI控制器,只需将支路中的电容C去掉即可。
2.6 PID控制技术
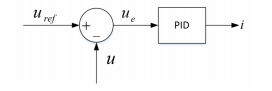
PID控制技术是一种以误差本身为参照量来减小误差的控制技术,在工程实践中广泛应用PID控制技术来达到控制效果。但是PID控制技术由于受早起产生时期科技水平的限制,无法通过先进数字信号处理技术来提高性能。图6为PID控制技术的结构框图,
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


