Baxter双臂机器人动力学控制研究毕业论文
2020-04-07 14:09:28
摘 要
协作机器人,是一种在协作空间内能与人进行近距离互动、帮助人们工作的机器人。相比传统工业机器人,具有着部署成本低、灵活度好、安全系数高的优点,协作机器人的出现迎合了当前许多中小企业的市场需求,是目前的机器人研究的热点方向。
本文在基座固定的前提下,以Baxter机器人七自由度冗余机械臂为研究对象,采用理论研究与实验验证相结合的研究方式,系统地研究了机械臂的运动学建模、正运动学求解及基于臂形角参数化方法的逆运动学解算问题,旨在为七自由度冗余机械臂的控制提供有效的理论基础,为后续轨迹研究做铺垫
本文的具体研究与工作内容包括:
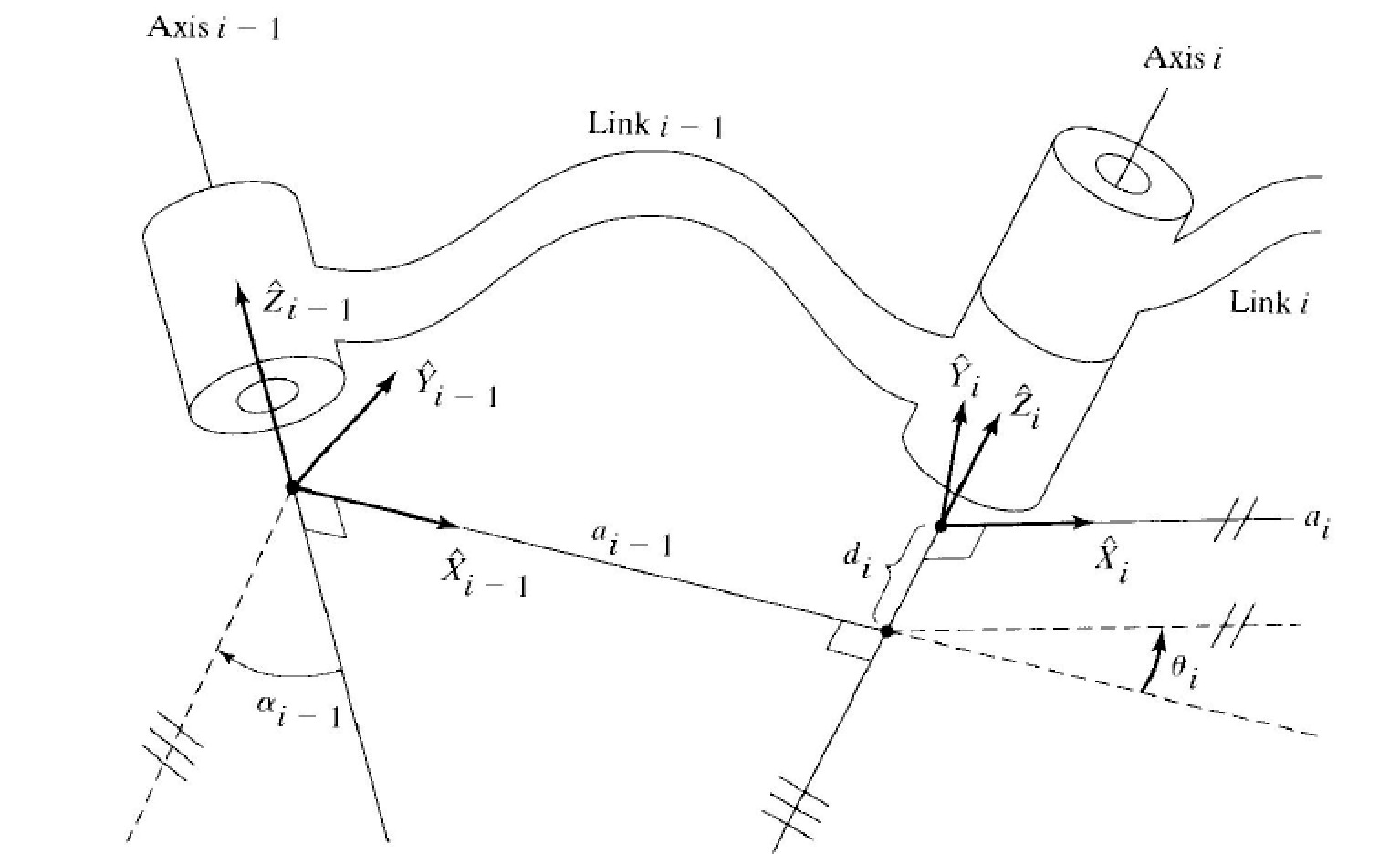
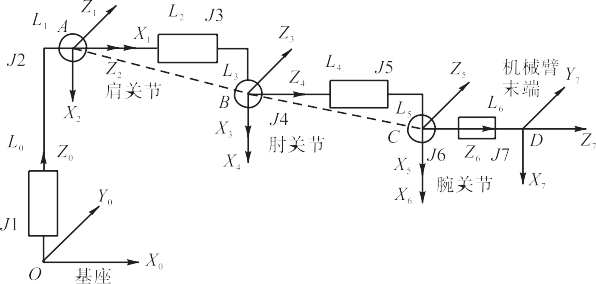
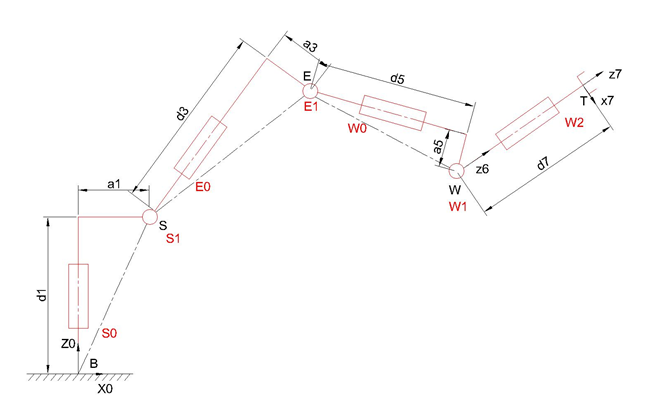
(1)针对本文研究的Baxter机械臂,基于D-H法对其进行运动学建模,并结合机器人URDF文件总结其D-H运动参数,建立Baxter机器人机械左臂的连杆参数模型;
(2)进行正运动学解算。根据所列出机械臂运动学模型及相对应运动学参数,列出其各相邻连杆的齐次坐标变换矩阵,依次相乘得到其正运动学解算矩阵,并用欧拉角进行描述;
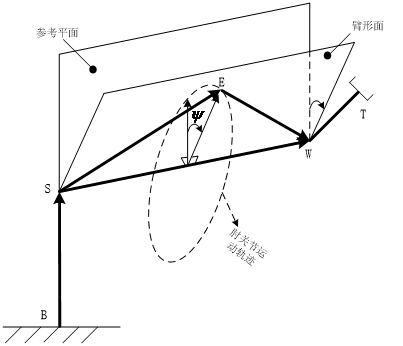
(3)针对Baxter冗余机械臂构型,采用基于臂形角参数化的方法来求解冗余机械臂的逆运动学,以臂形角来参数化除轴关节之外的其余关节,推导Baxter机械臂的逆运动学方程;
(4)通过仿真软件对所得正逆解算法进行仿真分析和验证,再对实际的运动控制数据进行采集,对关节及末端的规划轨迹进行对比分析,验证研究所得正逆解算法的正确性和准确性。
关键词: 协作机器人;七自由度冗余机械臂;参数化逆运动学;臂形角。
Abstract
Cooperative robots are robots that can interact with people in a collaborative space and help people work. Compared with traditional industrial robots, it has the advantages of low deployment cost, good flexibility, and high safety factor. The emergence of collaborative robots meets the market demands of many small and medium-sized enterprises and is currently the hotspot of robot research.
In this paper, under the premise of a fixed base, the Baxter robot's seven-degree-of-freedom redundant manipulator is taken as the research object, and the research method combining theoretical research and experimental verification is adopted. The kinematics modeling and positive kinematics of the manipulator are systematically studied. Solution and inverse kinematics solver based on the arm angle parameterization method is designed to provide an effective theoretical basis for the control of a 7-DOF redundant manipulator and to pave the way for follow-up trajectory research.
The specific research and work of this article include:
(1) Based on the D-H method, the Baxter robotic arm studied in this paper was kinematically modeled, and combined with the robot URDF file to summarize its D-H motion parameters, and the link parameter model of the left arm of the Baxter robot was established.
(2) Perform positive kinematics solution. According to the kinematics model and corresponding kinematics parameters of the manipulators listed, the homogeneous coordinate transformation matrix of each adjacent link is listed, and the positive kinematics solution matrix is obtained by successive multiplication. The Euler angles are used to describe the kinematics model.
(3) For the Baxter redundant manipulator configuration, the arm-angle parameterization method is used to solve the inverse kinematics of the redundant manipulator, and the arm joint angle is used to parameterize the rest of the joints except for the shaft joint. Baxter is derived. The inverse kinematics equation of the robotic arm;
(4) The simulation and analysis of the obtained forward inverse algorithm are performed by simulation software. Then the actual motion control data is collected, and the planned trajectory of the joint and the tip are compared and analyzed to verify the correctness of the forward inverse solution algorithm. accuracy.
Keywords: cooperative robot; redundant robot with seven degrees of freedom; parametric inverse kinematics; arm angle.
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1课题来源和研究意义 1
1.1.1课题来源及背景 1
1.1.2研究意义 2
1.2国内外研究现状 2
1.2.1机械臂国内研究现状 2
1.2.2机械臂国外研究现状 5
1.2.3七自由度冗余机械臂逆解 8
1.3本文主要工作 9
第2章 双臂机器人运动建模 10
2.1双臂机器人结构 10
2.2双臂机器人运动模型 11
第3章 Baxter机器人的正运动学分析 15
3.1齐次变换矩阵 15
3.2正运动学求解 15
第4章 Baxter冗余机械臂逆运动学求解方法研究 19
4.1 肘关节求解 20
4.2 肩部关节求解 21
4.3 腕部关节求解 25
第5章 参数化运动学仿真 28
5.1固定位置的运动学求解 28
5.2连续轨迹的运动学求解 28
第6章 结论与展望 30
6.1研究结论 30
6.2未来展望 30
参考文献 32
致谢 34
附件 35
第1章 绪论
1.1课题来源和研究意义
1.1.1课题来源及背景
机器人是一种能够对其进行编程并在自动控制下执行特定操作和移动作业任务的机械装置【1】。机器人设计是21世纪一项重要的研究方向,涉及的学科有传感器技术、自动控制技术、计算机技术、通信技术、人工智能【2】、仿生学等诸多学科,机器人技术研究对我国重工业、制造业等各大基础行业均有很大帮助;而机器人研究和应用水平是反映一个国家工业自动化水平的重要标志。机器人从诞生到现在,随着计算机技术、传感器技术等的高速发展,世界上各种先进机器人系统有了跨越式的进步,如智能机器人和协作机器人。
协作机器人是一种在设计的初期就考虑降低伤害风险提高安全性,从而能够直接与人类进行交互(Direct Interaction)/接触(Physical Contact)的机器人,其也是当前许多机器人公司的研究热点。传统工业机器人在工作时,受限于技术和需求原因,为保证安全需要采取措施把人类排除在工作区域之外,例如汽车厂的焊接,喷漆等工序完全不需要人的参与,因此用安全围栏/光栅围住即可。传统工业生产线固定且规模大,而新兴工业变化快且生产线多,对于这些新兴产业,传统工业机器人便很难再满足产业需求。3C(Computer、Communication和Consumer Electronics)产业是这个方面的典型代表。3C市场中主流产品的更新换代的速度可谓日新月异,这便需要机器人生产线具有较低的投入、柔性的部署、方便调试并具有足够安全的人机协作空间。协作机器人的出现恰好迎合了这些企业的市场需求,在生产线中协作机器人将机器人精准的重复性能和和人类独特的技巧能力结合起来,人类解决不精确/模糊的问题,而机器人则在精度、力量和耐久性上出力,并实现实际生产中较高程度的自动化。
协作机器人的目标操作作业通常通过机械臂来实现,因此手臂机构设计是协作机器人研发的关键技术。常见的拟人机械臂(如PUMA560)多为六自由度机械臂,六个自由度的存在使机械臂可以完成任一空间作业。但六自由度机械臂的自由度数目和末端位姿参数数目相同,在末端位姿固定的状态下,只有有限的关节位置与其对应。当机械臂周围存在障碍或者处于奇异位置时,机械臂只可以进行有限的调整。冗余机械臂是指具有六个自由度以上的机械臂,而由于机械臂自由度数目大于末端位姿参数数目,关节空间存在着无数组解与目标末端位姿对应。采用具有冗余特性的机械臂相比于非冗余机械臂,有着许多优点和特性。冗余机械臂能够增加工作空间的灵活性和实用性【3】,还可以实现避障【4】、容错【5】和关节力矩优化【6】等功能。常见冗余机械臂机器人有德国DLR研制的Justin机器人、日本川田工业研制的Nextage机器人以及美国Rethink Robotics公司研制的Baxter机器人等,本文选取基于Baxter拟人双臂机器人进行冗余机械臂运动学研究,而为后续运动学控制做铺垫。
1.1.2研究意义
机械臂作为协作机器人目标操作作业的主要执行机构,除了要保证其功能的完整性和控制系统的稳定性外,由于工作环境的特殊性,需要对机器人的仿人手臂进行研究。机器人运动学是机器人位姿控制的基础,研究机器人运动学正反解,可以确保机械臂在控制过程中位置和姿态的精准性。
Baxter拟人双臂机器人的两条机械臂均采用七自由度冗余串联结构,在单臂进行独立操作的同时,还可以双臂协同完成复杂任务,具有较高的灵活性和可靠度。论文以Baxter拟人双臂机器人作为研究对象,围绕其机械臂左臂建立D-H坐标系并列出其D-H参数表,进行正运动学求解;而对于逆运动学的求解,由于机械臂冗余关节的存在,使得在固定的末端位姿下,可以存在无数组关节角组合来达到目标位姿。在机械存在冗余性的情况下如何确定合适的解是个难点问题。本文打算从冗余关节参数化入手,再基于冗余关节推导整条机械臂的逆运动学方程,最终解决由冗余自由度带来的逆运动学多解的问题。拟人机械臂的正逆运动学求解是开展相关研究的基础和首要任务,因此开对本课题的研究具有重要意义。
1.2国内外研究现状
1.2.1机械臂国内研究现状
我国的双臂机器人仍处于战略决策及预研阶段,存在着核心技术缺失,产业结构不完整等问题,主要依靠模仿国外已有技术及模型,实际生产和应用中几乎一片空白。但随着我国从中国制造向中国智造的转变,双臂协作机器人作为智能制造的主力军,国家投入了大量经费并加强产业设计,许多高校及科研院所也正在积极开展相关方面的研究和创新,在学习国外双臂机器人成熟技术的同时,寻求这一领域新的突破。
东南大学远程测控实验室【7】在国家项目及基金的扶持下,一直致力机器人传感和控制技术的研究,并取得了一定成果。于2015年搭建了第一代轻型机械臂,如图1.1(a)所示,该七自由度机械臂主要面向空间舱内作业,臂长达到了1045.98mm。2016年,该实验室研发了第二代轻型空间机械臂,如图1.1(b)所示,臂长可达到1133.5mm,臂杆采用了碳纤维管材料,刚度强,重量轻,机械臂自重仅为25.226kg。为了提高机械臂的自重比,两代机器人的内部都采用了谐波减速器作为传动装置。
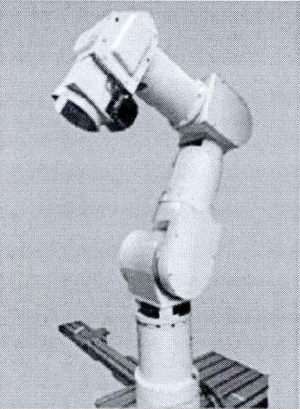

(a) (b)
图1.1 第一代和第二代轻型机械臂
哈尔滨工业大学的黎田团队设计研发了一套六自由度仿人机械臂【8】,如图1.2所示。机械臂六个关节均采用内部走线的结构模式,具有质量轻、传动比大、关节集成度高、定位精度高等优点。机械臂自主设计的过程主要包括对机械系统、传感系统以及电气系统的研发创新。具体地,该团队从对机械臂关节灵活度、末端负载能力以及逆运动学解算精度的需求分析入手。首先确定机械臂的自由度数及关节构型,再根据机械臂各关节位置及负载的不同,基于局部模块化的设计思想求导机械臂各关节的具体设计,最后通过电气连接将各个关节串联起来。该团队为了便于拆装维护,自主设计了基于弹簧插针的关节电气连接。
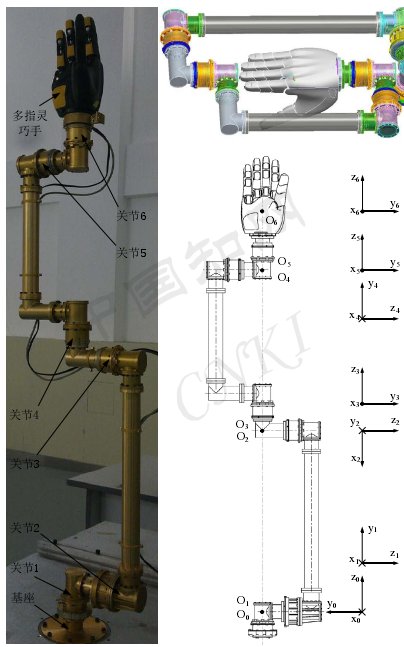
图1.2 六自由度柔性关节机械臂系统
北京遨博智能科技有限公司早年就推出了一款OUR-i5协作型机械臂,如图所示,该型机械臂主要针对教育行业设计,拥有高度安全和强大的开源平台。OUR机械臂作为一款六自由度协作机械臂,跟传统工业机械臂有很大区别,其体积小、重量轻,工作时能达到较快的运动速度和较大的活动范围,机械臂的最大运动速度可以达到180°/s,在处理更复杂、更危险的工作,具有更佳的灵活度、精确度和安全性。
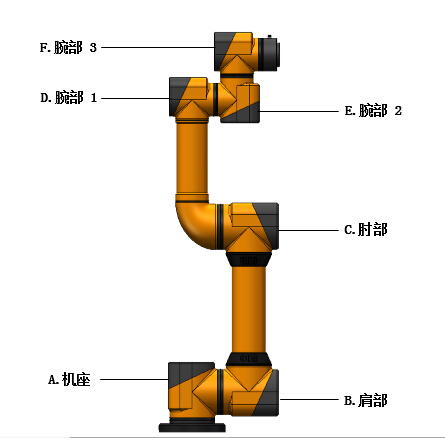
图1.3 OUR协作型机械臂
沈阳新松机器人有限公司是国内著名的机器人生产企业,其在2015年推出新松臂协作机器人是我国首台人机协作机器人,如图1.4所示。新松协作机器人每条柔性机械臂均具有七个自由度,机器人头部配备有可动双目视觉系统,具有灵活性高、安全性好、操作简单等特点。其机械臂可以感知末端力大小,在运动过程中触碰到物体能够灵敏的检测到,并迅速停止运动。可以保证人机协作工况下人的安全性,同时避免了对环境中物体的破坏。新松机器人在其800mm的工作范围内,重复定位精度高达0.02mm,且其奇数关节运动范围为±180°,第5、6、7三个关节的运动速度可达180°/s。该机械人作为国内首台人机协作机器人,具有极高的灵敏度、灵活度、精确度和安全性,打开了国内人机协作机械臂生产制造产业的空白,引领了国内协作机器人的研究发展方向。

图1.4 新松双臂机器人
1.2.2机械臂国外研究现状
国外关于双臂协作机器人的研究工作已经展开已久,并取得了相当卓越的成果,尤其是以美国、德国、瑞士等为代表的发达国家,协作机器人的研发一直是热点前沿问题。协作机器人将机器人的精确重复定位能力和人类独特的技巧与柔性处理能力结合起来,在保证人类安全的情况下实现人机协作,达到较高程度的工业自动化,它的出现大大改善人类的工作和生活品 质,并推动社会的进步和发展。
2015年的东京国际机器人展会上,德国KUKA机器人公司推出了一款新型轻量级机械臂,LBR-iiwa的构型如图1.5所示。该机械臂具有七个自由度,臂型边缘柔顺、角度缓斜,符合人机工程学。LBR-iiwa机械臂【9】的负载质量可达到14kg,单臂自身重量仅24.5kg,具有相当高的负载自重比,其末端定位精度可达0.1mm,重复定位精度小于0.35mm,在具有着高灵敏度及精准性的同时机械性能和控制效果也表现优异,是一款主要面向工业生产应用的轻型协作机器人。具体来看,机械臂铝制外罩可轻松容纳电机、齿轮单元、制动器、传感器、关节控制器。而具有高性能伺服控制性能的机械臂每个关节内都集成了扭矩传感器,能够在力控制下快速检测物体轮廓。当机械臂与物体产生接触时,它能够立即降低力和速度。力位混合的控制模式使它能够进行精细操作而不会对操作对象产生破坏,具有相当的安全性。
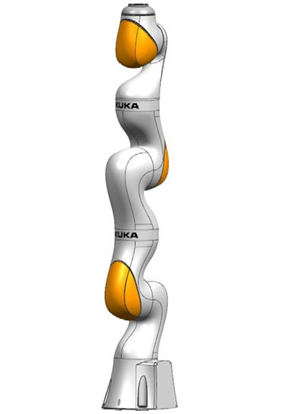
图1.5 LBR-iiwa轻量级机械手
Schunk是由德国雄克公司生产的一款冗余度轻型机械臂【10】,机械臂具有7个旋转自由度,相邻关节的轴线在同一平面内且相互垂直。机械臂关节采用模块化设计,集成度高,每个关节有直流无刷电机、失电制动器、谐波减速器、关节控制器和传感器组成,结构采用中空设计,方便走线。机械臂各零件材料均采用 硬质铝合金制造,表面阳极氧化为灰色。关节可360°旋转,转动的速度最快可达70°/s。机械臂单臂重20kg,末端负载最大可达5kg,机械臂重复定位精度为±lmm。而为了确保在未知环境以及人机协作工况下的安全性,机械臂每个关节内部都集成了力矩传感器,具备感知外界环境的能力。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


