基于维德曼逆效应的超磁致伸缩旋转激振器设计与研究毕业论文
2020-04-04 12:53:01
摘 要
振动加工技术的出现,突破了传统的加工工艺局限,较好地解决了传统加工过程中遇到的难题,可以加工对于传统加工工艺来讲加工难度较大的材料(如高强度材料、脆性材料、粘性材料等)、加工难度大的结构(如弱刚度结构、难达到结构、微孔、斜孔、阶梯深孔等)、加工难度大的表面等。目前许多振动加工设备利用的是超声振动加工,本课题拟研究设计一种新型旋转型电磁式激振器用于振动加工,以增加振动加工技术的设备选择多样性。
激振器振动的产生致动器的驱动息息相关,而传统的电致致动器具有伸缩位移量小、输出力小、响应慢等缺陷,并且必须高电压驱动、设计复杂,不能满足目前高新技术快速发展的要求,而利用磁致伸缩材料(Giant Magnetostrictive Material.简称GMM)所研发制造的超磁致伸缩制动器,不仅突破了电致致动器的局限,纳米级的精度、微妙级响应速度、输出力大、只需低至几伏至几十伏的电压驱动,而且设计较为简单,电——机转换效率高,是其他材料无法比拟的。
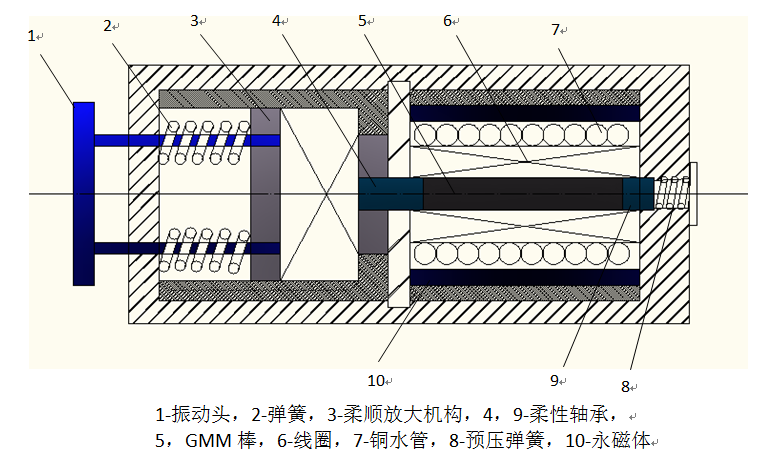
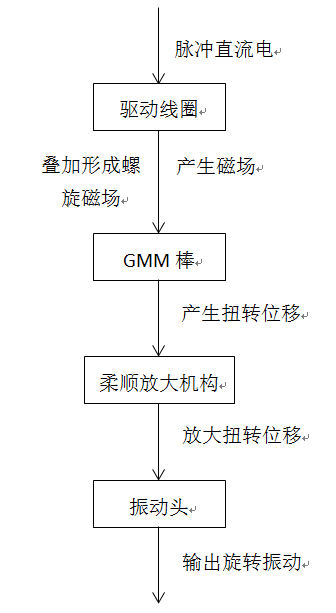
基于上述背景,本课题拟利用超磁致材料的维德曼效应(扭转效应)设计出一种基于超磁致伸致动器的旋转型激振器,不同于现有的直动式超磁致伸缩激振器,本课题研究设计的是激振器是旋转型振动激励,超磁致伸缩致动器在直流脉冲线圈和永磁体叠加的磁场的驱动下产生高频旋转运动,经柔顺放大机构放大该旋转位移形成高频旋转振动,通过振动头的输出,产生合理的旋转型机械振动激励输出,可用于施加在工作对象上产生高频动态的旋转型振动激励。设计完成后通过ANSYS WORKBENCH 15.0对该激振器进行仿真测试优化。对激振器内的旋转型振动头,进行模态分析并确定了振型,得到了固有频率以及共振频率范围。
关键词:超磁致伸缩、维德曼效应、柔顺放大机构、旋转型激振器、模态分析
Abstract
The emergence of vibratory machining technology has broken through the limitations of traditional processing technology, and has solved the problems encountered in traditional machining processes. It can process materials that are difficult to machine for traditional machining processes (such as high-strength materials and brittle materials). , sticky materials, etc.), difficult to process structures (such as weak stiffness structures, difficult to reach structures, microholes, slant holes, step deep holes, etc.), difficult to machine surfaces, etc. At present, many vibration processing equipments use ultrasonic vibration processing. This project is intended to study and design a new rotary electromagnetic exciter for vibration processing to increase the variety of equipment selection for vibration processing technology.
The actuator of the exciter vibration is closely related to the driving of the actuator. However, the traditional electro-actuator has the defects of small telescopic displacement, small output force, slow response, etc., and it must be driven by a high voltage and the design is complex and cannot meet the current high and new technology. With the rapid development of requirements, giant magnetostrictive materials developed by Giant Magnetostrictive Material (GMM) have not only overcome the limitations of electro-actuators, but also have nano-level precision and subtle response speeds. The output power is large, only a few volts down to tens of volts, and the design is relatively simple.
Based on the above background, this project intends to design a rotating exciter based on a giant magnetostrictive actuator using the Wiedeman effect (torsional effect) of a giant magnetostrictive material, which is different from the existing direct-acting supermagnetism. To the telescopic exciter, the exciter is designed to be a rotary type vibration exciter. The giant magnetostrictive actuator generates a high-frequency rotary motion driven by a magnetic field superimposed by a DC pulse coil and a permanent magnet. The mechanism amplifies the rotational displacement to form a high-frequency rotational vibration, and generates a reasonable rotary mechanical vibration excitation output through the output of the vibration head, which can be used to generate a rotational-type vibration excitation that generates high-frequency dynamics on a working object. After the design is completed, the exciter is simulated and optimized through ANSYS WORKBENCH 15.0. The oscillating vibration head in the exciter was modally analyzed and the mode shape was determined, and the natural frequency and resonance frequency range were obtained.
Key words:Giant magnetostriction, Widman effect, compliant amplification mechanism, rotary exciter, modal analysi
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 激振器研究现状 1
1.2.1 国外激振器研究现状 2
1.2.2 国内激振器研究现状 2
1.2.3 现有超磁致伸缩激振器 4
1.3 论文主要研究内容 5
第2章 激振器总体设计 7
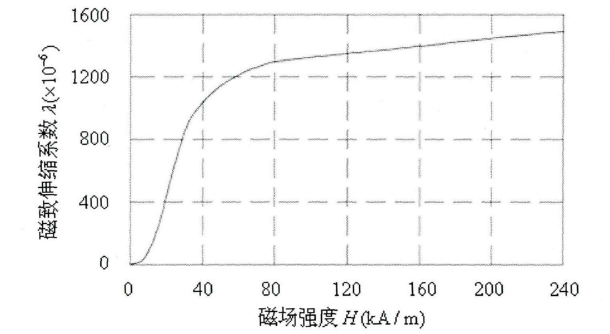
2.1 超磁致伸缩材料及其相关特性 7
2.2 激振器总体结构 7
2.3 激振器工作原理 9
2.4控制原理概述 10
2.5本章小结 10
第3章 超磁致伸缩致动器设计 11
3.1 超磁致伸缩材料选型 11
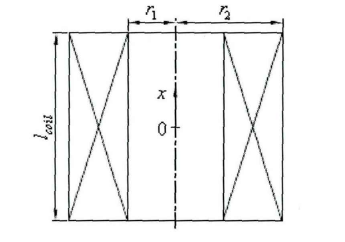
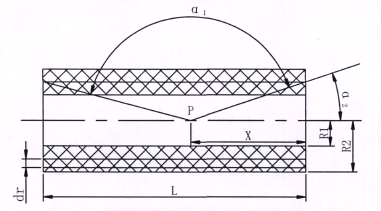
3.2 磁场分布 12
3.3 线圈设计 14
3.4 轴向预压机构设计 15
3.4.1 跳跃效应 15
3.4.2 预压力对性能的影响分析 15
3.5 散热系统设计 16
3.6 本章小结 16
第4章 柔顺放大机构设计与分析 18
4.1 柔顺放大机构概述 18
4.1.1 柔顺放大机构及其特性 18
4.1.2 柔顺铰链 18
4.2 柔顺放大机构设计 19
4.2.1 交叉杆式柔顺铰链 19
4.3 本章小结 20
第5章 振动头的设计与有限元模态分析 21
5.1振动头结构尺寸设计 21
5.2 有限元分析及ANSYS仿真软件介绍 21
5.3模态分析原理及步骤 22
5.4旋转型振动头模态分析 23
5.5 本章小结 26
第6章 经济性与环境性分析 27
6.1 经济性分析 27
6.2 环境性分析 27
6.3 本章小结 28
第7章 结论与展望 29
7.1 结论 29
7.2 展望 29
参考文献 31
致谢 33
第1章 绪论
1.1 课题研究背景及意义
随着机械制造业的不断发展,机械设备的工作稳定性、准确性要求在不断提高,这便对工程施工、机械制造过程中所需的激振器的工作范围和工作精度要求日益增加,同时超磁致伸缩材料出色的焦耳效应使其更多的运用于激振器中,激振器(vibration exciter)用途广泛,可以用于传感器和振动测试仪器的校准,也可以作为振动机械系统的激励部件,实现筛分、输送物料并对其成型、密实,捣固土壤砂石等功能,同时还可以用于振动和强度试验,如振动时效装置。
目前国内外厂家大多数都采用弹性连杆激振、液压激振和惯性激振等振动方式,结构较为简单,但振幅和噪声较大、频率较低,还不太容易实现发泡水泥振动密实所要求的垂直定向振动和工作振源完全同步等技术要求。智能激振器是利用超磁致伸缩材料的磁致伸缩现象而制成的一种新型激振器,这种激振器能够较好的解决上述问题,并完整地实现所要求的功能。在这一背景下开展应用于振动平台的智能激振器的研究具有非常重要的理论意义和实际意义。[1]激振器能够将一定大小和形式的振动量传递给被激物件,从而试验被测物的振动和强度,或调校传感器和振动测试仪器。
超磁致伸缩材料(GMM)在位移分辨能力、应变、响应速度、输出力、能量密度等指标相比压电材料和陶瓷材料都具有明显的优势,它在超精密加工、微电子技术和生物工程等领域的应用日益广阔,有着可观的发展前景。超磁致伸缩材料能量转换是双向可逆的,它的磁致伸缩正效应可在精密致动、流体控制(泵和阀)、声纳系统、主动减振降噪等系统中得以运用,而磁致伸缩逆效应则可以在力、扭矩、磁场强度等传感器件的研制和开发等领域得以运用。传统激振器的驱动方法有惯性式、电动式、电磁式、电液式、气动式和液压式等型式,但是,这些形式的激振器常常存在振幅和频率不能满足工作实验要求的情况。传统电磁式激振器由于采用磁致伸缩材料,输出振动的频率和振幅以及振动方向因为材料和环境的原因具有一定的局限性。[2]因为稀土超磁致伸缩材料存在固有的磁滞损耗,所以GMM在应用于超精密加工控制、准确定位时会存在一些困难。[3-4]
因此基于上述背景,为了高新技术的发展需求,本课题通过运用超磁致伸缩材料的维德曼效应(磁场产生旋转效应),并以超磁致伸缩致动器为基础,,经过柔顺放大机构的对旋转位移的放大,通过旋转型振动头的输出,产生合理的旋转型机械振动激励输出。
1.2 激振器研究现状
1.2.1 国外激振器研究现状
在20世纪50年代激振器的研发和应用就开始了,当时主要是采用电动式激振器做军用战机的整机地面共振实验。法国公司向世界展出具有计算机智能控制的全自动化模态试验设备,电动式激振器数目之多可达32台,按照激振力大小可分为50N、200N、1000N不等。生产的激振器种类繁多,功能齐全,可以实现飞行振动试验和地面共振试验等多种功能。[5]日本振研株式会社在并联机构的空间三维激振装置的基础上研究出来一种可用于空间三平移正弦加载振动模拟的设备,其运动范围较为可观。
1974年A.E.Clark团队开发出的三元稀土合金TbDyFe在常温下的磁致伸缩得到了提高且各向异性最低,这种材料当即得到了全面推广并实用化,这就是GMM的基础。自70年代中期以来,材料的制造工艺和材料成分对性能的影响以及实现商品化生产开始成为GMM的研究重点。[6]90年代前后,主要有美国Edge Technologies公司的Terfenol-D,瑞典Feredyn AB公司的Magmek86将GMM的生产推向了商业化,后来日本、俄罗斯、英国和澳大利亚等也相继研究开发出TbDyFe2型GMM。
GMM在国外的应用情况——在磁场的作用下,GMM会产生磁致伸缩,可以制作检测磁场、电流、应变等的元器件;同时也可以利用GMM的磁致伸缩逆效应,将GMM制成扭矩、压力、位移等的传感器件,当前多用普通GMA直接驱动流体控制器件[7]; GMM优良的磁——机转换性能,则可以在超精密加工、微马达以及振动控制等工程领域发挥明显的运用优势;同时GMM驱动元件可用于超精密定位系统,能够实现在低阻抗运行的情况下使输出位移达到压电致动元件的数十倍。
1.2.2 国内激振器研究现状
我国电动式激振器的研制起步较晚,上世纪中叶才开始展开研究。但是当时所研发的激振器的性能指标难以满足工业需求,并不能满足科学研究和生产实践,因此很长一段时期内,我国都是从国外进口各类激振器以工业生成和科研实验。直到1974年,南航振动工程研究所主任、中科院院士赵淳生教授研发的电动式激振器问世,情况才有所改观。赵院士对激振器的研究不断深入,并取得了丰厚的成果,其主要成就如表1.1所示。
除此之外,HIT伺服模拟和测试系统研究所开发了一个三向六自由度液压地震模拟测试系统,后来开发了一个三自由度或六自由度振动测试系统,该系统基于西安交大,同济大学,吉林大学,北京自动化研究所等单位也对励磁机进行了深入研究,取得了丰硕的研究成果。目前,沉阳中展节能产品有限公司开发的超磁致伸缩材料激振器(型号TX-VSR1860)的最大激振力高达60kN。[8]甘肃天兴稀土功能材料有限公司利用巨磁致伸缩激励器和功率控制器构建了智能振动时效装置(如图1.1所示),当功率控制器激发的电流流过驱动线圈时其内部的磁致伸缩杆会产生动态磁场从而使自身产生振动。
年份 | 成果 |
1974年 | 研发出JZQ系列励磁型电动式激振器,并投入生产。 |
1976年 | 研发出永JZQ.7型激振器,是我国第一台自主研制的永磁型电动式激振器。 |
1987年 | 研发的WFB.1宽频带电动式激振器的重要性能指标均可达到当时国外同类激振器的水准。 |
1992年 | 研发出以于高磁能材料Nd.Fe.B为基础的HEV.2型和HEV 5型激振器,其性能指标均处于国际领先水平,标志着我国进入了拥有一流激振器研发制造技术的国家行列。 |
表1.1 赵淳生院士对激振器的研发成果表
我国进入柔顺机构领域的研究相对较晚,北京航空航天大学的于靖军[9-10]等建立了柔性铰链变形刚度模型,提出了一种扩展的伪刚体模型法,并以柔性铰链的刚度矩阵为基础,提出了全新的刚度矩阵法,深入地探讨了空间柔顺机构位置求解问题。华南理工大学的李海燕[11]等基于伪刚体模型法,研究了当从动件的变形或其运动规律一定时大变形柔顺机构原动件的驱动问题,并以可靠度最大为目标,综合概率、疲劳和优化等学科的知识,给出了一种柔顺机构的优化设计方法。

图1.1振动时效装置
1.2.3 现有超磁致伸缩激振器
通过查阅大量文献,我国已研制出超磁致伸缩材料驱动的激振器,但是工作方式与本课题所研究的旋转型激振器有所不同的是,现有的超磁致伸缩激振器均为直动式,即振动头沿GMM棒轴向移动进行激振,且所用GMM棒的型式与本课题有所不同,现有的超磁致伸缩激振器均用实心棒状材料进行驱动(如图1.2所示),且未设计柔顺放大机构对扭转位移将进行放大。本课题则采用空心管状材料,使得GMM棒在叠加磁场中产生旋转位移,而进一步对振动头进行输出,材料如图1.3所示。

图1.2 直动式激振器结构图

图1.3 超磁致伸缩材料
1.3 论文主要研究内容
本论文所研究设计的是基于维德曼效应的超磁致伸缩旋转激振器,即在充分了解掌握了超磁致伸缩材料的工作原理以及柔顺机构学的基础上,设计出一种以超磁致伸缩致动器为驱动设备,以其产生的高频扭转位移作为振动源,经柔顺放大机构放大,然后通过旋转型振动头输出的激振器,用于在工作对象上施加高频动态的旋转型振动激励。主要研究内容可分为以下四个方面内容:
(1)基于超磁致伸缩致动器与柔顺放大机构的旋转型激振器的设计。参照传统电磁式激振器的结构模型,结合超磁致伸缩材料和柔顺放大机构的特点,设计出一种可输出高频旋转型振动的新型激振器。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


