桥式起重机智能防摆控制系统的研究毕业论文
2020-04-04 12:51:45
摘 要
在21世界,桥式起重机的应用非常广泛,在港口、仓库和很多大型工程建设中都是必不可少的设备,有着相当重要的运输作用。因此,研究起重机的防摆控制技术有一定实际意义。
本文以桥式起重机为研究对象,分析了国内外桥式起重机智能防摆技术的研究现状,介绍了几种常见的控制算法,并对桥式起重机吊摆系统进行力学分析,利用拉格朗日方程方法建立了桥式起重机吊摆系统的动力学模型,并建立了吊摆系统的Matlab仿真模型,利用仿真实验分析了影响起重机吊重摆角的因素;设计了一种模糊自适应PID控制器,并使用Matlab进行仿真,在改变小车位移 、钢丝绳长度
、钢丝绳长度 、吊重质量
、吊重质量 的情况下分别进行了Simulink仿真,仿真结果可以表明,该控制器具有较好的动态和静态性能、系统的控制时间较短、控制效果较好、效率高,该种方法有较强的可行性和鲁棒性。
的情况下分别进行了Simulink仿真,仿真结果可以表明,该控制器具有较好的动态和静态性能、系统的控制时间较短、控制效果较好、效率高,该种方法有较强的可行性和鲁棒性。
关键词:桥式起重机,防摆控制,模糊PID,仿真。
Abstract
In the 21st world, the application of bridge cranes is very extensive, and they are indispensable equipment in ports, warehouses and many large engineering construction, and play a very important role in transportation. Therefore, it is of practical significance to study the anti-swing control technology of crane.
To bridge crane as the research object, this paper analyzes the intelligent bridge crane anti-swing technology at home and abroad research status, introduces several common control algorithm, and the bridge type crane pendulum system is analyzed with mechanics, and using the method of Lagrange's equation to establish the dynamics model of bridge type crane pendulum system, and establish the pendulum system of the Matlab simulation model, using the simulation analysis of the influencing factors of crane hoisting angular; A fuzzy adaptive PID controller was designed, and the use of Matlab simulation, to change the car displacement, length of wire rope, lifting the quality of cases, respectively, the Simulink simulation, the simulation results can show that the controller has good dynamic and static performance, system control time is shorter, the control effect is good, high efficiency, the method has strong feasibility and robustness.
Keywords: bridge crane, anti-pendulum control, fuzzy PID, simulation.
目录
摘要 I
Abstract II
第一章 绪论 5
1.1 研究背景及意义 5
1.1.1 研究背景 5
1.1.2 研究意义 6
1.2 起重机防摆技术研究现状 6
1.2.1国内研究现状 6
1.2.2 国外研究现状 7
1.3 本文的主要工作 8
第二章 控制算法介绍 9
2.1 PID控制算法 9
2.2 模糊控制理论 11
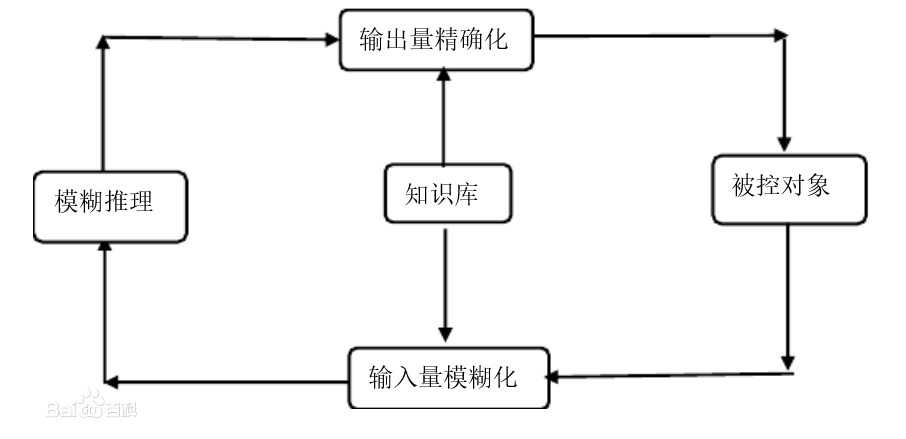
2.3 模糊控制原理 11
2.4 模糊PID控制介绍 13
第三章 桥式起重机系统的建模与分析 15
3.1 桥式起重机的动力学模型 15
3.1.1 模型建立方法 15
3.1.2 模型的建立条件 15
3.1.3 二自由度吊摆系统模型的建立 16
3.2 模型分析 18
3.3 影响吊重摆角的因素分析 19
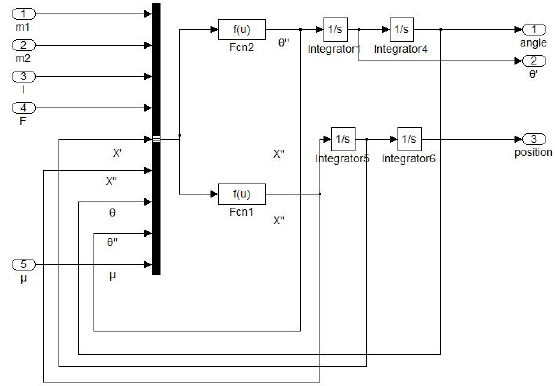
3.3.1 吊摆系统的仿真模型 19
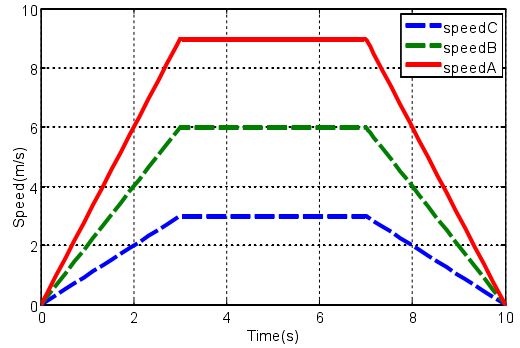
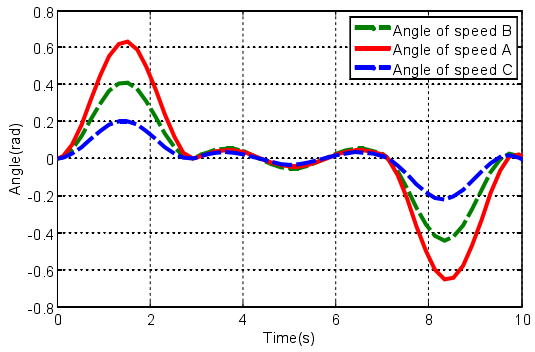
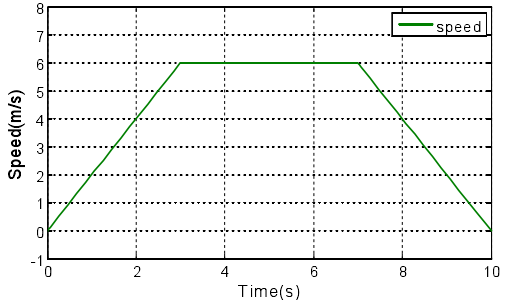
3.3.2 小车运动状态对吊重摆角的影响 19
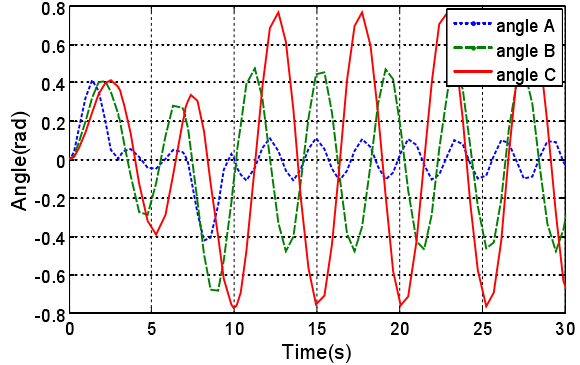
3.3.3 绳长对吊重摆角的影响 21
3.3.4 驱动力对吊重摆角的影响 22
第四章 模糊自适应PID防摆控制器设计 25
4.1 模糊控制器的类型 25
4.2 量化因子与比例因子的调整方法 25
4.3 模糊自适应PID控制器设计 26
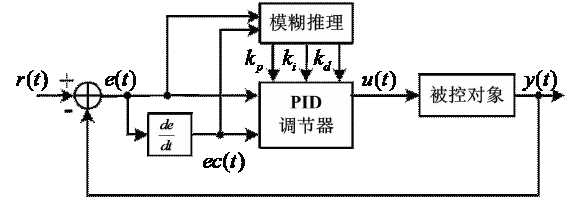
4.3.1 控制器的结构及工作原理 26
4.3.2 输入/输出变量的选取和模糊化 27
4.3.3 模糊控制规则集 28
4.4 模糊PID防摆控制系统仿真 29
4.5 防摆系统的实验与验证 29
4.5.1 钢丝绳绳长变动实验 29
4.5.2 吊重质量变动实验 32
4.5.3 位移对防摆效果的影响 34
4.5.4 仿真结果分析 36
第五章 结论 37
5.1 总结 37
5.2 展望 37
5.3 经济性与环保性分析 37
参考文献 39
致谢 41
绪论
研究背景及意义
研究背景
随着我国经济的腾飞,很多基础工程及设备越来越多。桥式起重机在室内外工矿企业、钢铁化工、铁路交通、港口码头以及物流周转等部门和场所均得到广泛的运用。起重机在这些特定环境中起到了极为重要的作用。桥式起重机是一种大型起重设备,在许多工业环境使用和推广的过程中,也对自动化控制技术有了一定的需求。
桥式起重机是横架在车间、仓库的料场上用来吊运物料的起重设备,它的桥架沿着铺设在两侧高架上的轨道纵向运行,能充分利用桥架下的空间作业,不受地面其他设备的阻碍。桥式起重机可分为普通桥式起重机、简易梁桥式起重机和冶金专用桥式起重机3种。它是使用最广泛、数量最多的一种起重机械。如图 1.1 所示。

图1.1 桥式起重机
普通桥式起重机一般由桥架(又称大车)。提升机构、大车移行机构、小车、操纵室、小车导电装置(辅助滑线)、起重机总电源导电装置(主滑线)等部分组成。桥架是桥式起重机的基本构件,它由主梁、端梁、走台等部分组成。主梁跨架在跨间上空,有箱式、腹板、圆管等结构形式。
在如今的工业环境中,很多时候都需要桥式起重机来吊运大型沉重的货物,而且桥式起重机的大型化使得装卸作业越来越难,增大了事故发生的概率,而一旦发生事故就会造成重大损失,包括经济损失和人员伤亡。在这种情况下,好的起重机防摆控制技术就是必需的。本文就此背景,对影响桥式起重机吊重摆动的各种因素进行综合分析考虑后,设计出一种桥式起重机的智能防摆控制技术。
研究意义
桥式起重机的起重小车由起升机构、小车运行机构和小车架组成。起升机构包括起升电机、制动器、减速器、制动器、卷筒和滑轮组等组成。起重机在作业时,由于受到风力、摩擦力、钢丝绳形变等因素的影响,起重机吊重会摆动,这种摆动类似于单摆运动。如果吊重摆动的摆动幅度达到一定的值,就会严重影响起重机装卸作业,使得起重机定位不精准、物料难以码放,甚至有可能让起重机翻倒,可能造成非常严重的经济损失和人员伤亡。所以,需要起重机防摆技术来减小起重机作业过程中吊重的摆动幅度,增大定位精度。
本文将要设计一种桥式起重机的智能防摆控制系统,此系统能够实现对桥式起重机起到控制作用,使其作业过程更加稳定、定位更加精准、吊重的摆角更加小。这对提高起重机运行安全系数和降低事故发生率具有重要意义。
起重机防摆技术研究现状
1.2.1国内研究现状
我国起重机防摆控制技术起步较晚,在上20世纪八十年代才开始研究起重机的防摆控制系统。起重机的防摆技术主要有以下几个发展阶段:机械式防摆、机械电子式防摆、电子式防摆。因为机械式防摆和机械电子式防摆技术防摆效果不理想,跟不上当今生产生活的需求。当前电子式防摆技术已经是起重机防摆研究的主要研究方向。在电子防摆控制技术领域内,我国的学者已经有了较多的研究成果。
我国学者华克强、高淑玲[[1]]等人使用最优控制器、自适应控制器、模糊控制器等方法,研究了起重机的智能减摆控制技术。
南开大学的马博军[[2]]设计了有一定适应性的起重机防摆控制器,此控制器采用了耗散理论和能量分析的方法。
山东建筑工程学院的李伟等人采用一种基于动态误差的最优控制消摆控制技术[[3]]和一种基于二次最优防摆控制的控制技术[[4]],如图 1.2 所示,是基于二次最优防摆控制结构图。
陈志坚[[5]]等人建立了桥式起重机的数学模型,并对桥式起重机小车的水平运动规律进行了分析和研究。
梁春燕[[6]]等人在防摆控制中应用了滤波技术,这种滤波技术能够抑制系统的残留振荡。
学者王晓军[[7]]等人提出了一种能抑制起重机吊重振荡的最优随机时滞滤波器,该滤波器采用零点配置方法。
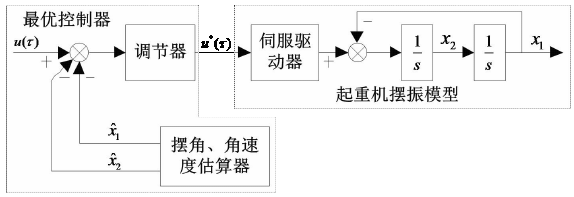
图1.2 基于二次型的开环最优防摆控制框图
学者刘殿通[[8]]等人在模糊控制的基础上引入滑模控制。这种系统不仅能将小车精准定位,还能抑制起重机吊重摆角。
1.2.2 国外研究现状
国外对起重机的防摆技术研究起步较早,在20世纪70年代起重机的定位防摆技术刚刚被提出时国外就开始了这方面的研究。这些年来,新的控制策略和方法层出不穷。
Lee H H[[9]]建立了桥式起重机的三维动态模型,该模型的建立运用了二自由度摆角分析的方法。
Fang Y.、Zergeroglu E[[10]].等人设计了一个比例积分控制器,这种控制器可以减弱桥式起重机自身产生的摇摆振荡阻尼,提高定位精准度。
Pisano A[[11]]设计了一种多阶滑模控制器,该控制器在二阶滑模的基础上与切换面及变化率组成另一个滑模面,该控制器能够减小控制时间,减小起重机吊重的摆角。
波兰学者Nowacki Z、Owezar D[[12]]设计了一种模糊PID控制器用来控制起重机,并且运用变结构理论分析了系统的鲁棒性。
A.Z.AI-Gami等人建立了起重机的三维度度数学模型,实现了控制时间短和误差小的最优反馈控制。
Benhidjeb、Gissinger[[13]]比较研究了起重机的Linear Quadratic Gaussian (LQG )和模糊控制。
Chung C.C.、Hauser J[[14]]等人设计了一种非线性控制器,该控制器能够有效调节吊重的摆动能量,滑模控制系统得到进一步讨论。
在摆角测量方面,韩国的Yong-Seok Kim[[15]]用测量摆角角加速度的方法来测量摆角。
Yu J.、Lewis F.L.、Huang T.[[16]]等人将非线性控制器设计成采用奇异扰动的回路,并在得出了当摆角速度不大于小车运动速度时该方法无效的结论。
Sridokbuap W.、Nundrakwang S.[[17]]等人设计了一种具有良好反应性能的的控制器,该控制器运用CRA控制起重机的小车定位和吊重的摆角。
Singhose、Kim提出了一种可以指定一定地频率范围以抑制振荡的方法,这种方法使用的一种不灵敏整形器,具有较好的鲁棒性。
目前国内在起重机防摆控制技术的领域内与国外还有一定的差距,国外既有许多经典的控制理论又有非常新颖的起重机防摆控制理论(如:神经网络控制、智能控制、自适应控制)。国内在起重机防摆控制领域内的研究相比国外来说较为单一,观点不够新颖、在研究策略及方法上还有所欠缺。
本文的主要工作
在分析了国内外桥式起重机智能防摆技术的研究现状后,本文以桥式起重机智能防摆系统为研究对象,所做的主要工作如下:
第一章:分析桥式起重机智能防摆控制技术的背景和意义,分析了国内和国外的桥式起重机防摆技术研究现状及发展方向。
第二章:介绍了几种常见的控制算法,如PID控制、模糊控制,为后文的工作做铺垫。
第三章:对桥式起重机吊摆系统进行了力学分析,并确定建模条件,利用拉格朗日方程建立了桥式起重机吊摆系统的动力学模型,并使用Matlab仿真软件进行仿真实验,利用仿真实验分析了影响桥式起重机吊重摆动的主要因素。
第四章:在学习分析的基础上,设计了一种模糊自适应PID控制器,并使用Matlab进行仿真,在改变小车位移、钢丝绳长度、吊重质量的情况下分别进行了多组Simulink仿真实验。通过仿真结果分析了影响桥式起重机吊重摆动的各种因素。
第五章:做出了全文的总结与展望,并进行经济性与环保性分析。
第二章 控制算法介绍
2.1 PID控制算法
PID控制是工业控制应用领域中常见的反馈回路组件。它通常由比例单元P、积分单元I和微分单元组成,PID控制的基础是比例控制;积分控制可以消除稳态误差,但可能增加超调;微分控制可以加速惯性系统的响应速度,减弱超调的趋势。PID控制是一种被广泛使用的基本控制方法,它具有应用广泛、高适应性、高可靠性的特点。随着科学技术的进步,一些新的控制方法正在涌现。然而,到目前为止,PID控制算法在工业控制领域仍然发挥着重要的作用[[18]]。
PID[比例(proportion)、积分(integral)、微分(derivative)]控制器是最早实用化的控制器,该控制器已经被使用了近百年的时间,现在依然是应用最为广泛的工业控制器,其系统原理框图如图2.1。
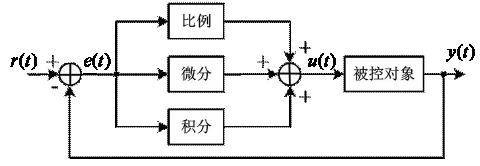
图2.1 PID控制系统原理框图
在如图2.1的PID控制器中, 为给定的输入值,
为给定的输入值, 为系统实际输出值,
为系统实际输出值, 是控制器的输入
是控制器的输入 为系统的偏差。经过控制器运算后得出输出量
为系统的偏差。经过控制器运算后得出输出量 ,作为控制对象的输入,进入受控对象的系统。然后受控系统将会输出y(t)。
,作为控制对象的输入,进入受控对象的系统。然后受控系统将会输出y(t)。
则PID控制器的公式为:
 (2.1)
(2.1)
在式2.1中, 是比例系数;
是比例系数; 是积分时间常数;
是积分时间常数; 是微分时间常数。在实际工程应用中,通常采用离散PID控制方法,即以
是微分时间常数。在实际工程应用中,通常采用离散PID控制方法,即以 为采样周期,
为采样周期, 为采样序号,离散采样时间点
为采样序号,离散采样时间点 对应连续时间t,采用矩阵方法数值积分法进行离散积分运算。
对应连续时间t,采用矩阵方法数值积分法进行离散积分运算。
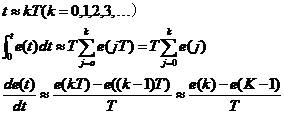 (2.2)
(2.2)
得到离散PID表达式为:
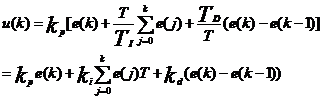 (2.3)
(2.3)
公式2.3中, 为积分系数;
为积分系数; 为微分系数;
为微分系数; 和
和 分别为第
分别为第 和第
和第 时刻的偏差信号。
时刻的偏差信号。
PID控制器一般有三个控制环节:
- 比例控制是最简单的控制形式。控制器的输出与输入误差信号成比例。当只有比例控制系统输出时存在稳态误差。控制器的反应速度与比例系数
 有关,越大,调节能力越强,但系统振荡越大,系统的稳定性也越差。比例系数可以决定控制器的反应速度。 越大控制调节作用将越强,但过大的会使系统振荡,破坏系统的稳定性[[19]]。
有关,越大,调节能力越强,但系统振荡越大,系统的稳定性也越差。比例系数可以决定控制器的反应速度。 越大控制调节作用将越强,但过大的会使系统振荡,破坏系统的稳定性[[19]]。 - 在积分控制中,控制器的输出与输入误差信号的积分成正比。对于自动控制系统,如果进入稳态后存在稳态误差,则该控制系统具有稳态误差。为了消除稳态误差,必须在控制器中引入“积分项”。随着时间的推移,积分项增加。这样,即使误差小,积分项也随着时间的增加而增加,这将使控制器的输出增加,并进一步减小稳态误差,直到它等于零为止。因此,比例与积分(PI)控制器可以使系统稳定而无稳态误差。
- 在微分控制中,控制器的输出与输入误差信号的微分(即,误差变化率)成正比。在抑制误差的过程中,控制系统可能会振荡甚至变得不稳定。其原因是存在一个大惯性分量或延迟分量。它具有抑制误差的功能,并且其变化总是滞后于误差的变化。当误差接近于零时,抑制误差的影响应该是零。也就是说,在控制器中只引入比例环节往往是不够的,比例环节的作用只是放大幅度误差,而需要增加微分环节,它可以预测误差的变化趋势,所以具有比例环节和微分环节的控制器,可以没有抑制误差的控制作用,以避免被控量的严重超调。因此,对于大惯性或滞后的受控对象,比例与微分(PD)控制器可以在调节过程中改善系统的动态特性。选取合理的微分常数
 可使其达到较好的控制效果。
可使其达到较好的控制效果。
2.2 模糊控制理论
模糊逻辑控制理论,简称模糊控制理论,是L.A.Zadeh教授于1974提出的。其核心是建立复杂系统或过程的语言分析的数学模式,使自然语言可以直接转化为计算机可接受的算法语言。20世纪60年代以来,现代控制理论已成功地应用于工业生产过程、军事科学和航空航天等多个领域。但他们都有一个基本的要求,基本要求是他们必须建立一个精确的数学模型。随着科学技术的飞速发展,自动控制系统领域的控制精度、响应速度、稳定性和适应性的要求越来越高,对控制系统的研究也越来越复杂多变。然而,由于控制对象的非线性、时变、参数之间的强耦合和随机扰动等原因而难以建立精确的数学模型。对于那些难以建立数学模型的复杂控制对象,传统的控制方法控制效果不好。而模糊控制手段却能能达到精确的目的[[20]]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


