FBG非接触位移检测及标定系统设计毕业论文
2020-04-05 10:49:23
摘 要
工业生产中,常常要对位移量进行实时并且精确的测量,比如平面振动幅度的检测控制,转轴转动时径向位移的测量等等。这些多是微小位移,需要高精度的位移传感器进行测量,传感器在测量方式上由分为接触式传感器和非接触式传感器两种,但对于接触式的传感器,往往又要考虑到测量环境对传感器的影响,比如腐蚀,磨损等,这些环境条件下会对传感器的使用寿命和测量精度造成很严重的影响,为解决此类问题,非接触式传感器的研究已经成为目前的重点,对于非接触式位移传感器,按照测量原理又可以大致的分为基于光学原理和磁场原理两种,一般基于光学原理的位移传感器虽然精度很高,但其价格很贵,传感器的维护工作也很麻烦。而对于基于磁场原理的位移传感器,往往又会出现传输距离不能过长的问题。
本文设计一种基于磁耦合原理的非接触位移传感器,它结合磁场原理的和FBG能长距离传输的优点,利用磁场力与被测物体之间距离的关系,将位移产生的磁力转换为悬臂梁的弯折,带动FBG产生应变,使其中心波长发生变化,最后经过数据处理和计算,得到位移的大小。
除了设计传感器结果外,本文还设计出一种传感器标定系统,利用一个标定滑轮,促使悬臂梁弯折,进而改变FBG中心波长,利用给定距离产生固定中心波长的静态标定方法进行传感器的标定。
关键词: 位移传感器;非接触;磁耦合;FBG;标定系统
Abstract
In industrial production, it is often necessary to perform real-time and accurate measurement of the displacement, such as the detection and control of the amplitude of the plane vibration, the measurement of the radial displacement when the shaft rotates, and so on. These are mostly small displacements and require high-precision displacement sensors to measure. There are two kinds of contact methods and non-contact methods in the measurement method. However, for contact sensors, the influence of the measurement environment on the sensors is often taken into consideration. Such as erodibility, wear, etc., these environmental conditions will have a very serious impact on the life of the sensor and measurement accuracy. In order to solve such problems, the non-contact sensor research has become the current focus, for non-contact displacement sensor , According to the measurement principle can be roughly divided into two kinds based on the optical principle and the magnetic field principle, generally based on the optical principle of the displacement sensor, although high precision, but its price is expensive, the sensor maintenance is also very troublesome. For the displacement sensor of the magnetic field principle, the problem of the transmission distance cannot be too long.
This paper designs a non-contact displacement sensor based on the principle of magnetic coupling. It combines the advantages of magnetic field principle and FBG long-distance transmission. It uses the relationship between the magnetic field force and the measured object distance to convert the magnetic force generated by the displacement into a cantilever beam. The buckling causes the FBG to produce a strain, causing its center wavelength to change. Finally, the data was processed and calculated to obtain the displacement.
In addition to designing sensor results, a sensor calibration system was also designed to calibrate the sensor using a calibrated sheave that causes the cantilever beam to bend, which in turn changes the center wavelength of the FBG, and uses a static calibration method that produces a fixed center wavelength at a given distance.
Key Words:Displacement sensor; non-contact; magnetic coupling; FBG; calibration system
目 录
第1章 绪论 1
1.1 引言 1
1.2 非接触式位移传感器的研究现状 1
1.2.1 激光式非接触式位移传感器 1
1.2.2 电涡流式非接触位移传感器 2
1.2.3 霍尔效应式非接触位移传感器 3
1.2.4 超声波式非接触位移传感器 3
1.3 本文研究内容 4
第2章 方案选择 6
2.1 方案设计 6
2.2 设计相关理论 7
2.2.1 光纤传感基本理论 7
2.2.2 光纤光栅测量基本原理 8
2.2.3 光纤光栅的温度补偿理论 8
2.2.4 磁场基本理论 9
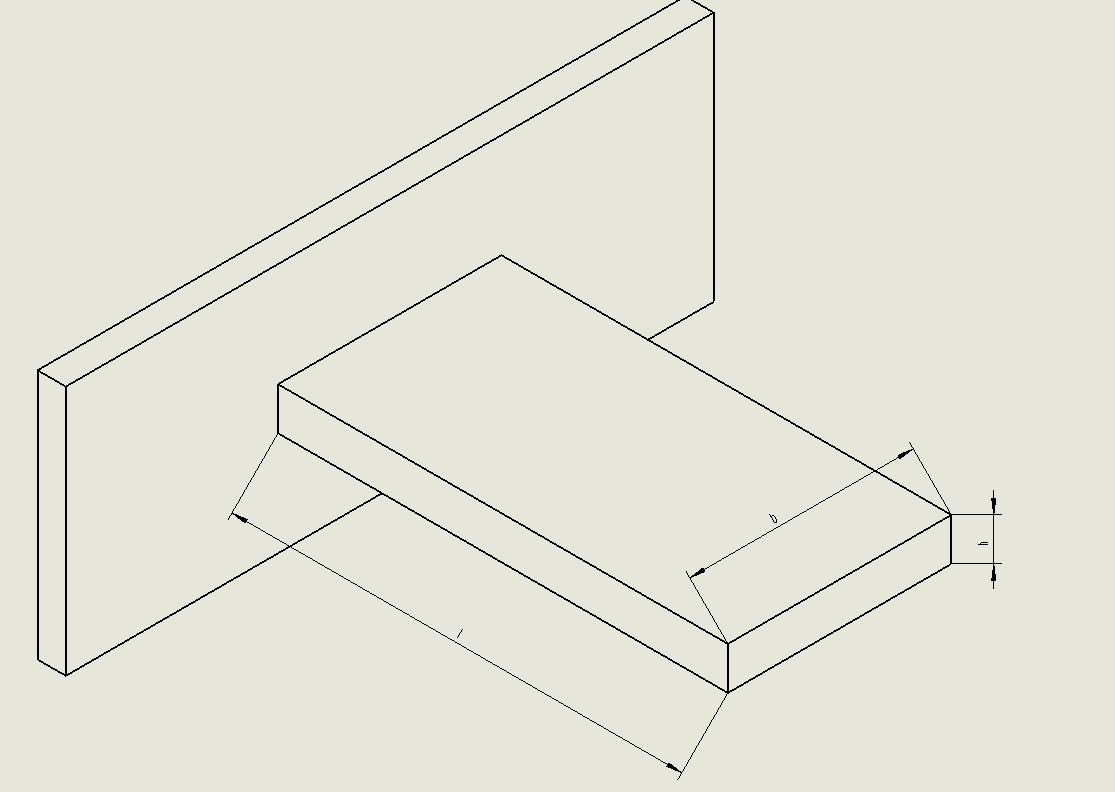
2.2.5 悬臂梁相关理论 9
2.2.6 悬臂梁的分类 9
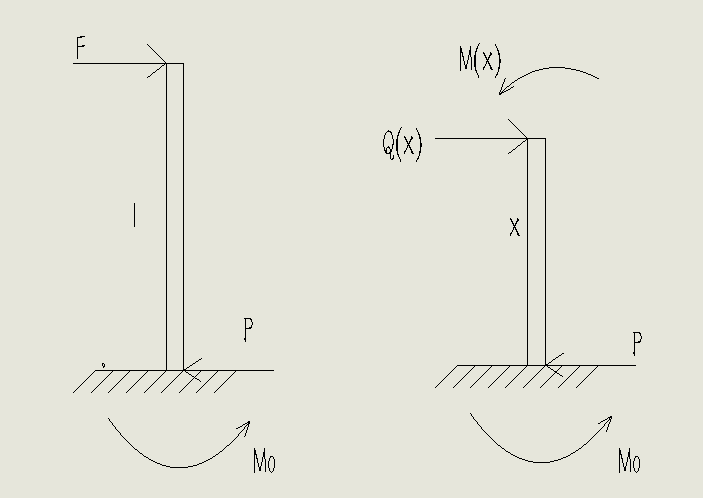
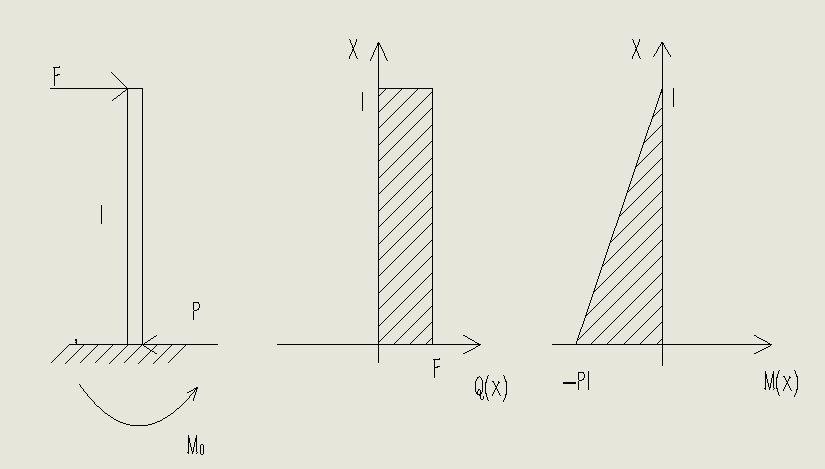
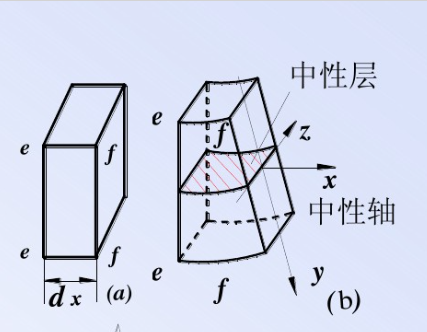
2.2.7 悬臂梁的受力 10
2.2.8 校核理论 12
2.2.9 传感器标定理论 13
第3章 传感器尺寸设计与安装 15
3.1 磁探头 15
3.1.1 磁铁材料及尺寸 16
3.1.2 拉杆材料及尺寸 20
3.2 悬臂梁 21
3.3 卡口 23
3.4 标定滑轮 24
3.5 套筒 25
3.6 箱体 25
3.7 传感器装配与安装 27
第4章 实验与分析 29
4.1 实验原理 29
4.2 实验元器件 30
4.3 实验及记录 32
4.4 数据处理及分析 33
4.5 实验小结 35
第5章 总结与展望 37
参考文献 38
致 谢 39
第1章 绪论
1.1 引言
在工业生产中,很多情况下都需要对物体的位移量进行测量,比如平面振动位移测量,转轴转动时产生的径向偏移测量等等。根据测量方式的不同又可以将其分为接触式和非接触式两种。其中接触式位移传感器是通过与被测物体直接接触,将位移量转换为传感器某一属性的改变进而测得位移量,虽然接触式位移传感器具有测量稳定和精度高的特点,但由于是与被测物体直接的接触,这时候就不得不对被接触物的自身属性进行考虑,例如粘附、腐蚀、磨损等等,这就严重威胁到传感器使用寿命的问题,除此还会对传感器精度有着部分影响。所以近些年来对位移进行非接触式的测量方法发展迅速。
1.2 非接触式位移传感器的研究现状
非接触式位移传感器,就是与被测量物体之间没有直接的接触,通过将位移量转换为传感器元件某一物理量的改变,间接得到被测位移量。其测量方法主要分为基于光学原理和磁场原理两种[1],常见的非接触式位移传感器有:激光式、电涡流式、霍尔效应式、超声波式、磁力式等。
1.2.1 激光式非接触式位移传感器
激光式非接触式位移传感器是基于激光技术的位移测量方法,它由激光器、激光检测器和测试电路组成,按照测量原理,又可以将激光式测量分为测量激光三角法和激光回波分析法,其中激光三角法工作原理为从激光发射器中发射出一束激光,打到被测物体上, 经过反射射到接收系统上。激光发射器、被测物体以及接收系统形成了一个几何三角关系[2],如图1.1所示
半导体激光器①被镜片②聚焦到被测物体⑥,反射光被镜片③收集,投射到CMOS阵列④上;信号处理器⑤通过三角函数计算阵列④上的光点位置得到距物体的距离。
激光三角测量法具有非接触,结构简单和精度适中等优点,但是如原理图所示,由于采用会聚光进行照明,这时被测物体发生位移就会使得照射光远离焦点而降低测量精度,因此测量的量程有限。相比较而言,激光回波分析法则更适合长距离检测。
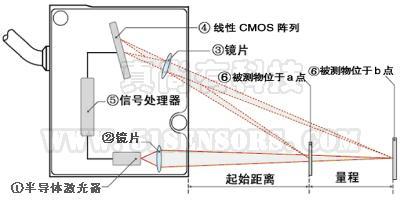
图1.1 激光传感器工作原理图
激光式非接触位移传感器的测量精度很高,例如ZLDS10X激光位移传感器的精度最高可达0.5um。由于激光的高方向性、高单色性和高亮度的特点,它能够实现无接触远距离的测量。基于光学原理的非接触式位移传感器测量具有精度高,测量范围宽,但因为其结构复杂,对测量环境要求严格,所以并不适合在多尘或油腻的环境下进行测量和使用。因此无法在有灰尘和油污的恶劣环境下使用,极大限制其使用范围[3]。
1.2.2 电涡流式非接触位移传感器
电涡流式传感器是一种基于电流涡流效应原理的传感器,它具有结构简单、频率响应宽、灵敏度高、测量线性范围大、抗干扰能力强以及体积小等一系列优点,可以实现对振动位移、尺寸、转速、温度、硬度等参数的非接触测量,并且还可以进行无损探伤[4]。由于涡流效应具有集肤效应,可以根据电涡流在导体中的渗透情况,通常把电涡流传感器按激励频率的高低又分为高频反射式和低频投射式两大类。
电涡流式位移传感器的工作原理是,载有交变电流的激励线圈靠近或者原理金属物体时,利用电涡流效应的产生影响线圈周围磁场的分布情况,从而线圈的阻抗发生变化,进而把距离变化转换为电量的变化,从而做成位移传感器。
但由于其关系是非线性的,因此它的应用也很受到限制。除此之外其灵敏度及线性范围也受到激励频率,被测导体的电导率、磁导率以及线圈匝数的制约[5]。电涡流式位移传感器在许多领域都有着广泛的应用,尤其在高速旋转且不接触的微振动测量中,优越性尤为突出。
1.2.3 霍尔效应式非接触位移传感器
霍尔效应位移传感器是基于磁敏元件在具有梯度的磁场中移动产生的霍尔效应进行工作的。即在半导体薄片上垂直加磁场B,在薄片的两端方向通入控制电流I,则在薄片的另外两端方向就会产生电动势,这种现象称之为霍尔效应,产生的电动势叫做霍尔电动势。其工作原理如图1.2所示。
、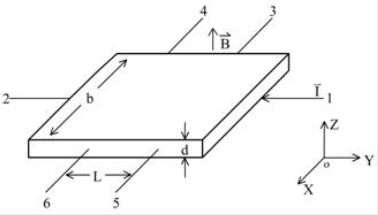
图1.2 霍尔效应原理图
其中霍尔元件的霍尔电动势与磁感应强度有如下的关系:
(1.1)
式中为霍尔元件灵敏度;I为电流;B为磁感应强度。
当和I为定值时,霍尔电压与磁场B具有单值关系,在磁场不饱和时(一般B小于0.5T)与磁场B具有线性关系[6]。当磁场B为一个均匀梯度磁场,霍尔电压取决于霍尔元件在磁场中的位置,据此,可以用霍尔元件来非接触的测量位移量。
霍尔效应式位移传感器具有惯性小,响应快的优点,很适合做现场动态测试,但其工作时需要保持均匀梯度磁场的范围有限,限制此传感器只能进行小范围(通常约1mm)的位移量测量,目前霍尔效应位移传感器已经用于测试纸张厚度,金属材料形变等微小位移测量方面。
1.2.4 超声波式非接触位移传感器
超声波式非接触位移传感器是利用超声波反射原理进行位移测量的。通常分为三个部分:超声波发射电路,超声波接收电路,数据处理系统。其系统模型如图1.3所示。
其工作原理为:单片机系统给超声波发射电路给一个脉冲信号,随后关闭发射电路,计时器开始计时,同时打开超声波接收电路,实现发射与接收信号的同步,在接收电路接收到反射信号后,计时器停止工作得到间隔时间t,最后利用数据处理部分进行数据处理,其关系为:
(1.2)
式中,S为发射点距离障碍物的距离;v为超声波的速度。
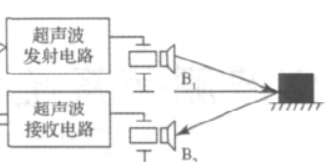
图1.3 超声波测距系统模型
超声波测量位移则需要进行前后两次测量,最后进行测量数据的相减取其差值。一般,超声波位移测量由于不需运动部件,随意在安装和维护上有着很大优越性,且由于不同介质之间都可以实现超声波的反射,所以这也决定超声波测距有着广泛性。但由于超声波的物理性质,也决定了其使用的局限性:
1)由于超声波的速度受到温度影响较大,所以在测距时需要考虑温度补偿来提高其测量精度;
2)由于超声波的反射特性,要求待测物体需要与超声波发射与接收端垂直;
3)不能应用于需要快速响应的场合;
4)无法在多风场合下使用。
1.3 本文研究内容
在非接触式位移传感器中,其工作原理主要分为基于光学原理和磁场原理两种。通过查阅相关资料与本文本章1.2节简介,基于光学原理的非接触式位移传感器,除了有着较大的测量范围外,还较高的测量精度,但是其结构也一般较为复杂,给安装与后期维护带来较大困难,并且其测量的环境要求也较为苛刻,不可以在有灰尘、油污的环境下工作。而基于磁场原理的非接触位移传感器虽然可以在上述环境中工作。但由于磁场的物理特性,决定了其不可以在要求安全不带电、易燃易爆的环境下工作,除此外也无法实现数据的远距离传输[7]。所以综上考虑,本文提出一种新的非接触磁耦合光纤光栅位移传感器,基于光纤的传感器显示出很大的优势,比如高灵敏度,遥感以及可以在恶劣环境中运行的可能性。此外,它们通常非常紧凑,重量轻,并且这就在选择传感器的特性方面提供了很大的自由度[8],有望解决原先磁场测距原理无法进行远距离非接触测量的问题。
第1章主要分析了现有较为常见的非接触式位移传感器技术,介绍部分传感器工作原理及其有优缺点,并且结合光纤光栅与磁场原理测量的优点,提出新的测量方案,来适应测量环境的要求;第2章主要介绍关于非接触式磁耦合光纤光栅传感器所涉及的一些知识,以方便接下来的传感器设计部分;第3章则是传感器设计部分,通过数据计算和材料选择,将传感器结构中如磁探头、标定滑轮、套筒、卡口、悬臂梁等结构尺寸确定下来,最后在进行各部件的组装装配;。第4章主要是实验部分,对实验所测得的数据进行分析,利用理论数据与实验数据的分析对比,对设计的传感器测量位移的可行性进行了验证,并分析误差原因;第5章主要对设计中的收获作总结,并对从设计传感器的发展提出一些建议,希望能在以后有更好的发展。
第2章 方案选择
2.1 方案设计
结合第1章的介绍与比较,在本设计中选择FBG与磁场原理相结合的测量方法进行传感器的设计,其测量原理图如图2.1所示
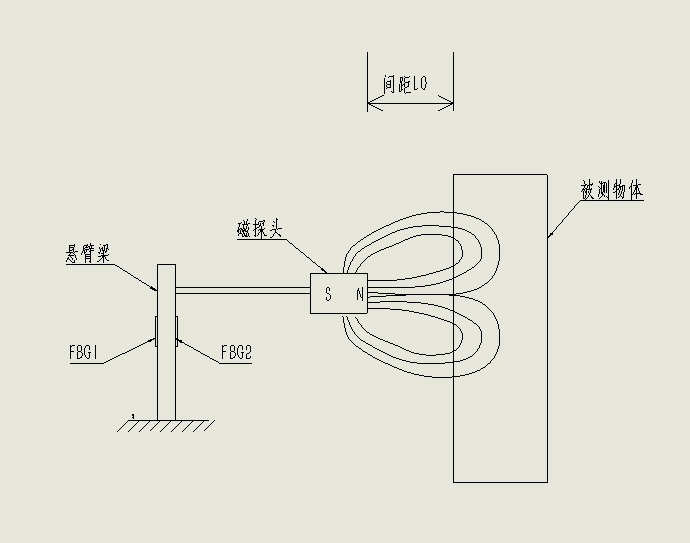
图2.1 传感器测量原理图
当被测物体移动时,会使得被测物体与传感器磁铁探头之间的距离L0发生变化。这时由于磁场原理,两物体之间的磁力会产生相应改变,磁探头带动贴有FBG的悬臂梁发生偏转,进而使得FBG的中心波长发生变化,利用调制解调仪记录波长变化,最后计算处理出位移量。其工作流程图,如图2.2所示
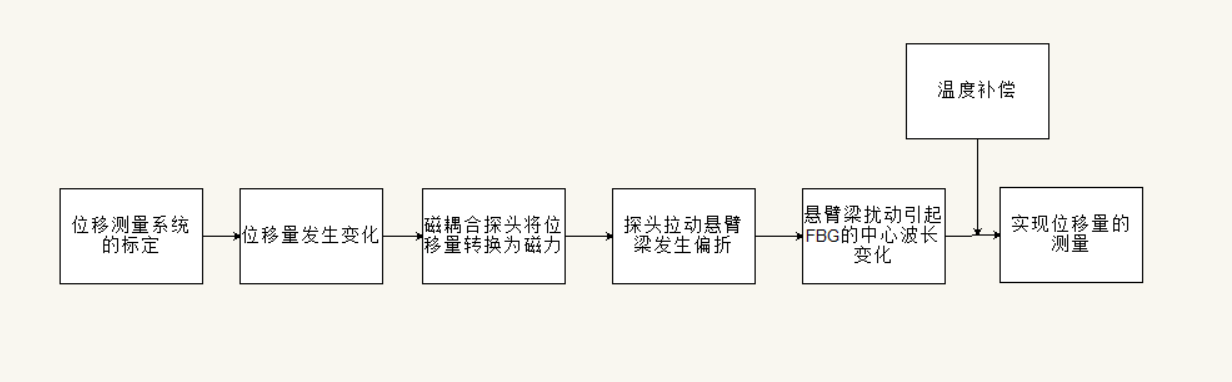
图 2.2 传感器工作流程图
由于在设计中涉及到FBG、磁场、工程及材料力学及传感器标定相关知识,所以下面介绍相关理论知识。
2.2 设计相关理论
2.2.1 光纤传感基本理论
光纤传感器是基于光纤光栅的传感原理的传感器,通过外界物理参量对光纤布拉格()中心波长的改变,测量中心波长变化得到外界参量变化。其光纤传感的基本原理如图2.3所示:
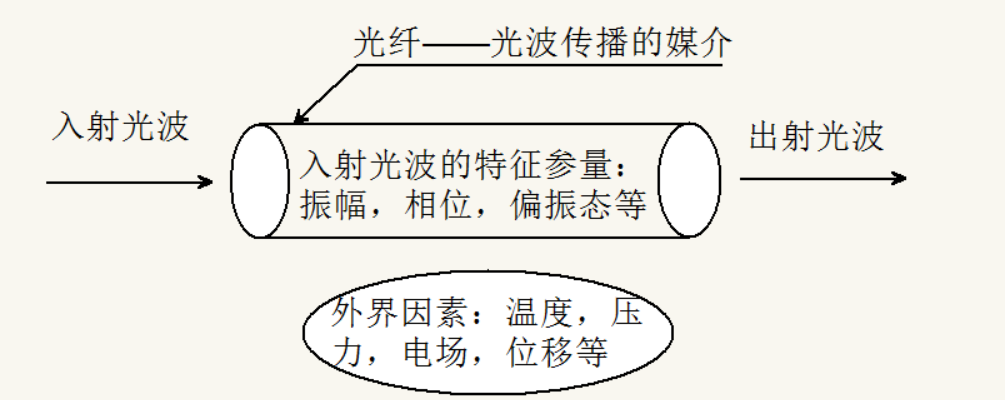
图2.3 光纤传感原理图
光纤传输的光波的特征参量(如振幅、相位、偏振态、波长等)在外界环境因素(如温度、压力、位移、电场、磁场、转动等)作用下间接或者直接地发生变化[9],从而可将光纤用作传感元件来测量各种物理量。通过测量光纤中传输光波的特征参量的变化,就可以实现对各种环境物理量的测量。
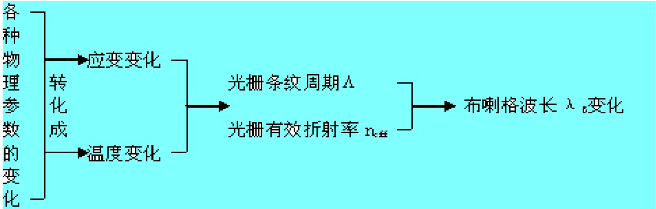
2.2.2 光纤光栅测量基本原理
光纤光栅测量的基本原理如图2.4所示
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


