3.智能算法在堆垛机优化控制中的应用研究毕业论文
2020-04-04 12:51:27
摘 要
自动化仓库中最重要的搬运设备是堆垛机,它是自动化立体仓库的最重要的部分。自动化立体仓库的优越性在于其本身具有自动化、智能化、效率化的特点,节约了大量的人工劳动力和仓储物流成本。所以自动化立体仓库越来越受到物流相关企业的关注,它在物流领域中将会为国家与社会带来巨大的经济利益。因此,如何更好地提高自动化仓库的运营效率是我们需要解决的一个研究课题。本文便是通过对堆垛机的研究,提高立体仓库的效率。
本文主要对堆垛机的定位方案以及水平运行方向上的速度控制进行研究。经过研究分析,堆垛机的定位方式有光电开关认址、激光测距和编码器认址三种,通过比较三者的优缺点确定了激光测距作为堆垛机水平运行机构的定位方案。由于激光测距能够精确测量出堆垛机运行时的位置距离,根据得到的数据,可以对堆垛机水平运行方向的速度控制进行优化。堆垛机的传统控制方式有直接控制,变频器控制,伺服驱动器控制。这三种控制方式都存在在速度的切换时,由于加速度的变化过快,导致堆垛机产生较强的机械振动的问题,这在实际应用中是需要尽量避免的,因为这会导致堆垛机上取货送货时,货物从托盘上掉落。因此,本文在堆垛机的控制系统上运用了模糊控制算法进行改善,即在控制系统中添加一个模糊控制器,使堆垛机在离目标位置较远时采用最高速度,快接近目标位置时采用较慢速度,快到达目标位置时采用慢速度,实现堆垛机运行平稳快速,减少货物从载货台上因为机械冲击而掉落的失误。最后,本文用matlab对堆垛机的模糊控制进行建模仿真,从而得出结论是堆垛机控制在应用模糊算法后作业效率提高,缩短了作业时间。
关键词:堆垛机;自动化立体仓库;模糊控制;仿真;matlab
Abstract
The most important handling equipment in automated warehouses is the stacker, which is the most important part of an automated warehouse. The advantage of an automated warehouse is that it has the characteristics of automation, intelligence, and efficiency. It saves a lot of artificial labor and warehouse logistics costs. Therefore, automated warehouses are increasingly concerned by logistics-related companies. It will bring enormous economic benefits to the country and society in the logistics field. Therefore, how to better improve the operational efficiency of automated warehouses is a research topic that we need to address. This article is to improve the efficiency of the three-dimensional warehouse through the research of the stacker crane.
This paper mainly studies the positioning scheme of the stacker and the speed control in the horizontal running direction. After research and analysis, there are three kinds of positioning methods for the stacker: photoelectric switch addressing, laser ranging and encoder address. By comparing the advantages and disadvantages of the three, the laser ranging is determined as the positioning scheme of the horizontal operation mechanism of the stacker crane. Since the laser distance measurement can accurately measure the position distance of the stacker during operation, according to the obtained data, the speed control of the horizontal operation direction of the stacker can be optimized. The traditional control methods for stacker cranes are motor control, inverter control and servo drive control. These three control methods all exist in the switching of speed, because the acceleration changes too fast, causing the stacker to produce a strong mechanical vibration problem, which in the practical application needs to be avoided as much as possible because it will lead to stacking When the goods are delivered on board, the goods fall from the tray. Therefore, this paper uses the fuzzy control algorithm to improve the control system of the stacker crane. That is, adding a fuzzy controller to the control system makes the stacker take the highest speed when it is far away from the target position. When approaching the target position quickly, Using slower speeds, slower speeds are used when arriving at the target position to achieve a smooth and rapid operation of the stacker and reduce the risk of falling cargo from the cargo platform due to mechanical shocks. Finally, this paper simulates the fuzzy control of the stacker crane with matlab, and concludes that the stacker crane control improves the operating efficiency and shortens the working time after applying the fuzzy algorithm.
Keywords: automated warehouse; fuzzy control; simulation; matlab
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外发展现状 1
1.2.1 国内外自动化立体仓库发展现状综述 1
1.2.2 堆垛机的控制技术国内外研究现状 2
1.3 本文的主要研究内容 4
第2章 堆垛机结构与定位方法分析 5
2.1 堆垛机的结构 5
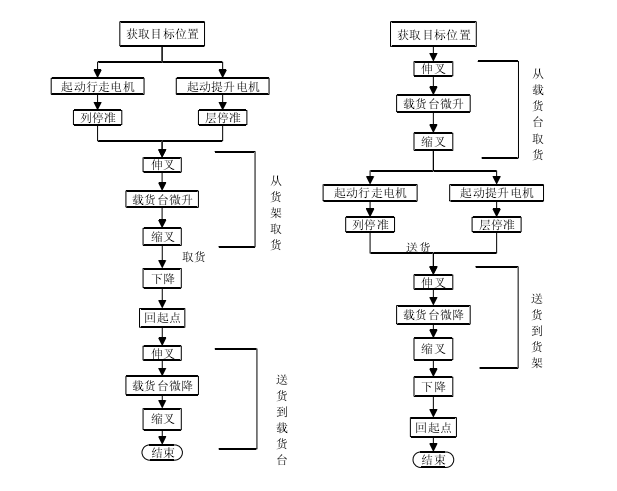
2.2 堆垛机的工作方式 6
2.3 堆垛机的定位控制方式 7
2.3.1 定位原理 7
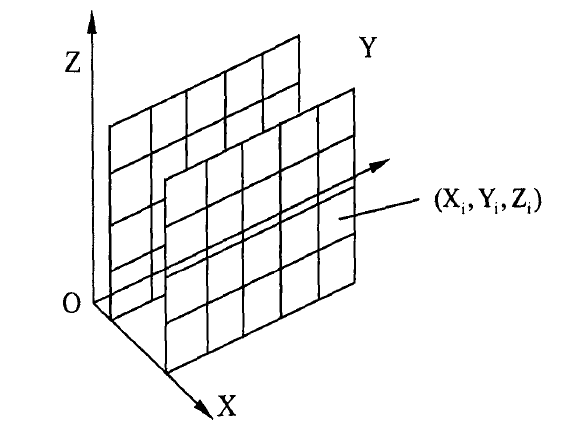
2.3.2 货位的定位方法 8
2.3.3 认址方式 9
2.3.4 激光测距的布置方式 10
第3章 堆垛机模糊控制器设计 11
3.1 传统堆垛机控制存在的缺陷 11
3.2 模糊控制理论基础 12
3.2.1 模糊算法的基本定义 12
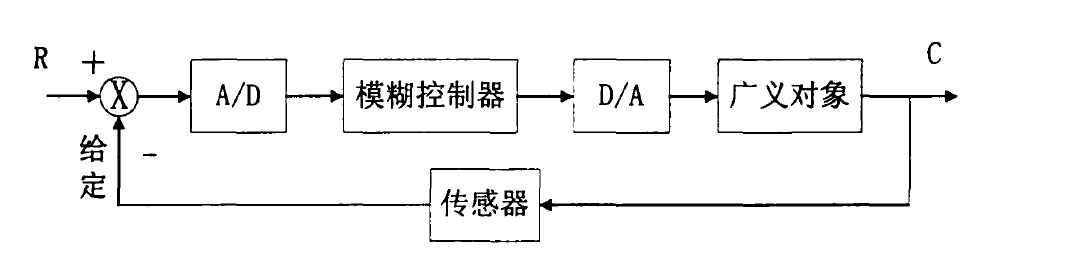
3.2.2 模糊控制系统的结构 14
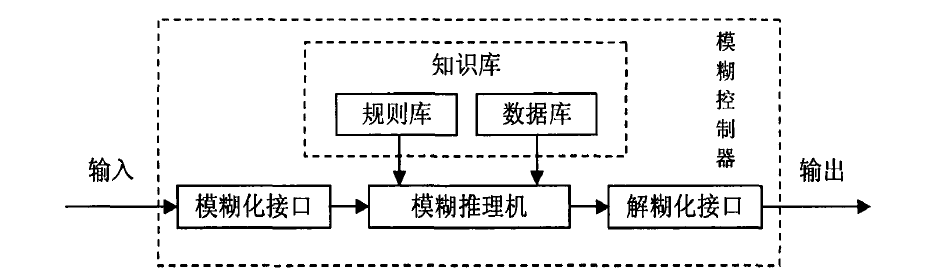
3.2.3 模糊控制器结构 15
3.3 堆垛机模糊控制器设计 17
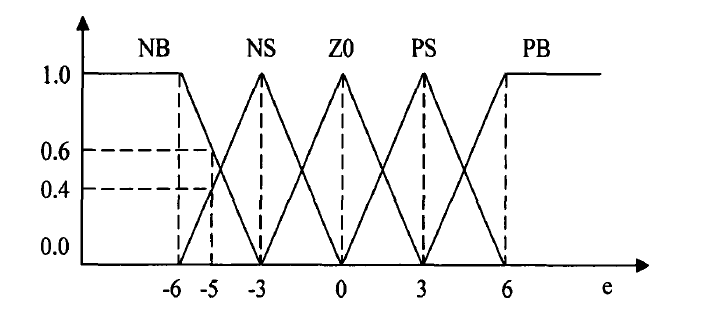
3.3.1 确定隶属函数 17
3.3.2 建立模糊规则库 18
3.3.3 模糊推理 19
3.3.4 解模糊 19
第4章 仿真与结论 20
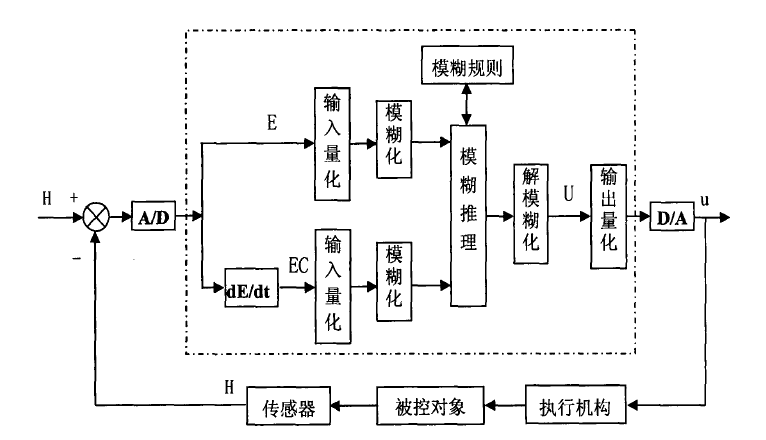
4.1 建立模糊控制仿真模型 20
4.2 结论 23
第五章 总结与展望 24
5.1 经济性与环保性分析 24
5.2 总结 24
5.3 展望 25
参考文献 26
致谢 27
- 绪论
- 研究背景及意义
随着国家经济的不断增长,社会不断进步,国内物流行业的不断扩大,一大批物流企业强势崛起,像顺丰、京东物流、以及“四通一达”。这些都标志着我国物流行业的大力发展是势不可挡的。而在现代物流体系中,自动化立体仓库是极其重要的一部分,它的自动化程度高,具有存货、分拣、点货、包装、分拣配送、存储物流信息等功能,适应了现代物流企业以及市场的需求。同时也节约了大量的人工成本,是自动化生产中不可缺少的组成部分。可以说自动化仓库是我国进入现代化发展的一个重要标志。
自动化立体仓库[1](又称自动存储/检索系统,Automated Storage/Retrieval System,即AS/RS)是多学科领域技术综合而成的智能化和自动化系统,高层货架是其主要特色,拥有系统化的物资搬运设备,通过现代化计算机技术和通信技术相连接,从而实现信息的传递和共享,从而形成高效率的物流手段和大容量的存储机构。其中,巷道堆垛起重机是随着立体仓库的发展而出现的起重机,是立体仓库的专用设备,通常简称为堆垛机。堆垛机的主要功能是将货物从高层货架中不断的存入和取出。
堆垛机早期发展中是桥式结构的起重机[2],通常称为桥式堆垛机,它是在桥式起重机的起重小车上安装有货叉结构的门架,使门架随着起重小车进行上下、旋转运动来存取货物。然后随着研究深入进行,在 1960年美国成功研发出第一台巷道堆垛机[3],它的自动化程度高于桥式堆垛机,而且更适合自动化立体仓库组成。此后,随着巷道堆垛机得到广泛应用,自动化立体仓库的效率得到巨大的提升,取代了桥式堆垛机的地位。在下面本文内容中提到的堆垛机若没特别注明都是巷道堆垛机。
研究如何提高自动化仓库的工作效率,有助于降低企业物流成本和人工成本。而其中堆垛机的工作效率可以说是自动化立体仓库工作效率的瓶颈之一。
- 国内外发展现状
- 国内外自动化立体仓库发展现状综述
- 国内外发展现状
“物流”的概念最早来源于第二次世界大战期间军事后勤工作,而现在其概念已经深入到国家社会的经济流通领域中来[4]。随着经济学家提出物流、资金流、信息流的理论来研究企业运行,物流越来越受到企业,甚至是国家的重视,加大对企业物流体系的建设已成为每个物资流通企业的重点。
在物流行业的发展中,自动化仓库的产生和发展是社会生产力的提高以及市场需求发展的的结果。二战之后,随着工业革命的不断快速发展,信息革命的开始,人们的生活水平以及科技水平不断提高,从而使社会生产力的不断提高,导致许多物资不断增加,例如:原材料、半成品、制成品。对物资的搬运和存取提出了新的要求,所以自动化仓库孕育而生。自动化立体仓库在历史发展中可分为五个阶段:人工阶段;机械化阶段;自动化阶段;集成化阶段以及智能化阶段。其中,前三个阶段是基础,后两个阶段是对其不断的优化改进。
20世纪50年代和60年代,美国首次投入使用安装桥式堆垛起重机的立体仓库,并应用了计算机控制技术[5]。之后,立体仓库投入使用后产生的效益巨大,迅速得到推动和研究形成了专门的学科。到了60年代中期,随着欧美国家立体仓库学科体系的建设,日本开始注意到立体仓库的优越性,从1965年到1977年短短的12年间,日本全国建立了18833座自动化立体仓库,存货总数达262万托盘,在当时成为世界上拥有自动化立体仓库最多的国家之一,时至今日日本在立体仓库的研究与建设方面依旧处于领先地位。
中国国内的立体仓库的发展起步较晚,在1980年,我国第一个配有巷道式堆垛机设备的自动化立体仓库由北京机械工业自动化研究所等单位研制建成并在在北京汽车制造厂投产。自此,我国自动化仓库发展迅速。截至2014年底,中国已建成2500多个自动化立体库,烟草、医药和零售是主要的应用领域,远高于国际平均水平20%。中国物流与采购联合会统计和预测医药、乳业、纺织服装、轮胎、汽车等几个行业未来的物流自动化改造空间,其产生价值分别为600、100、200、300、120亿。未来几年,中国物流仓储自动化仍有很大的发展空间。虽然我国与欧美国家和日本在物流技术水平以及理论知识还存在着巨大的差距,但我国物流企业正不断崛起,如:北京起重机械研究所、苏州富士达、南京六维等,相信随着智慧物流仓储的发展,未来自动化立体仓库会变得更加智能性和普遍性。
- 堆垛机的控制技术国内外研究现状
堆垛机的控制技术自20世纪60年代以来随着立体仓库的使用不断发展进步中,其控制形式可以分为三种:直接控制;变频器控制;伺服驱动器控制。
从20世纪60年代到80年代初,堆垛机的速度控制方式是通过机械的速度模式决定,即子母电动机或变极电极进行复合,机械式地进行高速与低速的切换用于控制堆垛机的运行,限制了堆垛机的运行速度。由于当时交流电机还没得到应用,采用的是直流电机,为了使堆垛机的速度得到提升,故而使用电压切换控制[6],使堆垛机的水平机构速度达到125m/min,升降机构速度达到30m/min。但是,伴随着速度的提升,堆垛机为了滑动停止,必须降低很大的速度。其中高速与低速的速比非常大,水平方向是25:1,垂直方向是4:1。同时由急加速急减速带来的对堆垛机机械结构冲击,产生了机械振动,而为了存取货物时保持稳定,堆垛机停止后需要相当长时间的停滞(3-10s),降低了堆垛机的工作效率。
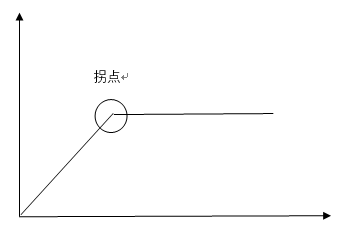
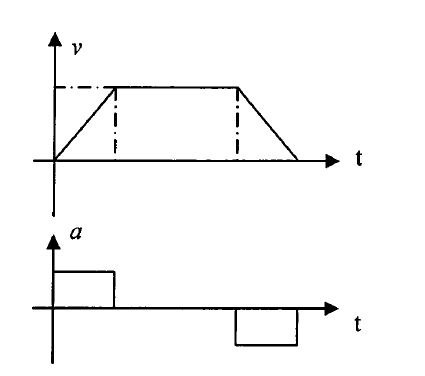 在20世纪80年代后期发明了变频器控制,其工作原理即通过改变电机工作电源频率的方式来控制交流电动机[7]。变频器主要采用交—直—交方式(又称为VVVF变频或矢量控制变频),其工作过程如下:先把工作频率的交流电源通过整流器转换成直流电源,然后再将直流电源转换成频率、电压均可控制的交流电源对电动机进行供电。变频器主要由整流(交流变直流)、滤波、逆变(直流变交流)、制动单元、驱动单元、检测单元微处理单元等原件组成的。变频器控制可以改变高速与低速之前的速度比,是水平机构为50:1,升降机构为15:1,最高运行速度分别达到160m/min和31.5m/min,大大提高了堆垛机的工作效率。同时,当时采取了以梯形曲线为主的速度控制,实现了堆垛机较平稳的机械运动以及低速爬行时间,缩短了机械工作周期。但是,梯形速度控制曲线存在一些缺陷,由于梯形速度曲线采用了线性加速的方法,其所对应的加速度为矩形曲线,如图1.1。因此在其折点处即堆垛机的运行过程中,存在不连续的阶跃,而加速度的不规则变化必然导致堆垛机在运动过程中的跳跃,这在实际应用中是需要尽量避免的,因为这会导致堆垛机上取货送货时,货物从托盘上掉落。
在20世纪80年代后期发明了变频器控制,其工作原理即通过改变电机工作电源频率的方式来控制交流电动机[7]。变频器主要采用交—直—交方式(又称为VVVF变频或矢量控制变频),其工作过程如下:先把工作频率的交流电源通过整流器转换成直流电源,然后再将直流电源转换成频率、电压均可控制的交流电源对电动机进行供电。变频器主要由整流(交流变直流)、滤波、逆变(直流变交流)、制动单元、驱动单元、检测单元微处理单元等原件组成的。变频器控制可以改变高速与低速之前的速度比,是水平机构为50:1,升降机构为15:1,最高运行速度分别达到160m/min和31.5m/min,大大提高了堆垛机的工作效率。同时,当时采取了以梯形曲线为主的速度控制,实现了堆垛机较平稳的机械运动以及低速爬行时间,缩短了机械工作周期。但是,梯形速度控制曲线存在一些缺陷,由于梯形速度曲线采用了线性加速的方法,其所对应的加速度为矩形曲线,如图1.1。因此在其折点处即堆垛机的运行过程中,存在不连续的阶跃,而加速度的不规则变化必然导致堆垛机在运动过程中的跳跃,这在实际应用中是需要尽量避免的,因为这会导致堆垛机上取货送货时,货物从托盘上掉落。
图1.1 梯形的速度及加速度控制曲线
到21世纪初期,企业开始采用了伺服驱动器控制[8]。伺服驱动器的发明使堆垛机的性能有了更大的提升,实现了更高的速度与加速度。伺服驱动器又称为“伺服控制器”、“伺服放大器”,是一种控制器,属于伺服系统的一部分,主要应用于高精度的位置控制。在社会生产中的主要的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,工作过程如下:功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动伺服电机。其控制方式具有数字化、网络化和智能化特点。伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。
堆垛机的伺服控制结构主要采用的是 “伺服驱动器 伺服电机”结构,伺服驱动器通过三种控制方式控制电机:位置、速度和力矩。在伺服驱动器速度控制中,其主要特点如下:(1)调速比为1:5000;(2)转数比为0.3:1500;(3)拥有位置控制与零速锁定;(4)其过载能力为200%―300%;(5)其起动力矩大;(6)电机转速不受负载影响;(7)控制算法采用电流、速度、位置三闭环控制。
- 本文的主要研究内容
堆垛机的每一次改进都使自动化仓库的工作效率不断提高,所以研究其控制过程并对其进行改善具有重大的意义。其位置控制主要包括两个方面:定位以及速度控制。定位控制主要有认址片控制、编码器控制以及激光控制,本文通过比较三者的优缺点来确定其定位方法。而在速度控制方面,则通过研究智能算法在堆垛机控制的应用来进行优化。智能算法有遗传算法、神经网络算法、退火算法和模糊算法等多种算法,本文在这里采用模糊算法[9]对其进行优化。因此,本文的内容结构如下:
第一章:绪论。本章对现代立体仓库以及堆垛机控制进行了描述,介绍了国内外立体仓库的发展历程,以及堆垛机控制技术的不断改进,并对本文的研究背景和研究目的进行了论述。
第二章:堆垛机结构与定位方法研究。本章内容主要介绍堆垛机的主要结构、功能以及工作方式,同时在这节内容中,对堆垛机的定位方案进行了确定,通过比较认址片定位、编码器定位以及激光测距定位的优点和缺点来决定哪种方案作为本文堆垛机的定位方案。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


