流道宽度对鲫鱼游泳运动行为的影响毕业论文
2020-04-06 13:14:05
摘 要
随着经济的快速发展,为满足发电、防洪和灌溉等需求,人们修建了众多的水利水电工程,对渔业资源的影响也日益显著。为了保护重要的渔业资源,人们修建了鱼道等设施。然而,不合理的设计会使鱼道失去其过鱼功能。如何设计符合鱼类生理特性和行为需求的鱼道结构,增强过鱼效果,成为鱼道设计中的难点。此外,模拟鱼类制造的水下航行器在人类探索海洋等过程中发挥了重要作用。深入探究不同来流条件下鱼的游泳运动规律,对于我们设计鱼道和仿生学的应用都具有重要意义。
本文通过逐帧分析各种来流条件下鲫鱼游泳运动过程的高速摄影视频和图像,统计了不同水流条件下鲫鱼运动的周期、振幅、波数等物理量。同时通过数值模拟软件,对鲫鱼在不同流场环境下游动时的流速场、涡量场、湍流强度分布和受力情况进行了计算,借此归纳总结流道宽度和来流速度等因素对鲫鱼运动模式和特征参数的影响规律,初步得出了鲫鱼对流道宽度等因素的响应规律,为鱼道设计和仿生学应用提供了一定的背景资料和理论依据。
关键词:鱼游,流道宽度,来流速度
Abstract
With the rapid development of economy, to meet the needs of electricity, a large number of water conservancy facilities have been built, hence, the impact on fisheries resources is becoming more pronounced. To protect fishery resources, people have built fishway and other facilities. However, unreasonable designcould make the fishway out of function.How to design a fishway that fits the physiological characteristics and behavioral requirements of fishto make more fish get through becomes a difficult point. Furthermore, underwater robots that simulate fish play an important role in human’s exploration of the sea. Deep exploration of the law of fish movementis important for us to design fishway and bionics application.
Through frame-by-frame analysis of high-speed videotapes of fish movement, we counted the fish's physical quantities such as period, wave number and amplitude under different flow conditions, and calculatesthe velocity field, vortex field, turbulence intensity distribution and stress of crucian crap swimming in different flow fields through the numerical simulation software, thus the influence of the width of flow path and inflow velocity on fish motion are generalized. Fish’s responds to the width of flow path and inflow velocity was concluded preliminarily. It could provide some background data and theoretical basis for the design of fishway and the application of bionics.
Key Words:fish swimming, width of flow path, flow velocity
目 录
第1章 绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 2
1.3 本文所做的工作 3
第2章 研究方法 4
2.1 实验设置 4
2.2 数据分析 5
2.2.1 鱼体运动方程的提出 5
2.2.2 鱼体摆动周期统计 5
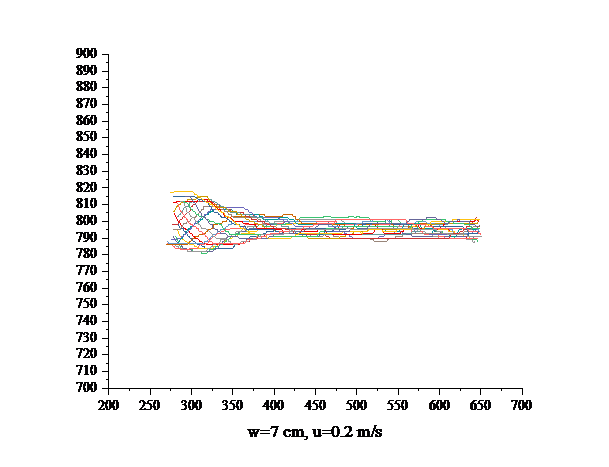
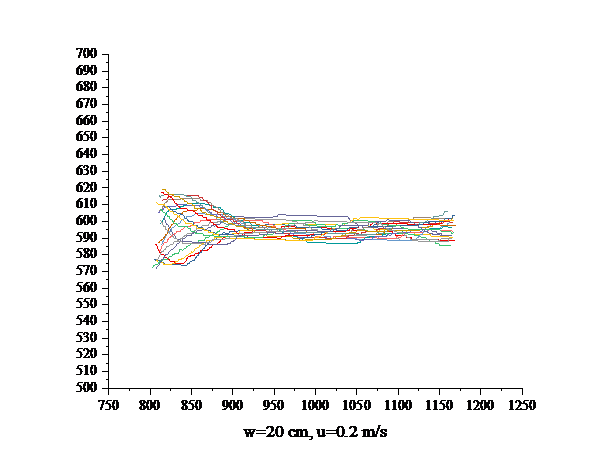
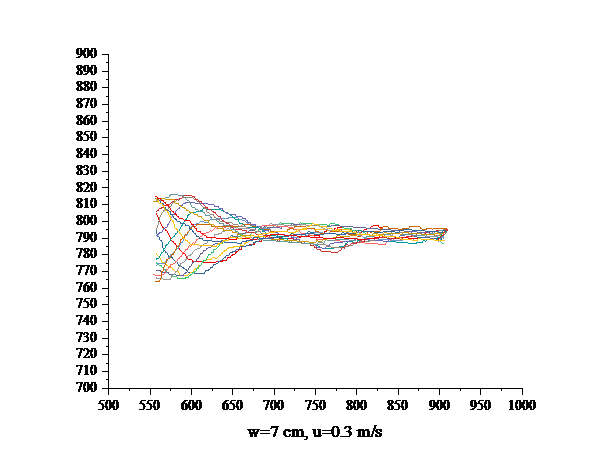
2.2.3 鱼体体干曲线提取 7
2.2.4 鱼体各部位运动轨迹计算 7
2.2.5 数据修正和转换 8
2.3 流场数值模拟方法 8
2.3.1 软件简介 8
2.3.2 模型建立 9
第3章 实验数据分析结果 10
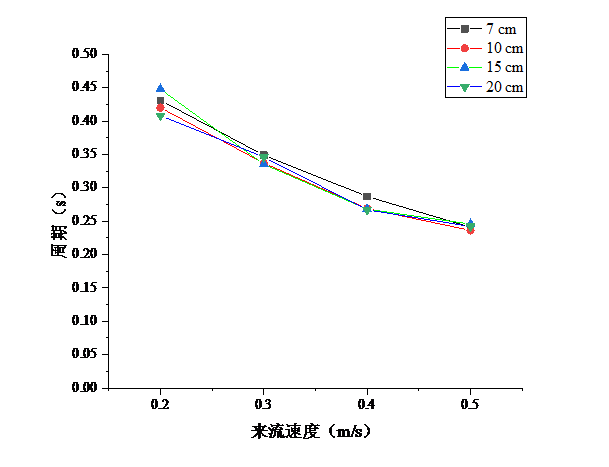
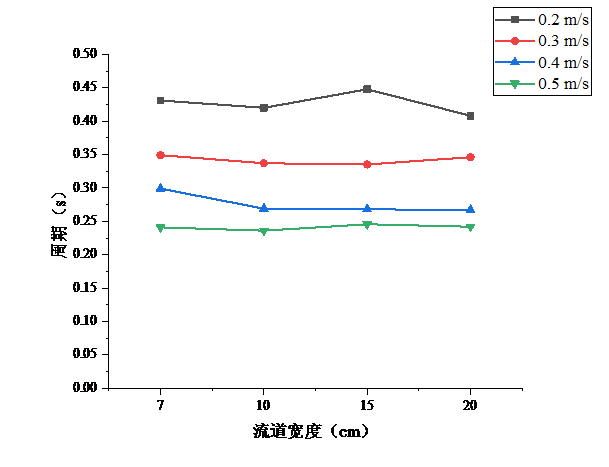
3.1 鱼体摆动周期 10
3.2 鱼体摆动振幅 12
3.3 体波数和初相位计算 15
3.4 总结 22
第4章 流场分析结果 24
4.1 计算参数的确定 24
4.2 计算步骤 24
4.2.1 建模和材料属性 24
4.2.2 边界条件和网格划分 25
4.2.3 时间步长设置和计算 25
4.3 结果分析 26
4.3.1 流速 26
4.3.2 阻力系数 28
4.3.3 压力 30
4.3.4 其他属性 31
第5章 结论及展望 36
参考文献 37
致 谢 38
第1章 绪论
1.1 研究背景与意义
工业革命以来,人类的生产力获得巨大提高,同时对自然地貌的改变也越来越大,原有环境中生物的生活也随之受到了影响。例如,人类出于发电、蓄洪、灌溉等目的,修建了大量的水利设施。在满足人类需求的同时,也极大地改变了河流的水文条件,阻断了河流中某些具有洄游特性的鱼类进行迁徙和繁衍的道路。洄游之路被阻隔的鱼类短时间内难以调整其生理习性来适应新的生存环境,这使得它们的生存受到了严重的威胁。生态环境中的生物不是孤立存在的,一个物种消减甚至于灭绝,会引起一系列连锁反应。作为水生态环境中重要的组成部分,鱼类的生存危机会严重影响整个生态系统的稳定。不仅如此,鱼类也是人类重要的食物来源和部分工业产品的原料之一,某些鱼类如中华鲟还具有重要的科学研究价值。
因此,无论是出于资源维护和环境保护的角度,还是从科学研究的角度来看,人类必须采取相关的措施保证鱼类的生存,为其繁衍设置新的洄游通道。目前普遍的做法是修建专门的鱼道设施,或使用升鱼机,或者采用增殖放流等人为手段。这些设施和手段起到了一定的作用,然而,以鱼道为例,人类设计的鱼道与鱼类长期生存的自然环境仍然存在着一定的差异,鱼道设施中的一些不合理结构,会导致鱼无法顺利地通过鱼道,而使鱼道成为摆设[1]。例如,若通道内水流的流速过大,超过了鱼的能力范围,它就无法顺利从下游游动到上流产卵。又或者通道内产生了某些特殊漩涡,影响了鱼的运动或者干扰了鱼对水流条件的感应,导致鱼迷失而停止前进。另外,由于水坝拦截了河流,导致鱼道的上下游存在较大的落差,通常需要设置各种样式的隔板来改变水流条件,减缓水流动能,减轻鱼逆流而上的压力,随之而来的是流场的结构变得极为复杂,造成了新的问题,可能会导致鱼道失效。科学合理地设置鱼道,使鱼能够正常的通过鱼道迁徙、繁衍,需要对鱼类的生理特性、行为习性和游泳能力等进行深入的研究,以揭示鱼对复杂流场环境的响应规律,从而科学地指导我们设计符合鱼生理特性的鱼道设施。
不仅出于生态保护的目的,从仿生学角度,人类从鱼类的身上也可以得到许多灵感。人类对水下世界的探索和开发日渐深入,然而人类的身体结构并不适应长时间水下作业,通常需要借助某些水下航行器。目前现有的水下航行器的行动能力和运动效率较低,这大大限制了人类对江河湖泊以及海洋的探索。作为水生生物的鱼类,游泳是其最主要的生命活动之一,对鱼类的捕食、洄游、聚集、避害和繁殖等活动具有极其重要的意义,游泳可以说是鱼类的本能。作为自然界中最早出现的真骨类脊椎动物之一,亿万年的自然选择使鱼类进化出了极为优越的水中行动能力。其外形极为适应水中行动,其游泳模式也使得其水中行动异常灵活高效。例如,梭子鱼(又名海狼鱼)在掠取食物时,其加速度可以甚至可以达到重力加速度的十几倍[2]。鱼类的机动性能也十分出众,人类所制造的普通舰船,转向时通常需要几倍于船长的回转半径,且转向速度较慢。而鱼类转向时,回转半径仅为其体长的百分之十到百分之三十左右,且转向极为迅速。传统的螺旋桨在推动时[3],其侧面会产生涡流,这大大降低了推动的效率和推动的速度,并且在工作时会产生非常强烈的噪声,而鱼类在游动时则十分安静[4],这些优良的特性非常具有吸引力。目前常见的和鱼大小相似的微型水下机器人,其在水中作业时,其速度普遍也只有几公里每小时。对于船舶等大型设备,也可以通过研究鱼类的运动模式,对部分结构进行改进以提高效率。
鱼类高效的游泳能力与其特殊的身体构造是分不开的,例如鱼类通过使用其尾鳍来整合背后的涡流,使其产生平行于前进方向的喷流。通过控制涡流,鱼得以快速起动。而常规船用螺旋桨产生的喷流与船的前进方向垂直,推力很难被有效利用。这可以对我们设计和改良螺旋桨等推进装置提供一种思路。综上所述,鱼类快速启动和转向时的高机动性和敏捷性,是目前人类所制造的水下航行器难以比拟的。可以通过学习鱼类特殊的身体结构和巧妙的运动模式,制造高效灵活的水下航行器,制造出高效率的水下机器人,加速人类对海洋的探索和利用。
综上所述,研究鱼类对于人类进行环境保护和资源可持续性利用,以及促进仿生学应用等都具有极为重要的意义。目前我国在鱼道设计和仿生鱼机器人等领域较国外稍显落后[5],作为极有科学研究和生产应用价值的课题,需要对鱼类行为进行深入研究。深入研究鱼类,有助于实施可持续发展战略,有助于制造性能更为优越的水下航行器。
1.2 国内外研究现状
由于渔业生产的需要,鱼类行为学的研究日渐增多。1973年K·洛伦兹、K·冯·符瑞西和延伯根等人获得诺贝尔生理学医学奖后,更是加速了鱼类行为学领域的研究,众多科研成果涌现出来[6],大大加深了人们对鱼类的了解程度。早在1975年,Lighthill[7]就提出了描述鱼游运动的公式。本世纪相关的研究工作也有很多,齐亮等[8]研究了鱼类感知水流特征的器官及其作用机理,讨论了水流速度、压力和紊动等多种水力因素对鱼类游泳行为的影响。袁喜等[9]研究了游泳速度对鲫鱼的游泳行为和能量消耗之间的关系,得出了鲫鱼摆尾频率、摆尾幅度和它在游泳时所消耗的能量随游泳速度的变化规律。周萌等[10]精确测量了鲫鱼的材料参数、躯干形态和肌电信号等特性,归纳总结了鲫鱼的几何形貌特征和质量分布函数。
鱼的运动模式可分为巡游和机动两种,根据鱼体弯曲的形状,起动还可细分为S形起动和C形起动[11]。目前大多数研究集中于鱼的巡游,通过分析高速摄像,敬军等[2]研究了鲫鱼的C形快速起动,对鲫鱼快速启动的力学机理进行了探讨。吴燕峰等[12]研究了斑马鱼S形起动的运动过程。影响鱼类游泳速度的因素可大致分为生理和环境两种,不同鱼类对这些因素的响应得到了较好的研究和总结[1],其结论广泛应用在鱼道设计中。柯森繁等[13]针对过鱼设施中的关键问题——鱼的顶流游泳行为进行了研究,结果表明摆尾频率与相对摆尾振幅的相关性不高。
传统的鱼的运动学研究大多为实验观测,通过使用高速摄像机等来获取鱼的运动图像,或是借助粒子成像测速仪来获取流体流动信息。通过这些技术获得的数据可以用来分析鱼的运动,但是难以用于分析鱼体和周围流场的相互作用及其动力学过程。近年来,随着计算机运算能力的提高和计算流体力学(CFD)理论的发展,越来越多多的学者开始借助CFD技术来对鱼游动时周围的流场、压力场等进行模拟分析。大量的研究成果弥补了理论研究和实验不足。从文超等[14]用使用NACA0012翼型模拟鱼类,用SST k-ω模型对鱼类的波状摆动运动进行了数值模拟,研究了斯特哈尔数、波长和滑移率等因素对全鱼推进性能的影响。常兴华[15]等研究了鱼类月牙尾运动模式,使用数值模拟技术分析对比了在层流和多种湍流模型下,雷诺数对该运动模式的影响。研究表明高雷诺数情况下的游动,鱼体背风面的流动分离现象因湍流流动而受到了一定程度的抑制,使得这个模式下巡游的性能得到提高。龚万阳等人[16]对鱼类运动进行建模,使用仿真模拟技术研究了鲫鱼的推进效率和流速之间的关系,并提出了推进效率最高时的流速。
CFD技术也加速了仿生学的研究,研究人员利用该技术对机器鱼模型进行验证,论证其外形和运动参数以及流体对其推进性能和效率的影响,大大减轻了仿生鱼优化设计的工作量。上世纪九十年代已经有仿生鱼样机出现,并且伴随着技术的成熟,机器鱼能模拟的鱼类推进模式越来越多。将鱼类的运动按照其时间特性可分为中央鳍/对鳍模式(简称为MPF)与身体/尾鳍模式(简称为BCF)两类[3]。早期的仿生机器鱼多为BCF推进模式,近年来,MPF模式因其高机动性和高稳定性得到了越来越多的关注。
1.3 本文所做的工作
本课题属于鱼类游泳行为研究的范畴,研究鲫鱼在不同宽度的流道中游动时的行为特征,归纳总结了流道宽度和来流速度等因素对鱼体摆动频率、振幅和身体变形行为的影响规律,探究鱼类对变化的流场(不同的流道宽度和来流速度)的运动响应,以期为鱼类资源保护和鱼类仿生学应用提供理论基础和科技支撑。
第2章 研究方法
2.1 实验设置
本文所研究的对象为鲫鱼,是一种常见的淡水鱼,广泛分布于欧亚大陆。它是主食植物的杂食性鱼,无毒,喜群居,在我国除西藏以外均有分布,多产于长江、黄河和珠江流域,是一种非常典型的经济型食用鱼类。
实验所用的鱼来自于本地市场,其体长范围为18~20 cm(体长定义见),质量范围为180~200g,因此可以近似忽略鱼的差异对实验结果的影响。实验前将鱼置于水池内饲养一周,所用的水池长约2.4m,宽约1.8m,池内的水深维持在0.6m左右。饲养期间,每日换水量不少于30%。使用充氧泵保持水体溶氧浓度不低于7.4mg/L,池内水温维持在 。每日定时给鱼投食1次并清除饲料残渣和鱼类粪便。
。每日定时给鱼投食1次并清除饲料残渣和鱼类粪便。
|
实验设备简图 |
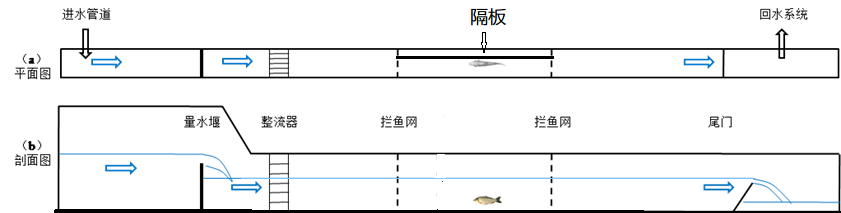
实验在所示的自循环型水槽中进行,该水槽为平底等宽玻璃水槽。由其构成的流道长16m、宽0.6m、深1.2m。整个流道较长,为了限制鱼的游动范围,设置两个拦鱼网。两拦鱼网之间的间距约为3m。上游通过量水堰测量来流流量,下游通过可控尾门来改变水深。经测试,水槽平稳运行时的最大流量约为180L/s,则水深0.5m处的断面其最大平均流速为0.6 m/s。根据现有研究成果[9],体长12~20 cm的鲫鱼,其相对极限游泳速度为 。对本实验所用的鲫鱼,用体长20 cm作代表,可推算其极限游泳速度为
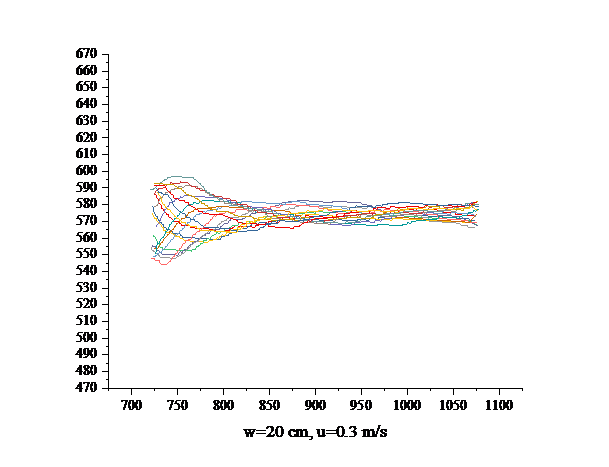
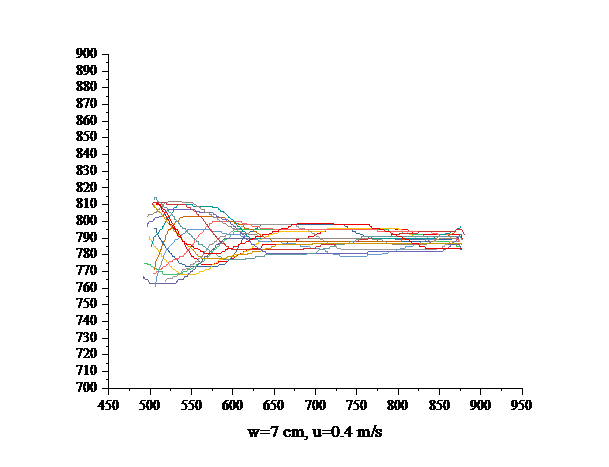
。对本实验所用的鲫鱼,用体长20 cm作代表,可推算其极限游泳速度为 ,因此本实验进行的最大流速为0.5 m/s,最终进行实验的来流速度为0.2 m/s、0.3 m/s、0.4 m/s和0.5 m/s四种。作为生物体的鱼,其速度难以人为操控,然而来流速度是可以人为控制的。当鱼沿来流速度方向没有运动时,其相对游泳速度的大小即为来流速度。因此,采集数据时,要求鱼在沿来流方向没有明显的位移。实验中用所示的隔板隔出不同的流道宽度来研究宽度对鱼运动的影响,实验时使用隔板隔出了7 cm、10 cm、15 cm和20 cm等四种宽度。
,因此本实验进行的最大流速为0.5 m/s,最终进行实验的来流速度为0.2 m/s、0.3 m/s、0.4 m/s和0.5 m/s四种。作为生物体的鱼,其速度难以人为操控,然而来流速度是可以人为控制的。当鱼沿来流速度方向没有运动时,其相对游泳速度的大小即为来流速度。因此,采集数据时,要求鱼在沿来流方向没有明显的位移。实验中用所示的隔板隔出不同的流道宽度来研究宽度对鱼运动的影响,实验时使用隔板隔出了7 cm、10 cm、15 cm和20 cm等四种宽度。
用高速摄像机以50帧/秒的速度对鱼的运动过程进行记录,然后使用imagepro软件从拍摄的视频对鱼的运动进行定性分析和运动数据提取。
2.2 数据分析
2.2.1 鱼体运动方程的提出
|
实验用鱼及其体长(L)和鱼体中心(BC)定义 |
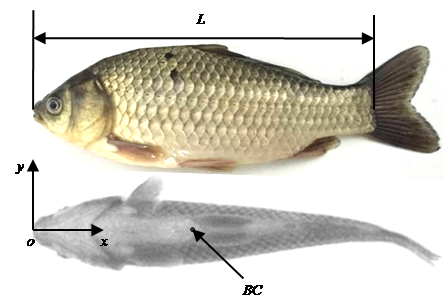
如所示,鱼的体长L定义为从鱼的吻端到鱼的尾鳍基部(即尾柄)的直线长度(不含尾鳍)。由前人对于形态和质量分布的研究成果[10],将鲫鱼以的方式摆放时,其质心位于距吻端0.472L处,即中的BC。使用中的坐标系,在观察鱼的运动视频中,可以发现以下特征:(1)鱼沿y轴做往复运动;(2)尾部的运动幅度比躯干的更大;(3)x坐标不同的位置,其运动是不同步的。
依据现有研究成果[17],鱼的这种波状摆动的关键特征有:(1)进行这种运动的身体的长度;(2)运动的频率;(3)运动的振幅;(4)推进波的长度。对于本文研究的对象——鲫鱼,虽然其躯干前半部分运动幅度不大,但仍然在进行摆动,因此,认为鱼的整个身体都在运动。记运动的角频率为 ,体波数为
,体波数为 ,鱼的振幅为
,鱼的振幅为 于是,鱼的运动可以描述为:
于是,鱼的运动可以描述为:

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


