手推式城市绿化景观小树枝叶修剪车及收集装置设计毕业论文
2020-04-06 13:11:47
摘 要
关键词:修剪,收集,多功能 1
Abstract 2
Key Words:prune , collect , Multifunction 2
第1章 绪论 1
1.1研究的背景及意义 1
1.2国内外研究现状分析 1
1.3本课题主要研究内容 3
1.4 课题研究方法 4
1.4.1分解课题研究目标,抓准研究切入点 4
1.4.2 论文主要内容 4
1.5 本章小结 4
第2章 总体方案设计 5
(一) 修剪收集装置 5
(二) 方位调节装置 6
第3章 修剪及收集装置的设计 8
3.1修剪要求 8
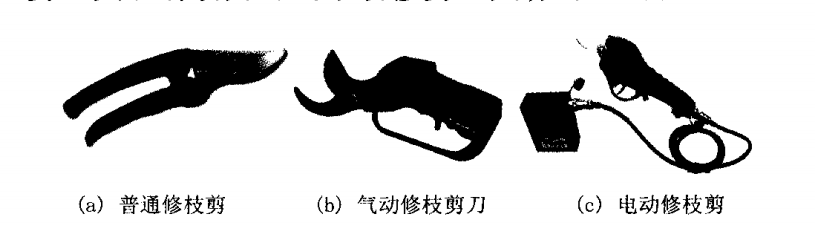
3.2不同修剪装置对比 8
3.2.1单枝选择修剪工具 8
3.2.2整株修剪工具对比 9
3.3 修剪装置的确定 15
3.3.1修剪方案的确定 15
3.3.2 修剪装置结构设计与收集方案 16
(三) 收集方案 20
3.3.3 修剪力的确定 20
3.3.4 刀具受力变形分析及材料的选择 24
3.4 本章小结 24
第4章 方位调节装置 25
4.1方位调节设计思路 25
4.2 液压升降台 25
4.2.1 动力部分 25
4.2.2 剪叉部分 29
1)剪叉材料的选择 29
2)剪叉参数的确定 29
3)剪叉机构的强度校核 30
4)GF杆拉压应力校核 31
5)FG杆弯曲应力校核 32
4.3 滑轨——滚珠丝杠部分的确定 33
4.3.1 滚珠丝杠部分的确定 34
4.3.2 矩形滑轨的选型确定与受力分析与校核 37
4.4 蜗轮蜗杆——回转支承部分的设计 45
4.4.1 蜗轮蜗杆的设计与选型 45
(1)选择材料 46
(2)确定主参数Z1,Z2 46
(3)按齿面接触强度设计 46
4.2.4回转支承的选型 47
4.3 本章小结 48
第5章 电机的选择 50
5.1控制类电机 50
5.1.1对控制电机的基本要求 50
5.1.2常用控制用电动机分类 50
5.2电机的选择 52
5.2.1电机的参数计算 52
2.确定电机的转速 53
3.传递转矩 53
第6章 总结与展望 54
参考文献 55
致谢 56
摘 要
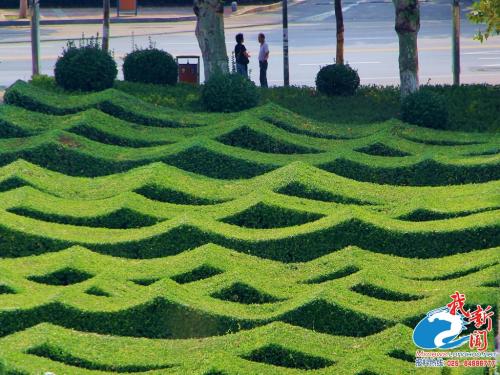
本文主要研究了一种以手推车为载体,以电动机为动力,可连续修剪城市园林绿化景观以及公路两边小树枝叶,并可收集枝叶的专用作业车,并且能够实现对修剪速度以及功率的调节,人工推扶时间过长时还可以实现助力。通过液压装置推动升降台以及伺服电机带动丝杠或机械臂转动实现修剪机械臂的展开、收回状态,高度、角度方向的调节,并完成关键零部件的设计与整合;对于修剪装置,不仅局限于修剪一定高度或者仅限于修剪平面,添加多自由度机械装置,可实现倾斜面、球形、波浪形等不同园林修剪要求。同时收集装置设计简单合理。因不可避免涉及危险修剪装置的使用,本作业车会设置多处急停装置。故该方案特别适合于城市公路中央隔离带绿化带以及路边小景观的修剪,当不需要修剪作业时可快速拆卸作业装置,便于运输,提高了使用效率。而目前市面主要的修剪装置大部分需要手持或者夹持,长期劳作,势必会影响工人身体健康状态和修剪的工作效率,增加劳动成本,且产生的修剪废料无收集装置,作业完后势必会对环境卫生产生影响。
本文特色在于,修剪装置的设计综合市面上大部分修剪装置的优点,吸收其独有、独特、高效的机械以及电子装置,考虑到连续工作时间以及工作强度、噪音、废弃物收集等要求,综合设计。本装置对于城市市政以及居民区物业所进行的日常修剪操作安全性、高效性、多功能性具有重要参考与现实意义。
关键词:修剪,收集,多功能
Abstract
This paper mainly studies a kind of trolley with carrier as the carrier, electric motor as the driving force, which can continuously trim the urban garden green landscape and the small branches and leaves on both sides of the highway, and can collect the special operating vehicles for the branches and leaves, and can realize the speed of trimming and The adjustment of power can also be achieved when the manual pushing time is too long.Pushing the lifting table and the servo motor by the hydraulic device to drive the screw or the mechanical arm to realize the trimming and retracting state of the trimming arm, the adjustment of the height and the angle direction, and completing the design and integration of key components; for the trimming device, not only Trimming a certain height or only trimming the plane, adding a multi-degrees of freedom mechanical device, can achieve different garden trim requirements such as inclined surface, spherical, wavy and so on. At the same time, the collection device design is simple and reasonable.At the same time, the collection device design is simple and reasonable. Due to the inevitable use of hazardous trimming devices, this truck will be equipped with multiple emergency stop devices. Therefore, the scheme is particularly suitable for the trimming of green belts along the central roads of urban highways and the small landscapes on roadsides. When no trimming operations are required, the working devices can be quickly dismantled, which facilitates transportation and improves the efficiency of use.At present, most of the major pruning devices in the market need to be hand-held or clamped. Long-term work will inevitably affect the health status of workers and the efficiency of pruning, increase labor costs, and produce no pruning waste collection devices. Environmental health has an impact.
The unique feature of this paper is that the design of the trimming device integrates the advantages of most trimming devices on the market and absorbs its unique, unique, and highly efficient mechanical and electronic devices, taking into account the requirements for continuous work time and work intensity, noise, waste collection, etc. design. This device has important reference and practical significance for the safety, efficiency, and versatility of daily pruning operations in urban municipalities and residential properties.
Key Words:prune , collect , Multifunction
第1章 绪论
1.1研究的背景及意义
近年来,我国城市公路建设的迅速发展,道路中央分隔带以及道路两侧的小树枝叶以及绿化小景观修剪成为了公路养护的主要任务之一,它不仅关乎到城市环境绿化的美观程度,还会影响驾驶员的视觉,高标准修剪后的绿化景观对驾驶员夜间行车防炫目、吸附车辆排放的废气及小粉尘颗粒、减轻驾驶员视觉疲劳、保证行车安全等方面都发挥了重要作用。除此之外,笔者根据国内外对城市道路景观绿化装置的研究状况,并结合绿色城市的概念和实践,新时期绿色城市具有以下几个发展趋势,绿色城市必须具有一个良好的绿色生态环境,对这一标准的支撑载体就是城市的园林绿化。这一趋势体现在三个方面:①绿色数量不断增加②生态质量加强③景观质量提高。对应的就必须要对城市绿色植被与景观进行相应的修剪,修整与维护,修剪作业为人工操作,故而必须要考虑修剪方法与修剪工具对工人劳动强度的要求,对学历及操作技能要求,劳动效率与劳务费支出问题,更主要的,实施作业工人操作安全问题。因为园林市政施工务必会占用部分行车道,对市民交通出行会造成一定影响,所以修剪装置体积也成了一个必须要考虑到的问题。再其次,对于很多绿化很好的住宅区,修剪绿植是物业部门的一项重要任务,绿化面积和效果越好,对修剪的要求也特别高,特别是对一些高档别墅小区,断断续续的修剪,如果产生大量的噪声,对居民的休息、工作和生活都会产生比较大的影响,会引起居民的反感与厌恶,甚至因为噪声太大会引发很多不必要的麻烦。除此之外,在城市公园、农家乐、园林种植基地等区域,对一个高效率,多功能的修剪装置的需求十分强烈,而市场上大部分的修剪装置功能太过于单一,不够综合化,目前,对小景观修剪主要使用各种人工操作的绿篱机,此类机器整备整机质量约5~10 kg,作业时操作方式为肩负手提,作业人员一直处于持重状态,设备不仅震动大,噪音也大,对环卫工人劳动强度的要求比较高,特别是对公路两边以及中央隔离带的修剪,修建维护人员工作场地潜在危险性很大,因此迫切需要研制一种移动式城市园林修剪及收集作机械来提高林业机械的自动化装备水平,而本次设计的目的,就是要解决这一系列问题。
1.2国内外研究现状分析
近几年,国内已有少量的高校和养护处研究小型车载树篱修剪机。如某公司生产了一种树木自动修剪机,其总体结构如图1.1所示。当伸缩臂和剪刀到达预定修剪位置时,汽车前行使可自动对绿化隔离带进行平面或立面修剪。该机节省了人力,在车辆穿行的公路上作业也很安全。但这种修剪机由自带发电机驱动,修剪部分为旋片式,臂架的伸缩由丝杠驱动,丝杠传动速度慢且承重能力差,不能灵活的多自由度修剪,而且旋片式修剪机抛洒到地面的枝叶比较严重[1]。
 图1.1 一种车载绿篱修剪装置
图1.1 一种车载绿篱修剪装置
在修剪技术方面,国外因为劳动力短缺但工业化发达的国情,会倾向于利用一些机械加工设备,开发出用于用于绿化修剪的相关设备,集成化、机械化水平比较高,并且事实也证明了投入之后取得了非常理想的效果,不但使得生产效率得到大幅的提高,同时又减轻了工人的劳动强度,并且改善了作业环境。
随着科学技术的进步和社会经济的发展,人们对生活环境的水平要求愈来愈高,环保问题引起了全球人类的广泛关注。用于修剪草坪、清扫园林垃圾、清扫积雪等的园林清理机械不仅是加速园林绿化事业发展的重要手段,而且也是保护环境、净化人类生存、空间不可缺少的一部分。但是,目前针对园林机械的研究还只是关注于机械技术性的设计领域,还没有涉及“人、机械、环境”三者之间关系的研究。园林工作者在使用园林机械的过程中,受到机械客观条件的限制,缺乏一定协调性和舒适性,这样导致机械工作效率降低、零部件损坏等情况产生,无形中增加了使用成本。本文选取园林机械中的“绿篱机”为研究对象,站在园林工作者的角度,将人机工程学、和逸性理念等理论引入其中,研究“人、机械、环境”三者之间的关系[2]。因此,园林清理实现机械化作业势在必行。当前我国园林清理机械主要存在的问题就是功能单一、质量性能不高、外形不美观且与环境不协调,传统的园林清理机械种类繁多,体型偏大,且四季不通用,年利用率不高,给储存维护带来很大不便。针对这些问题以及园林清理机械“小型为主,一机多用”的发展趋势,设计种小型的且具有多种清理功能的环境清理车,具有重要的现实意义与环保价值。文中综合分析小型多功能环境清理车的结构特点及适用场所,对整车及实现各个功能所需工作装置的总体方案进行设计。合理确定小型多功能环境清理车所需的技术参数,使更换过程更加快捷且具有人性化;分析各个工作装置的结构并对其主要零部件进行设计;运用软件完成各个零部件的三维建模,并对整机进行装配,检查干涉情况,然后应用有限元分析软件对滑移装置中的工作轴和修剪草坪所需的旋刀分别进行静力学分析和模态分析,验证设计的可行性和合理性;用运动算例功能完成滑移装置以及旋刀的运动仿真,使更换的过程更为直观地呈现出来;最后用软件对所设计的产品进行真实场景仿真,能够让人们对新产品的使用环境及使用过程一目了然,便于产品的推广使用。
笔者经过进一步的研究,提出一种操作简便、安全高效并且能对绿篱树木、景观苗木进行多种功能修剪和造型,并且能够对修剪后的枝叶进行收集的专用型手推式修剪机构设计方案。
1.3本课题主要研究内容
园林绿化修剪行业中修剪工作仍然使用大量的人工。由于作业环境差、劳动强度大,长时间劳作,不仅对工人身体健康造成极大危害,其产生的修剪残余物和噪音也对周边环境造成了极大的影响。绿化带修剪工作在城市以及园林中极为常见,工作量大,雇佣的工人多,纯人工修剪耗时费力,优势不多。针对以上问题,提出利用手推式城市绿化景观小树枝叶修剪车及收集装置进行改进并进行修剪工作的方案。
本装置研发成功后,将极大提高修剪质量与修剪效率、降低工人劳动强度。
完成的主要任务及要求包括以下几个方面:
(1)提出基于手推车(可电动助力)的修剪车及收集总体解决方案,并完成总体框架设计;
(2) 完成修剪装置设计,设计要求其具有高效性和较好的适应性、可调节性;
(3) 完成方位调节装置设计。设置合理自由度,能够完成平面、斜面、球面、波浪形的修剪功能;
(4)完成手推式城市绿化景观小树枝叶修剪车及收集装置的三维建模。并对修剪及方位调节装置系统运动进行仿真分析计算,并进行关键部位受力分析,进行强度校核。
1.4 课题研究方法
1.4.1分解课题研究目标,抓准研究切入点
通过本次毕业设计任务书,明确本次设计设计的要求与目的:要设计一款手推式城市绿化景观小树枝叶修剪车及收集装置。将本课题研究对象分解为几大部分,通过资料搜集与亲身实践测量,了解其工作情况与工作环境、工作特点与要求,后对应分别设计包括修剪装置,动力装置,收集装置,以及车架,控制系统和其他辅助装置,后根据每个部分要求单独设计,建模研究,选定标准,实现各部分功能,最后实施组装。
1.4.2 论文主要内容
包含手推式城市绿化景观小树枝叶修剪车的国内外研究现状,对应每个功能部分国内外主流设计模式,对比不同设计的优缺点,并且考虑到功耗、噪音、安全性等因素,分别对比,最后选定最佳方案,整合到本设计中,实现各个功能最佳设计设。说明书内容包括理论准备,相关资料搜集,国内外研究现状分析,各不同装置优缺点对比并敲定最佳方案,建模分析计算,进行受力分析与受力变形分析,运动仿真,最后形成完整装配体
总体设计,城市绿化景观小树枝叶修剪机器人与工业机器人比较具有明显的不同,工业机器人从事的作业大多是简单、重复作业,工作环境比较单一,侧重的技术指标是机器人的承载能力和精度;而城市绿化景观小树枝叶修剪机器人对精度要求不高,工作载荷也不大,主要的要求是工作空间、工作可靠性和环境适应性。考虑到操作人员的实际情况,同时希望结构简单、操作简便。
1.5 本章小结
通过本章,再次明确了设计方向和设计要求,结合背景与国内外发展现状,明确了研究内容,并初步拟定课题研究方法,罗列研究主线,为下面工作的展开打下了良好的为基础。
第2章 总体方案设计
全车模型共分为 大部分,分别是修剪装置、收集装置、方位调节装置、小车动力部分和车架,具体结构如下图所示。
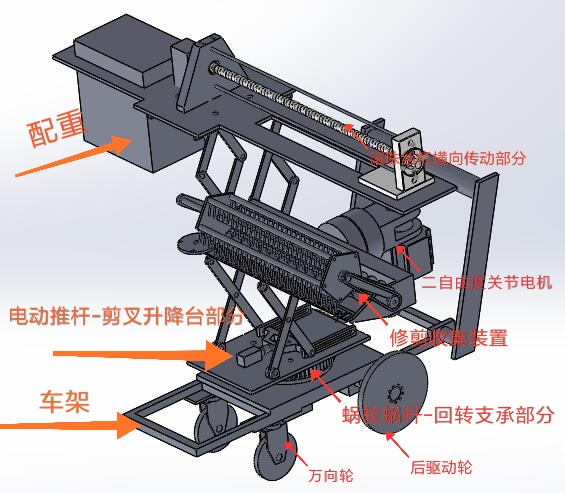
图2.1 修剪车及收集装置模型
- 修剪收集装置
修剪装置包括:耙禾器、割台、铲斗、轴式螺旋输送器,由电机带动割台上凸轮转动,通过连杆作用,使绿篱刀片实现往复运动,进而实现连续修剪;修剪过程中手推车不断往前运动,耙禾器不断将待修剪枝叶压入割台,使得修剪后的残余枝叶进入铲斗,铲斗内部设有斜坡,枝叶残余滑落铲斗底部,由轴式螺旋输送器通过转动,推移残余物至铲斗一边,后由重力作用落入收集装置,实现修剪和收集的目的。
在设计时,考虑到收集修剪后枝叶残余部分的目的,原因有两个:一是有的修剪装置由于自身设计结构的原因,没法实现残余枝叶的收集工作,导致残余枝叶大面积挥洒到路面上,影响环境卫生,并给市政以及环卫工作者造成不必要的麻烦;二是因为修剪后残余枝叶含大量生物质能,若收集后能加入到绿化植株根部,形成的大量腐殖质有利于绿化植物的生长。这些废弃枝条的利用比较少,主要用于农村燃料或堆肥使用,而相当多的残枝不可避免地被堆放在田边、路旁和宅院附近,极易造成严重的环境污染。 因此,研究一种果园修剪枝条处理机对实现枝条的综合利用具有重要的意义[12]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:





课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


