2.基于PLC的巷道式堆垛机运行及货叉机构控制系统设计毕业论文
2020-04-04 12:51:21
摘 要
随着国内电子商务的迅速发展,以科学技术的不断进步为支撑基础,企业现代化生产规模不断扩大,随之的库存规模也不断扩大。因此,企业对于仓库的容量和作业效率有了更高的要求。堆垛机作为自动化立体仓库重要的搬运设备之一,可以适应企业的库存需求,提高仓库的作业效率。因此,对于堆垛机控制系统的研究与设计具有十分重要的意义。
本文以巷道式堆垛机为研究对象,通过对堆垛机系统进行功能分析从而设计堆垛机的控制系统。首先对巷道式堆垛机的功能进行分析,基于作业过程进行堆垛机控制系统的整体设计。在控制技术方面,本系统主要采用PLC可编程逻辑控制器作为堆垛机运行的控制器件,根据堆垛机的实际工作需求在水平方向选择激光测距绝对认址方式的认址方式,结合S型速度曲线模型进行速度控制。通过传感器的探测,确定货叉的状态,设计货叉的控制顺序。在软件设计方面,本系统模块化的程序编写方式,采用西门子编程软件STEP7进行程序编写,实现货物出入库的自动控制。
关键词:堆垛机;PLC技术;控制设计
Abstract
With the advancement of electronic technology and the rapid development of e-commerce, the scale of modernized production of enterprises has been continuously expanding, and the scale of inventories has continued to expand. Therefore, companies have higher requirements on the capacity and operational efficiency of warehouses. The stacker crane is one of the important handling equipments for automated warehouses, which can adapt to the company's inventory requirements and improve the warehouse's operating efficiency.
This thesis takes the roadway stacker as the research object and designs the control system of the stacker crane through the functional analysis of the stacker crane system. As the main working machine of the three-dimensional warehouse system, the stacker crane plays an important role in getting out of storage. By analyzing the stacker's operation flow, the overall design of the stacker crane control system is determined. This system mainly uses the PLC programmable logic controller as the control device for stacker crane operation. According to the demand of the system, the address selection method in the horizontal direction is the absolute addressing method of laser ranging, and the speed control is combined with the S-type speed curve model. Through the detection of the sensor, the status of the fork is determined and the control sequence of the fork is designed. In the aspect of software design, this system's modularized program writing method uses Siemens programming software STEP7 to program and realize the automatic control of goods entering and leaving the warehouse.
Key words:Stacker; PLC Technology; Control Design
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究背景 1
1.2 研究目的及意义 2
1.2.1 研究目的 2
1.2.2研究意义 2
1.3 国内外研究现状 3
1.4 研究内容 3
第2章 堆垛机控制系统整体设计 5
2.1堆垛机控制系统设计及组成 5
2.2堆垛机出入库作业流程 6
2.2.1堆垛机入库作业流程 6
2.2.2堆垛机出库作业流程 7
2.3 堆垛机控制模式 8
2.4本章小结 9
第3章 堆垛机控制系统分析和硬件组成 10
3.1 堆垛机水平行走的位置控制 10
3.1.1认址方式 10
3.1.2激光测距控制系统网络结构 10
3.1.3 激光测距传感器选型 11
3.2 堆垛机水平行走的速度控制 12
3.2.1 速度控制方式选择 13
3.2.2 堆垛机速度控制曲线 14
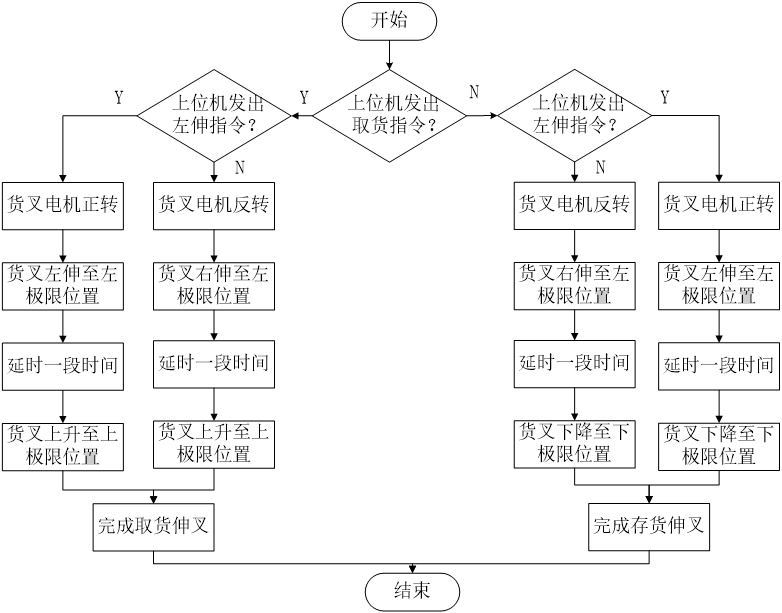
3.3 堆垛机货叉伸缩控制 15
3.3.1 货叉伸叉控制 15
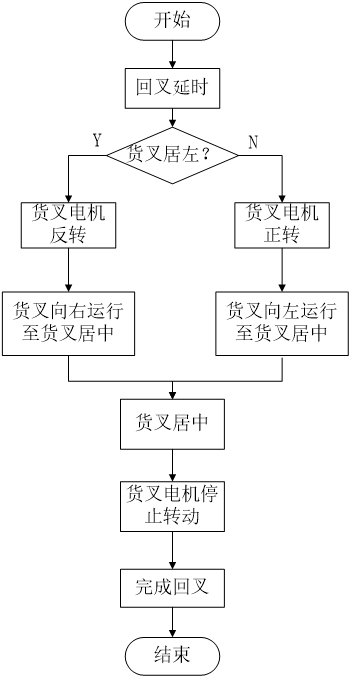
3.3.2 货叉回叉控制 16
3.4 硬件组成设计 17
3.5 PLC输入输出I/O分配设计 20
3.6 本章小结 22
第4章 堆垛机控制系统PLC程序设计 23
4.1 PLC控制技术相关介绍 23
4.1.1 PLC的工作方式 23
4.1.2 PLC的编程软件与编程语言 23
4.2 PLC程序编写 23
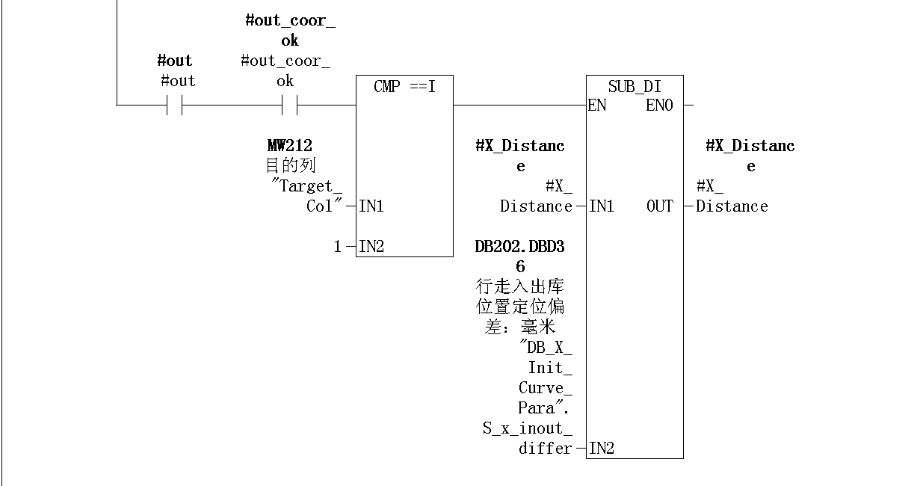
4.2.1 定位寻址程序设计 23
4.2.2 水平速度控制程序设计 29
4.2.3 货叉伸缩程序设计 37
4.3本章小结 42
第5章 总结与展望 43
5.1 论文总结与分析 43
5.1.1 论文总结 43
5.1.2 经济性分析 43
5.1.3 环保性分析 43
5.2 展望 44
参考文献 45
致谢 46
绪论
1.1 研究背景
随着经济的发展与现代科技水平的不断提高,社会对于物流行业的要求越来越高。尤其是近几年来电子商务的快速发展,在为中国互联网经济带来新的发展机遇的同时,对于物流行业来说也带来了新的机遇与挑战。一方面,电子商务的快速发展拉动物流行业仓储与配送环节的需求增长,这对于许多从事运输配送和仓储的物流企业来说是一个机遇;另一方面,电子商务所带来的巨大订单需要一个容量更大和周转效率更高的仓库,以及更加及时的配送,这对于企业来说也是一个不断创新的挑战。此外,随着中国制造企业不断的“走出去”,制造业也需要一个效率更高的生产物流。其中,仓储环节占十分重要的地位。
基于物流行业的基本特点以及日益发展创新的科学技术,自动化立体仓库的建立能够更加及时有效地处理订单,满足顾客需求。自动化立体仓库主要由高层立体货架和一些自动化机械设备组成,运用计算机控制管理技术,以巷道式堆垛机为主进行存取作业的系统,实现了自动化作业方式。为适应新的库存需求,自动化立体仓库具有明显的适应性和优势:
库容量更大,适应日益增长的仓储需求;
采用机械设备作业,包括堆垛机等,降低人工成本,提高出入库效率;
采用库存管理系统,提高库存管理的准确性和快速性。
自动化立体仓库的计算机控制,高层存储,自动存取特点,使传统人工作业、人工管理的以储存为主的仓储作业变成了机械化和自动化的新型仓库作业,充分利用了空间,提高了仓库作业效率,为企业带来了库存优势和社会效益。
作为自动化立体仓库系统最重要的环节之一,堆垛机可以有效的地进行货物的自动化出入库,同时提高货物堆放的高度,有效地利用了仓库的高位空间。货物出入库主要通过采用智能化的自动化设备,由计算机进行控制从而达到自动化存取。为了应对不断增长的物流需求,自动化立体仓库对堆垛机的工作性能要求不断提高。因此,为了提高堆垛机系统的适用性,需要对堆垛机系统的组成及控制原理有深入的理解。
基于上述研究背景,本文以巷道式堆垛机为研究对象,根据堆垛机所要实现的功能进行控制系统的设计结合PLC控制技术完成对堆垛机系统的控制。
1.2 研究目的及意义
工业生产规模的不断扩大为自动化立体仓库出现创造了需求条件,而科学技术的不断进步为自动化立体仓库的建设提供了技术基础。自动化立体仓库是以高层货架为主体,搬运设备为作业支持,计算机管理技术为软件支持的高效物流周转的仓储系统,通过使用现代化设备技术与管理技术从而支持企业大批量库存周转,提高仓储环节物流效益。
作为自动化立体仓库常用的物流搬运工具,巷道式堆垛机主要承担货物出入库的功能,货物出入库流程如图1.1所示。
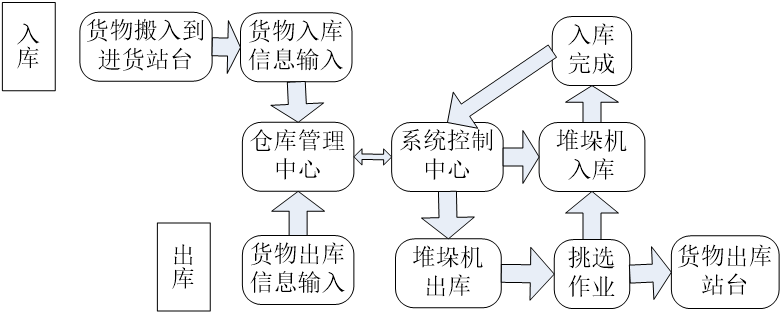
图1.1 货物出入库流程
1.2.1 研究目的
⑴通过对堆垛机系统进行作业分析,明确堆垛机所实现的控制功能:①动作控制:水平方向的运行和货叉伸缩动作;②位置控制:以适合的速度运行并精确的定位;
⑵熟悉和掌握堆垛机的运行原理,进行堆垛机控制系统的硬件结构设计,完成电气原理图的设计;
⑶基于堆垛机系统的控制原理,结合PLC控制技术设计适合货物出入库的堆垛机控制方案。
1.2.2研究意义
⑴通过对堆垛机控制方案的设计,掌握堆垛机系统的运行原理,为堆垛机系统的改进提供基础;
⑵通过设计堆垛机控制方案实现货物出入库自动化,可以降低人工成本,提高货物出入库效率,为企业带来经济效益;
⑶堆垛机的系统的而设计与使用,可以充分利用高层空间,增加仓库容量,提高空间利用率,降低企业的固定成本;
⑷堆垛机系统作为自动化立体仓库的重要组成部分,可以提高货物的周转率以适应逐渐增加的物流需求。
1.3 国内外研究现状
随着我国经济不断的发展,物流行业也得到迅速的发展,企业面临的仓储压力也不断增加。为了应对这些实际问题,自动化立体仓库的规模也不断扩大,堆垛机面临的作业难度也不断增加。因此,必须提高整个堆垛机系统的控制性能,降低任务执行周期,从而满足企业的需求。
堆垛机作为自动化立体仓库中重要的搬运设备之一,对于其控制系统的研究主要由以下几个方面:堆垛机控制系统的认址技术、堆垛机控制系统中关于堆垛机速度的控制、堆垛机控制的算法优化、堆垛机系统的运行与监控等。这些问题都是根据堆垛机在实际运行中所要完成的功能和作业目标而进行研究的,对于提高堆垛机在实际作业环境的工作效率具有十分重要的意义。
堆垛机的运行效率主要由堆垛机的运行速度所决定。我国对堆垛机的速度控制研究经历了一个过程,在20世纪80年代初,堆垛机的速度控制主要采用子母电机或变极电机复合的方式,机械式地进行速度切换来进行控制;80年代后期,变频器的使用,改变速度控制的模式,大幅度地提升速度变化;此后,随着技术的进步,AS21模式被开发与应用,实现了没有冲击的平稳速度控制
关于堆垛机控制系统的研究,国内有许多文献介绍了堆垛机控制系统的方案设计。王惠在《基于PLC的巷道式堆垛机控制设计》中分析并设计了巷道式堆垛机的结构及动作过程,控制器的选件类型,以及编程思想。王晓辉研究了在自动化立体仓库环境下对实现堆垛机功能的控制。马春熠研究了巷道式堆垛机的重点问题包括堆垛机信息显示,作业地址等。孙永吉等着重研究了堆垛机的取货装置,对于货叉的结构优化提供参考。王雪等在《基于模糊PID的堆垛机控制系统研究》中设计了堆垛机的闭环控制系统结构,采用模糊PID控制方式优化堆垛机控制参数并进行仿真,实现控制系统精确定位和性能优化。薛广库等在《激光测距绝对认址技术在巷道堆垛机中国的应用》介绍了应用于堆垛机控制系统的相关激光测距技术,包括激光测距认址方式,以及激光测距结合变频器的闭环调速等。
国外进入21世纪后,随着物流市场需求的不断扩大,急需企业研发新的装备技术,推出高性能的物流搬运产品。同时国外学者研究智能算法在堆垛机控制系统的优化应用。HIROFUMI MATSUO等学者研究了基于知识系统下在计算机集成制造(CIM)环境中对于堆垛机起重机的控制,其中主要涉及智能起重机调度(INCS)系统的开发。
综上所述,结合国内外对于巷道式堆垛机的研究,可以总结出堆垛机的研究方向都朝着高速、高加速、低振动、安全、智能的方向发展,以满足日益增长的物流需求。基于该研究背景,本文研究了关于巷道式堆垛机的自动化控制问题。
1.4 研究内容
本文以堆垛机系统的控制方案为主线,根据堆垛机所要实现的功能,进行堆垛机系统的结构设计,包括硬件组成及相关的电气原理图绘制,进一步结合PLC控制技术进行程序的编写,完成堆垛机的自动化控制系统设计。其中包括理论学习和实际设计,从而实现自动化出入库的功能和目的。
论文的第一部分主要对整篇论文的概述,主要介绍了堆垛机控制系统的研究背景,研究目的及意义,以及论文的整体思路;第二部分主要是对堆垛机系统作整体的介绍,确定堆垛机系统所要实现的功能,梳理堆垛机系统的工作流程以及所需要的控制结构;第三部分是对控制方案的详细设计,主要是对堆垛机的定位认址,水平运行(包括速度控制)以及货叉伸缩提出设计方案;第四部分是根据第三部分的控制原理,结合PLC控制技术编写PLC梯形图程序;第五部分是对全文的总结及方案可行性分析,包括环保性分析和经济可行性分析,控制方案可以改进的方向。论文框架图如图1.2所示。
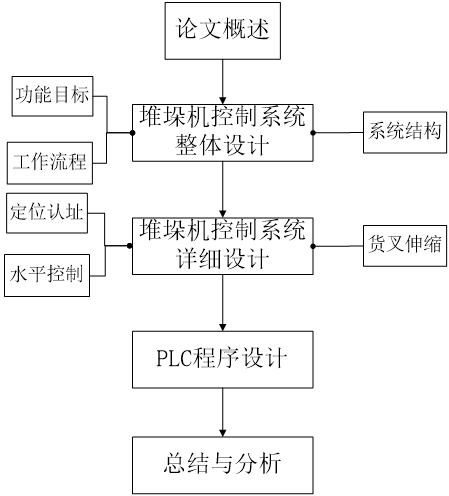
图1.2 框架图
堆垛机控制系统整体设计
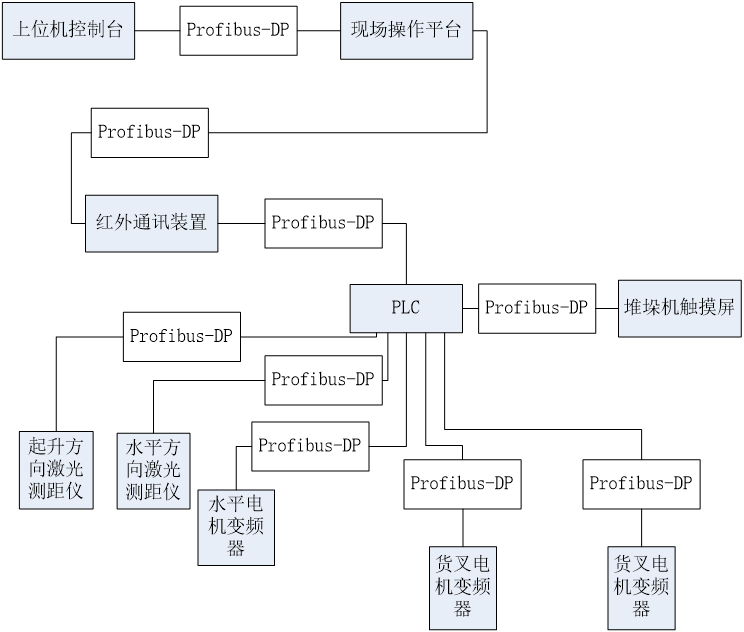
2.1堆垛机控制系统设计及组成
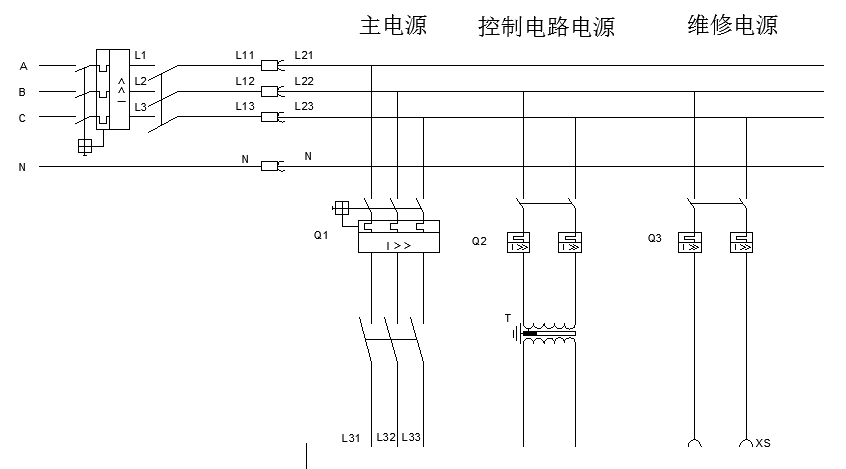
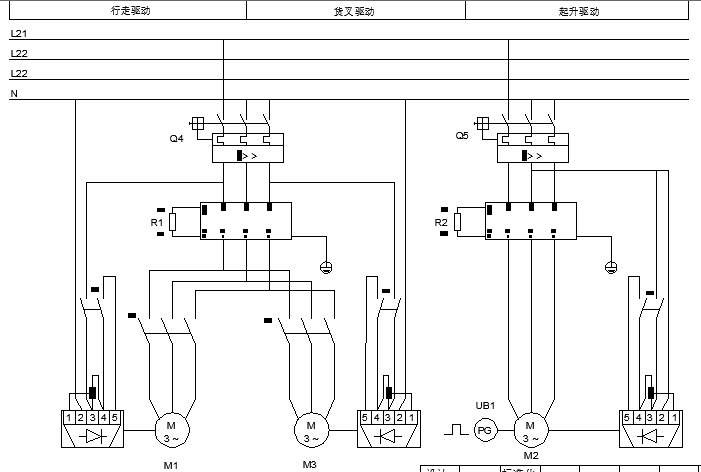
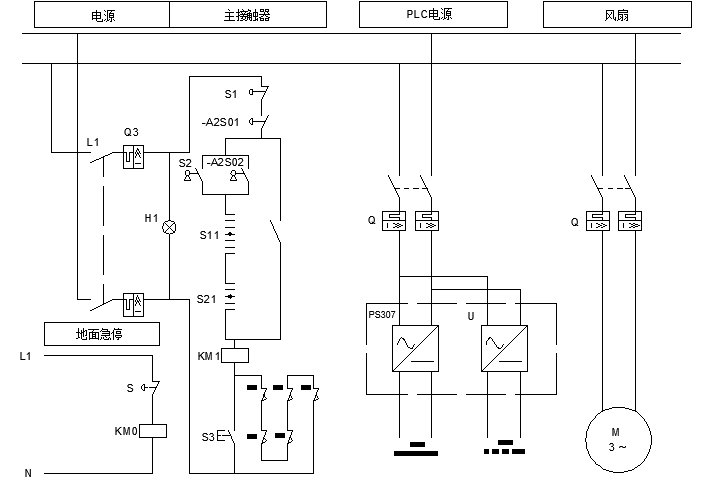
巷道式堆垛机控制系统主要由仓储调度计算机、监控计算机、触摸屏、PLC控制器(西门子S7-300)、变频器和执行机构等组成。其结构框图如图2.1所示。
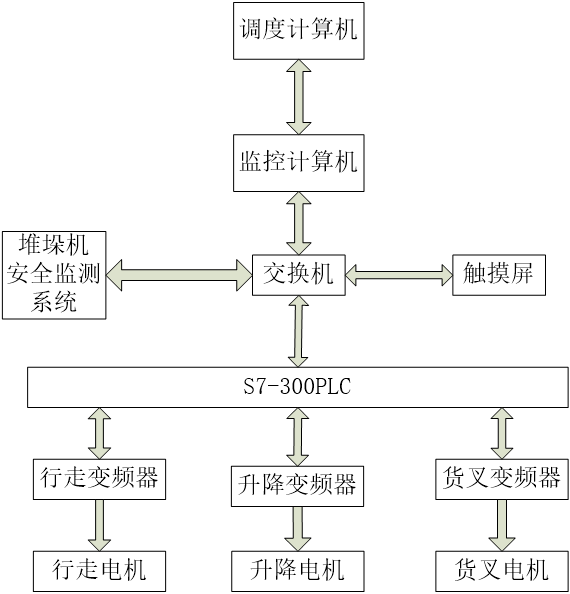
图2.1 结构框架图
巷道式堆垛机的功能是完成货物的出入库,通过堆垛机设备的自动化过程完成货物的取货与卸货。由仓库管理人员完成订单的调度计算机录入,此时监控计算机即上位机将得到的货位信息指令发送给PLC,对应地控制执行机构动作,具体的执行动作包括行走电机、升降电机和货叉电机等运动完成取货卸货指令。如图2.1所示,本系统设计PLC控制器控制变频器,变频器与电机相连控制对应的执行机构运行。在巷道式堆垛机控制系统的具体设计中表现为通过一台西门子S7-300PLC控制器,分别控制行走变频器、升降变频器和货叉变频器这三种变频器。不同的变频器分别与对应的电机相连,即行走电机、升降电机和货叉电机,从而可以控制水平行走运行机构、升降运行机构和货叉伸缩机构运行。而S7-300PLC、计算机、触摸屏、变频器等分别与交换机的连接则采用现场总线方式,可以实现对堆垛机的实时监测与控制。
2.2堆垛机出入库作业流程
堆垛机的主要功能是完成货物的自动化出入库。在进行堆垛机控制系统的设计时要先了解堆垛机的作业流程,才能更加明确地设计堆垛机系统的控制方案。
在堆垛机控制系统中,有两类输入信号:一是来自人工控制的操作面板上的指令按钮,如启动按钮、高速按钮、左伸按钮等;另一类型是来自巷道式堆垛机工作环境的传感器开关,如货位检测开关、极限位置开关等。堆垛机作业的入货口与出货口为同一位置,作为零位平台。系统运行时,堆垛机首先处于零位平台,上位机发送取货或存货指令至PLC,PLC将具体的货物信息动作指令发送至堆垛机对应执行机构。首先堆垛机水平运行机构沿水平方向运行至目标货位号所在列的位置,同时升降运行机构沿垂直方向运行至目标货位号所在行的位置。到达目标货位停准后,货叉执行机构开始动作完成取货或存货。
2.2.1堆垛机入库作业流程
在进行入库作业前,堆垛机控制系统通过传感器检测零位平台上有无,在取货指令时该平台无货物,存货指令时检测到有货物。以存货指令为例,上位机获取目标货位地址后,将入库存货指令发送给PLC。PLC控制堆垛机进行定位寻址,从而将零位平台上的货物存放至目标货位,然后停准。继而货叉运行动作,实现货物从到载货台到货架的转移。整个入库过程未触动警报正常运行则完成入库流程。其中堆垛机入库作业流程如图2.2所示。
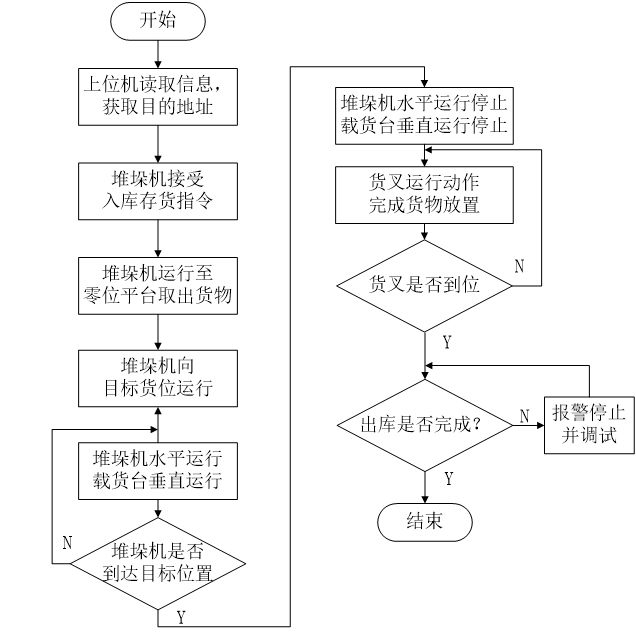
图2.2 堆垛机入库作业流程
2.2.2堆垛机出库作业流程
堆垛机出库作业流程同入库作业流程相类似,堆垛出库机的动作同入库相反。其中堆垛机出库作业流程如图2.3所示。
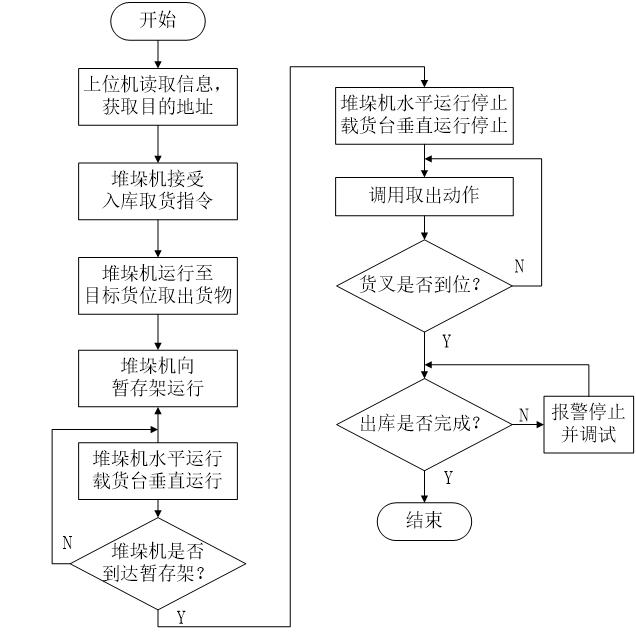
图2.3 堆垛机出库作业流程
2.3 堆垛机控制模式
本文设计的堆垛机控制系统主要有以下几种控制模式:
手动模式“单:机 手动 在线”钥匙开关置于“手动”位置,由操作人员在堆垛机上进行操作,可对堆垛机进行单方向的手动操作 ;
运行模式:“单机 手动 在线”钥匙开关置于“手动”位置,由操作人员在堆垛机上进行操作,通过操作终端设置层、列地址,使堆垛机处于水平行走、升降状态而未进行取货存货操作;
单机模式:“单机 手动 在线”钥匙开关置于“单机”位置,由操作人员在堆垛机上进行操作,通过操作终端设置取货和放货层、列、排地址,可使堆垛机进行完整的取放货操作 ;
在线模式:“单机 手动 在线”钥匙开关置于“在线”位置,地面“通讯器电源”钥匙开关置于“开”位置,由调度计算机控制堆垛机进行完整的取放货操作 。
堆垛机系统可以在上述4种控制模式下进行工作。
2.4本章小结
本章主要是对堆垛机控制系统做整体的设计。这对于后续的详细设计方案起到一个思路的整理以及提纲的作用。首先要了解堆垛机控制系统所设计的电气设备,以及各自的作用。其次,巷道式堆垛机的主要功能是完成货物的自动化出入库。对于堆垛机系统的出入库作业流程也必须有正确的认识和了解。在明确堆垛机系统的电气组成和作业流程后,才能进一步做详细的控制方案设计。最后,确定堆垛机的多种控制模式,完善堆垛机控制系统的控制方式。
堆垛机控制系统分析和硬件组成
3.1 堆垛机水平行走的位置控制
3.1.1认址方式
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


