无人驾驶城市道路场景三维虚拟构建毕业论文
2020-04-08 13:28:01
摘 要
2(2018.3.5~ 2018.3.9)
分组进行开题讨论,修改开题报告;提交实习日记及实习报告。
3~5(2018.3.12~ 2018.3.30)
完成并提交外文翻译译文、文献检索摘要、文献综述及开题报告。
6~10(2018.4.2~2018.5.4)
撰写论文,提交中期审查报告。
11~13(2018.5.7~2018.5.25)
论文修改,网上查重,审查通过并打印,提交所有毕业论文资料。
14~15(2018.5.28~2018.6.8)
学生提出答辩申请,并作答辩准备;教师审阅论文,并审查答辩资格。
16(2018.6.11~2018.6.15)
参加答辩
(四) 必读参考文献:
1、刘少山,唐浩等, 第一本无人驾驶技术书,电子工业出版社
2、中国学术期刊网(www.cnki.net.cn)上《机械工程学报》、《中国机械工程》、《计算机集成制造系统-CIMS》等中文期刊;
3、ScienceDirect(http://www.sciencedirect.com)上International Journal of Advanced Manufacturing Technology;European Journal of Operational Research等外文期刊;
指导教师签名: 吴婧 2017 年 12 月 19 日
系主任签名: 蔡永华 2017 年 12 月 28 日
院长签名(章):  2017 年 12 月 28 日
2017 年 12 月 28 日
摘要
作为未来汽车的发展方向,无人驾驶已经引起社会各界广泛关注。无人驾驶关键技术的发展在无人驾驶的持续发展中发挥了重要作用。本文回顾与总结了无人驾驶技术的发展以及城市道路的建设,并对该项技术现如今所面临的难点与问题进行了分析与探讨。无人驾驶技术是未来汽车发展的必然方向,对降低驾驶员的驾驶强度和驾驶安全性具有重要意义。基本内容为:
(1)介绍了无人驾驶技术在国内外的发展情况,以及一些城市道路构建的基本情况
(2)简单介绍所使用的建模软件3Ds max以及场景构建软件Unity 3D,并按照场景构建原则,提出了场景构建的总体框架结构,并确定了总体解决方案与场景构建流程
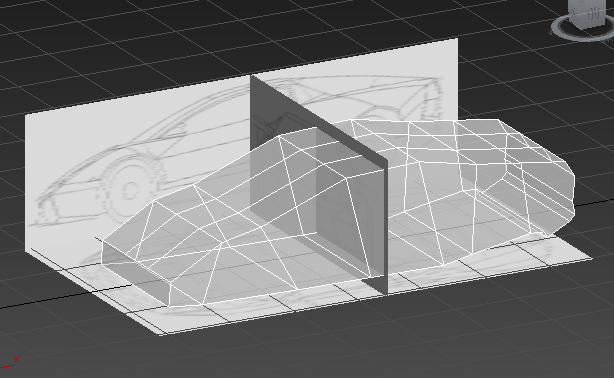
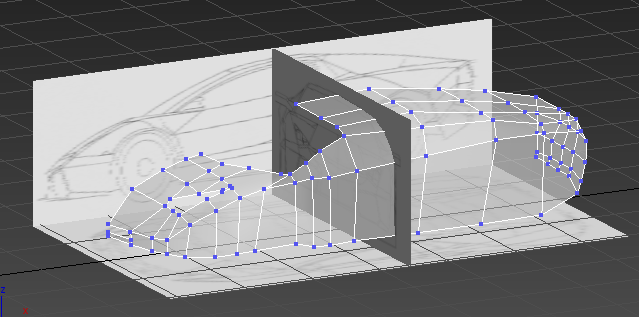
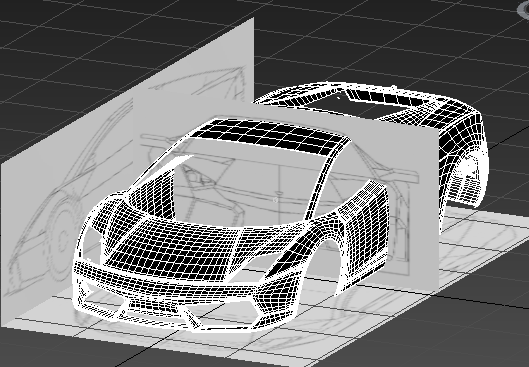
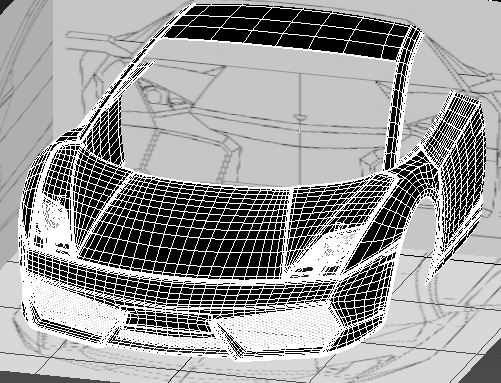
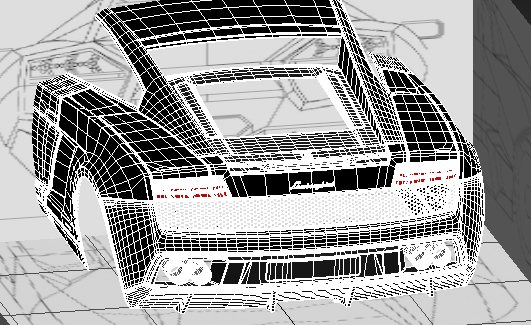
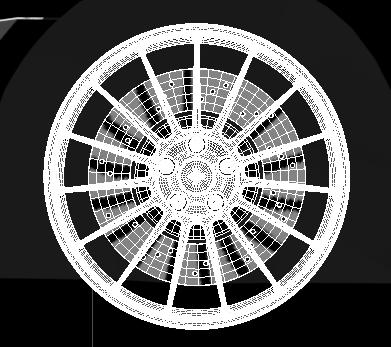
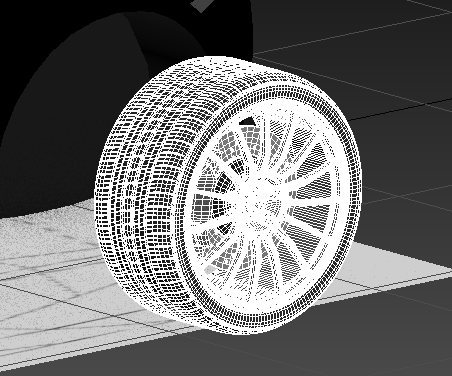
(3)根据视景系统的建模原则,借助3Ds Max软件创建了城市道路场景的各个单一模型,包括地面模型、汽车模型、虚拟天空模型、附属物模型等,并对模型进行优化处理,其中,对汽车模型的创建进行了详细的说明,并配有相应步骤的配图。之后再将这些单一模型导入Unity 3D,进行无人驾驶城市道路场景的三维虚拟构建。
最终,实现了无人驾驶城市道路的场景虚拟构建,构建的城市道路场景也具有一定的真实感,为无人驾驶与城市道路构建进一步的开发工作奠定了基础,具有一定的研究和应用价值。
关键词:无人驾驶 城市道路 场景构建
Abstract
As the future development direction of automobile, unmanned driving has attracted wide attention from all walks of life. The development of the key technology of unmanned vehicle plays an important role in the sustainable development of unmanned vehicle. This paper reviews and summarizes the development of unmanned driving technology and the construction of urban roads, and analyzes and discusses the difficulties and problems faced by this technology. Driverless technology is the inevitable direction of future automobile development, which is of great significance to reduce the driving strength and safety of the driver. The basic content is:
(1)This paper introduces the development situation of unmanned driving home and abroad and the basic situation of urban road construction
(2)Simple agency using modeling software 3 ds Max and scenario building software Unity 3 d, and in accordance with the principle of scene building, puts forward the overall frame structure of the scene, and to determine the overall solution and the scene build process
(3)According to the modeling principle of visual system, with the aid of 3 ds Max software created every single model of urban road scene, including the ground model, car model, virtual sky model, appendages, etc., and the optimized models, among them, the model of automobile create has carried on the detailed instructions, and equipped with corresponding steps illustrated. Then, the single model was imported into Unity 3D for 3D virtual construction of unmanned urban road scenes
Finally, realizes the unmanned city road scene virtual building, building of city road scene also has a certain sense of reality, for the development of unmanned and city road building further work laid the foundation, has certain research and application value.
Keywords: unmanned urban road scene construction.
目 录
摘要 1
Abstract 2
第1章 引言 1
1.1 研究背景与意义 1
1.2 城市道路的组成与特点 2
1.2.1城市道路的分类 2
1.2.2城市道路的特点 2
1.3 无人驾驶技术 3
1.3.1无人驾驶技术的简介 3
1.3.2无人驾驶技术的优点 4
1.3.3无人驾驶技术的弊端 5
1.4 国内外研究现状 5
1.4.1无人驾驶发展阶段划分 5
1.4.2国外发展情况 6
1.4.3国内发展情况 7
1.5 本文主要研究内容 8
第2章 软件开发工具 9
2.1 建模软件3Ds Max 9
2.2 场景构建软件Unity 3D 10
2.3 本章小结 11
第3章 场景模型的建立 12
3.1 场景模型建立原则 12
3.2 场景模型的建立 12
3.2.1 地面模型的建立 13
3.2.2 路面附属物的建模 14
3.2.3 无人驾驶城市道路构建 14
3.3 汽车的建模 15
3.4 本章小结 21
第4章 模型优化与虚拟场景合成 22
4.1 场景模型的优化技术 22
4.1.1 模型个数精简技术 22
4.1.2 纹理贴图技术 22
4.1.3 冗余数据简化技术 23
4.2 虚拟场景的合成 23
4.2.1 模型的导入 23
4.2.2 虚拟场景的构建 25
4.3 本章小结 28
第5章 结论 29
5.1 研究总结 29
5.2 研究展望 29
参考文献 31
致谢 32
第1章 引言
1.1 研究背景与意义
据公安部交通管理局统计,2017年,中国汽车保有量达到2.17亿辆,比2016年增加了2304万辆,同比增长11.85%。从汽车类型来看,共有一亿八千五百万辆乘用车,其中以个人名义登记的小型和微型乘用车(私家车)为一亿七千万辆,占乘用车的91.89%。运载货物的车辆数量为2341万辆,新登记数量为310万辆,是历史最高水平。从汽车保有量来看,全国许多中大型城市都超过了100万辆,其中北京、成都、重庆、上海、苏州、深圳和郑州甚至已经超过了300万。随着城市交通密度的增加,各大城市面临着交通堵塞和事故频发等问题,政府已经采取了许多如私家车牌拍卖、摇号限行等相关措施来解决交通问题。除了政策措施,无人驾驶道路交通研究等技术手段也受到越来越多的关注。设想一下,如果无人驾驶能够普遍运用于城市道路交通中,那么上述问题将全部得到合理解决。
无人驾驶汽车倾向于在车联网方面发展更多,从而实现人与车,道路,甚至设备之间的信息交换。它还能提供高精度的地图,并与其他车辆或设备通过云端进行交互,保持车辆按原车道行驶,避免进入错误车道。未来的驾驶和交通,甚至是我们自己的生活,将会更加有序和简单。人们无需再盯着方向盘,也不需要独自处理紧急情况,甚至可以避免增加不必要的驾驶时间。无人驾驶只是我们分担一些不必要劳动的一种方式,同时还可以简化生活并提高生活质量。此外,由于无人驾驶系统比人类更理性,所以在面对紧急情况时会处理地更到位,不会犹豫或者恐慌地做出错误的判断,也少了人类开车时的一些不必要的情绪,路上的交通将会有序很多,这样对于缓解交通堵塞也有很大的帮助。因此,无人驾驶汽车不仅能使驾驶生活更安全,而且还能够使得道路交通更加有序【1】。
随着时代的发展,计算机技术得到极大进步,所以在城市道路场景的三维虚拟构建上,我们可以运用3D max软件构建出城市道路中的各种单一模型,然后将其导入Unity 3D进行城市场景的构建,为数据计算和原理分析提供便利。
1.2 城市道路的组成与特点
1.2.1城市道路的分类
根据道城市道路系统的道路状况和交通功能,可分为快车道、主干道、次干路和支路
(1)快车道:
为了使城市的道路交通畅通无阻,使汽车的行驶能够安全、平稳和舒适,必须有平稳的路线,并与普通道路分隔开来。立体交叉应用于交通量较大的干路相交道路,而交通量较小的支路相交时采用平面交叉即可,但还需要采取一些措施来控制交通。当道路两边都有非机动车时,还须设置一个完整的隔离区来进行隔离。行人横过车行道时需要经过一个受控的交叉口或隧道或立交桥。
(2)主干道:
主干道是城市道路的骨架,其主要功能是交通运输,它把城市的各个区域都连接在了一起。在主干道上,行驶车辆的行车速度必须有一个范围限制,既不能太慢影响交通,也不能太快影响道路安全,所以有必要根据交通规模设置相应的道路宽度。当车辆进出交叉口时肯定会存在一些相互干扰,为了减小这些干扰,平面交叉口应该有控制交通的措施。在交通繁忙的主干道上,应该设立有慢速车道和快速车道(即超车道),这样可以将不同车速的车辆分割开来,提高交通运行效率。
(3)次干路
一个地区的主要道路但是还具有服务功能的一般交通道路,并与主干道相配合行成主干道路网络。从城市的整体布局与城市道路的关系来看,快慢车通常都是混合行驶。另外,在道路两侧应设有人行通道,以及一些公共建筑物。
(4)支路
支路属于区域性的交通服务,在连接着次干路与住房区的同时还能起到集散交通的作用,道路两旁可以设有人行通道,以及一些商业性的建筑。
1.2.2城市道路的特点
- 行人多
城市的人口密度很高,而人们的交通安全意识以及交通法规观念十分薄弱,所以在日常生活中尤其是在交通高峰时期,经常出现违章行走、乱占机动车道等现象,还有行人随意横穿马路或者直接就在车道上行走。这种人车之间的混乱交通将严重影响到交通安全【5】。
- 车辆多
由于经济的快速发展,城市里的交通工具不管是数量还是种类都变得越来越多了,特别是出租车和小巴士的数量增长迅速,其中个别司机的交通法规意识是很薄弱的,而且操作也不太规范。摩托车在城市中可以快速、灵活且随意地超车;自行车的数量很大,操作也很灵活,所以也经常占道行驶。这种交通状况导致机动车行驶速度很慢,道路流通性不够,进而造成交通堵塞,甚至是交通事故。
- 道路少
在中国的城市发展中政府对道路的维修改造从未间断过,但就目前情况来说,城市道路远远达不到现代交通的要求,在现代城市交通的发展中路少车多一直都是一个很大的矛盾,从某种程度上来说,这限制了城市的经济发展速度。此外,城市道路布局不合理,非法建筑的存在以及占道摆摊的行为大大减小了现有道路的利用率,这使得原有的矛盾更加突出。
- 交通设施完善,管理严格
城市交通安全管理设施比较齐全,提高了道路通行能力,特别是立交桥的出现,大大减轻了城市交通的负担。另外城市道路交通管理严格,物资人资充足,这也是维护良好交通秩序的一个保障。
1.3 无人驾驶技术
无人驾驶技术是多个技术的集成,包括传感器、定位与深度学习、高精地图、路径规划、障碍物检测与规避、机械控制、系统集成与优化、能耗与散热管理等。在系统的感知端由不同的传感器组成,其中包括GPS用于定位,光学雷达用于定位及障碍物检测,照相机用于深度学习的物体识别,以及定位辅助【3】。
1.3.1无人驾驶技术的简介
(1)精确定位和导航系统
通过对精确地图的研究和开发以及充分利用卫星导航技术,可以准确定位车辆的位置,从而实现车辆的路径规划。比如,谷歌自驾车的最大优势是多年来积累的谷歌街景地图【6】。
(2)ACC自适应巡航系统或激光测距系统
自适应巡航系统是一种控制系统,它能够根据不同的交通状况自动调节车辆的行驶速度。安装在车顶上的雷达可以探测前方障碍物的距离,并通过一系列的算法来识别道路上潜在的威胁【4】。
(3)车联网系统
汽车互联网是指实现汽车与汽车、汽车与道路、汽车与人、汽车与云数据的互动,以及实现汽车与公共网络之间的动态移动通信系统。它可以通过互联和互通的操作方式实现信息共享,并可以收集有关车辆、环境、道路的信息,然后在信息网络平台上实施信息处理和共享,从而将其应用于自动驾驶【8】。
(4)车道保持系统
通过识别车道线达到自动调整行驶位置的目的,除此系统外,还有夜视系统、前置视觉系统和环视系统。
1.3.2无人驾驶技术的优点
- 无人驾驶汽车的安全性大大提高
根据世界卫生组织统计的数据显示,全世界每年死于交通事故的人数都超过了七位数,且每年还在持续增长。仅在美国,每年就有33,000人死于交通事故。无人驾驶汽车具有大量减少交通事故数量的可能性,从而有可能挽救数百万人的生命。根据欧洲运输研究中心的调查显示,如果美国道路上90%的汽车都成为无人驾驶汽车的话,那么美国车祸的数量将从600万辆下降到130万辆,死亡人数将从3.3万辆下降到1.3万辆。无人驾驶汽车能够避免许多类似于驾驶员失误而导致的交通事故,还能极大减少酒后驾车等不良行为的出现,从而有效地提高道路交通的安全性【11】。
- 减少温室气体的排放量
无人驾驶汽车可以通过其控制系统来找到加速、制动和减速的最佳方式,始终将车速保持在经济范围内,这可以有效提高燃油效率,减少尾气中有害气体的比值,更加环保节能【7】。
- 缓解交通压力
首先,无人驾驶汽车可以显著降低交通事故的发生率,从而减少意外堵车的可能性。其次,智能汽车可以利用卫星导航来监测实时路况,从而规划出最佳路线,这大大降低了车辆拥挤的可能性。
- 让驾驶员拥有更多的自由时间
也就是说,司机不必担心道路的状况,但能够腾出时间去做他想做的事情。
- 提高老年人和残疾人的流动性
依靠无人驾驶汽车,老年人和残疾人等弱势群体不必担心出行不便,这也有助于社会福利事业的进一步发展。
- 停车场资源不再紧张
自动驾驶汽车可在抵达目的地时自动搜索停车位,不再需要就近停靠,在购物中心、酒店、车站等人流量巨大的地方可以有效地缓解停车场的压力。
1.3.3无人驾驶技术的弊端
- 安全性无法充分保证
无人驾驶汽车的发展从自动化程度来看可以分为四个阶段:辅助驾驶、半自动驾驶、高度自动驾驶和全自动驾驶。前三个阶段还是需要司机不同程度的参与,如果完全依靠自动驾驶系统的话可能会适得其反,反而使事故增多。而实现完全自动驾驶还有很长的路要走,这还需要其他领域的协同发展。从今天的技术水平来看,智能系统很难超越人的判断和认知水平,因此,驾驶员和乘客的安全与自动驾驶系统的自主性之间还存在巨大差距【14】。
- 过多依赖于卫星、网络
无人驾驶技术在很大程度上依赖于卫星导航技术,一旦信号干扰或中断,无人驾驶就只能是空谈了,想象一下,如果谷歌的无人驾驶汽车在路上无法从Google地图收到信息,那将是多么的可怕。
- 交通事故责任的认定方面
如果发生交通事故,应如何确定责任?难道要归咎于什么也没做的驾驶员吗?目前情况下没有法律能解释这一点【9】。
- 系统的可靠性
毫无疑问,无人驾驶本身就具有一定的风险。如果存在一些漏洞(如电脑操作系统),是否意味着其他人可以使用一些软件来侵入和控制你的汽车?细思极恐,这将会是一场灾难。你的车可能成为其他人手中的杀人工具,预防恐怖袭击将变得更加困难。
1.4 国内外研究现状
1.4.1无人驾驶发展阶段划分
产业信息网发布的《2015-2020年中国汽车驾驶辅助系统(ADAS)市场分析与发展前景预测报告》显示,关于无人驾驶汽车的阶段划分,这个行业参考最多的是美国公路安全局(NHTSA)对自动驾驶技术的官方定义,它分为五个级别:分别为无自动驾驶(零级)、个别功能自动驾驶(一级)、多种功能自动驾驶(二级)、受限自动驾驶(三级)和完全自动驾驶(四级)【12】。
从目前的发展情况来看,汽车行业一直都发展的不错,汽车技术不断得到提高,不断取得新的突破,所以自然而然自动驾驶完全被业界甚至是大众认可,其中在五个自动驾驶技术的等级中,个别功能自动驾驶(一级)已经基本普及开来,其他级别根据不同的地区和公司其发展水平也各不相同。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


