五相永磁同步电机直接转矩控制研究毕业论文
2020-04-08 14:24:24
摘 要
五相永磁电机直接转矩控制的传统方法存在着一些控制问题,如转矩与磁链脉动过大,以及相电流谐波有较高的畸变率,如果在直接转矩控制中,通过调制空间矢量这一方法来解决,那么这种实现过程就会变得极其复杂,参数也会无法准确调节,同时运算量也会变大。因此,为了较为简便地解决上述问题,本文提出了一种通过抑制三次谐波来改进直接转矩控制的方法。通过这种方式,五相永磁同步电机中的三维子空间可以充分考虑到,同时,电机的动态响应也会保持其良好的性能。除此之外,转矩、磁链脉动也能够有效减小,相电流中的三次谐波的含量也会大幅下降。直接转矩的传统控制方法运算较为简便,结构也比较简洁,而改进后的直接转矩控制也能够保持这些优势。从最后的仿真结果分析,可以得出这一理论分析正确,提出的提控制方法是具有可行性的。
关键词:五相永磁同步电机;直接转矩控制;谐波抑制
Abstract
The conventional method of five-phase permanent magnet motor direct torque control has some control problems, such as too much torque and flux chain pulsation, and a high distortion rate of phase current harmonics, if modulated in direct torque control The method of space vector is solved, then this realization process will become extremely complicated, the parameters will not be able to be adjusted accurately, and the amount of calculation will also become larger. Therefore, in order to solve the above problems more easily, this paper proposes a method to improve direct torque control by suppressing the third harmonic. In this way, the three-dimensional subspace in a five-phase permanent magnet synchronous motor can be fully taken into account, and at the same time, the dynamic response of the motor will maintain its good performance. In addition, the torque and flux pulsation can be effectively reduced, and the content of the third harmonic in the phase current is also greatly reduced. The direct torque traditional control method is simpler and simpler in structure, and the improved direct torque control can also maintain these advantages. From the analysis of the final simulation results, it can be concluded that this theoretical analysis is correct and the proposed control method is feasible.
Keywords: five-phase permanent magnet synchronous motor; direct torque control;
harmonic suppression
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1研究目的及意义 1
1.2国内外的研究现状 2
1.3研究内容 3
第2章 五相永磁同步电机数学模型 4
2.1 五相永磁同步电机概述 4
2.2 五相PMSM在ABC坐标系下的数学模型 4
2.3坐标变换 6
2.4 五相PMSM在αβ坐标系下的数学模型 7
2.5 五相PMSM在dq坐标系下的数学模型 8
2.6 本章小结 8
第3章 五相永磁同步电机直接转矩控制 9
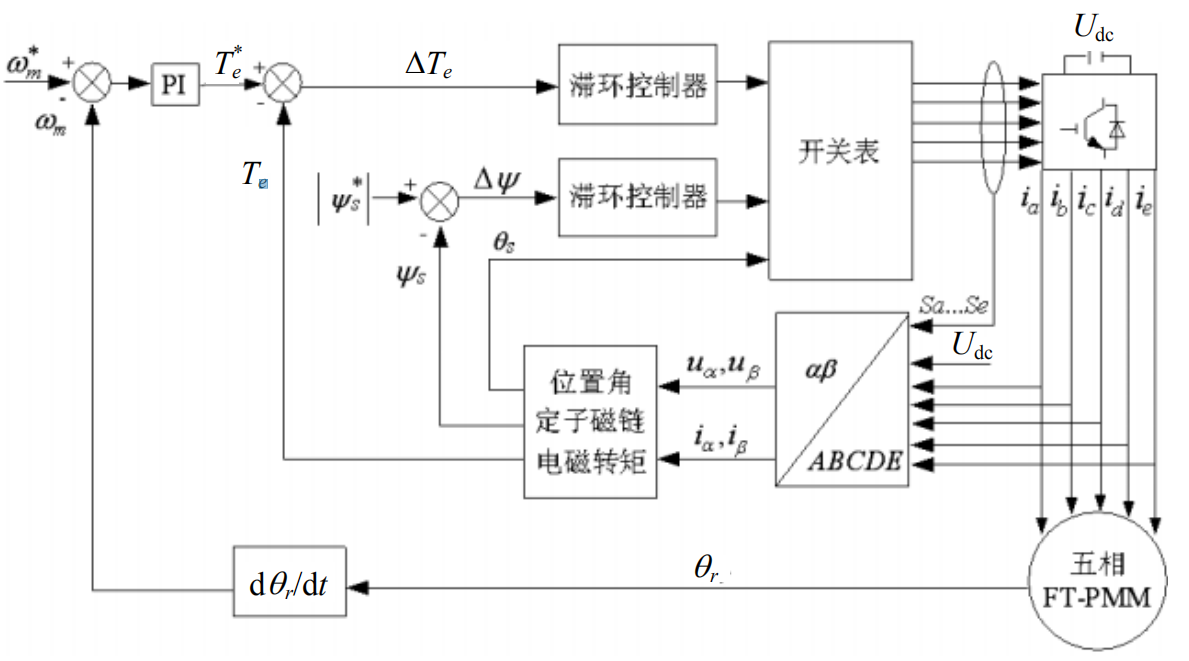
3.1直接转矩控制框图 9
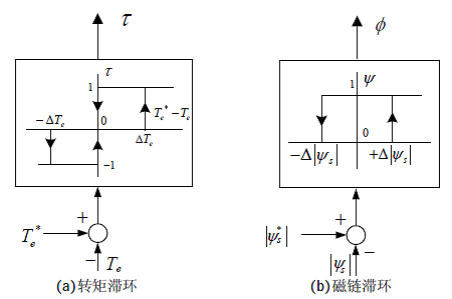
3.2滞环控制 10
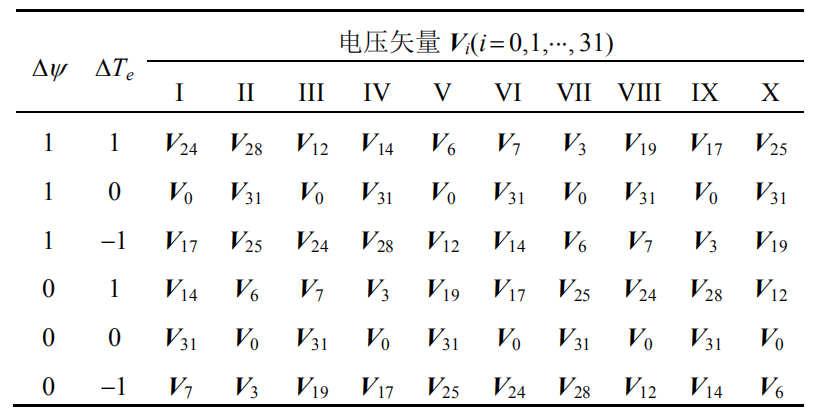
3.3开关表 12
3.4位置角、定子磁链、电磁转矩计算 14
3.4.1基本思想 14
3.4.2定子磁链控制 16
3.5 传统直接转矩控制存在的问题 17
3.6 优化直接转矩控制方法 18
3.7 本章小结 20
第4章 仿真结果分析 22
第5章 总结与展望 25
致谢 26
参考文献 27
附录 28
第1章 绪论
1.1研究目的及意义
自20世纪以来,电力不断融入生活各个方面,船舶、电动汽车以及电动飞机等行业发展及其迅猛,因此,对电机的效率的提升、转矩提高,以及电机的容错运行能力有着越来越高的需求,这也促使一批又一批研究员着手开发新型电机。在很长的一段时间里,在现代电力系统中,由于供电控制的限制,交流传动系统的理论和实践研究存在着一定的局限性,而且三相和单相系统居多,而对多相系统的研究还不太充分。而近年来,由于计算机控制理论的发展以及现代电力电子变换技术的逐渐熟练,电机驱动系统不再仅仅局限于两相和三相电源的供电,多相电机的相关技术发展迅速。
多相永磁电机及其控制系统的应用较为困难,而控制技术、微电子技术、传感器技术、和电力电子技术的发展很好的解决了这一难题。目前,人们越来越着重于对多相电动机展开研究,而五相永磁同步电动机则是其中之一。与此同时,对五相永磁同步电动机的控制系统也需要不断提高,也就是说,控制系统的动态响应能力不仅需要加快,同时静态性能也要愈发趋于稳定,控制精度也要不断提高。
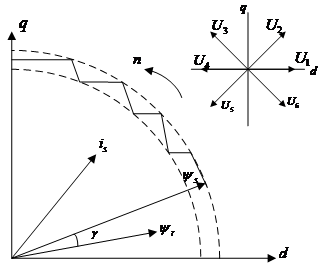
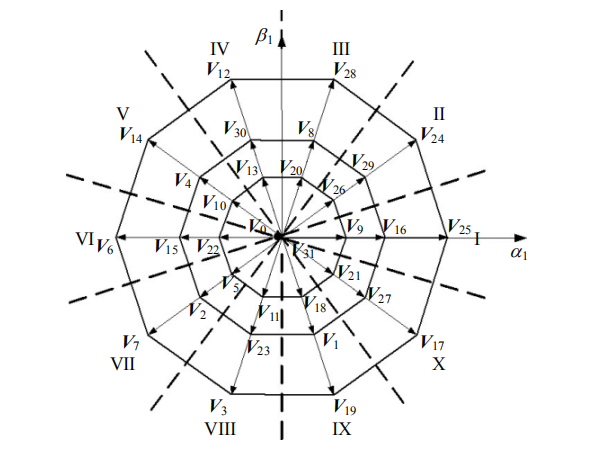
经研究发现,传统直接转矩控制策的开关选择表在对矢量。进行选择的过程中只控制了一维空间。中的电压矢量,而相应的五相永磁同步电机在三维空间中的所特别存在的电压矢量是失控状态的,因此导致三维空间中的磁链无法控制,最终的结果就是相电流的三次谐波含量居高不下。因从上面的分析可知,如果我们想要继续采用开关选择表来实现直接转矩控制更高的标准,这样的话我们在进行开关选择表的制定时就必须得合理的控制一下三维空间中所特别存在的电压矢量。
在一维空间和三维空间中,电压矢量的分布特点是完全不同的,通过研究我们可以得出两个结论:其一,一维空间中的小矢量。会在三维空间中变成。大矢量,而大矢量会。在三维空间中变成小矢量,与此同时中矢量在三维空间中任然保持不变,依旧为中矢量;其二,在原来的一维空间中的中矢量的方向在三维空间中会发生变化,从而在三维空间中与小矢量和大矢量的方向相反,这就说明,大矢量和小矢量与中矢量在三维空间中对磁链有着完全相反的的作用效果。
因此,在这样的一结论的基础上,我们可以得出一个能够相对抑制相电流中三次谐波含量的方法:对电压中矢量进行适当的选择,这样,就能在一定程度上将转矩和磁链置于受控状态,与此同时有效效抑制三维空间的磁链幅值,从而将相电流三次谐波含量有效降低。通过以上的分析可知,我们可以通过构建一套开关表,将一维空间和三维空间同时考虑在内,以此来达到控制的目的。
1.2国内外的研究现状
早在20世纪60年代,E.E.Ward和H.Harer就对五五相永磁同步电机做了一些理论探讨和实验分析,并得出了一个结论:当相数增加时,电机的转矩脉动频率会逐渐升高,相应的幅值逐渐降低。1980年,T.M.Jahns提出一种通过增加电机的相数和逆变器的相数的说法,从而提升交流传动系统的容错可靠性和运行能力。可是问题在于,三相电机控制比较简单,在当时已经逐步成熟,而多相电机的控制技术策略比较复杂,当时的技术水平还难以达到实现控制方案的需求,也正是以为此,多相电机和驱动控制的研究是一个大难题。
但进入20世纪90年代以后,由于电力推进、船舶等方面不断需求更高要求的高可靠性电力传动和低压大功率技术,导致了现代电机控制、微控制器技术、电力电子技术的不断发展,以至于在世界各地都开始展开对多相电机及驱动控制的研究,从而研究出了多种具有创新技术的多相电机模型、变频器拓扑结构以及控制策略。在美国,威斯康辛麦迪逊大学T.A.Lipo教授的研究团队主要研究了六相(双三相)感应电机矢量控制技术,以及如何建立和控制在断相后的六相(双三相)电机解耦模型的技术。美国德州Aamp;M大学H.A.Toliyat教授的研究团队着重研究了通过集中绕组的方法来提高多相电机转矩密度的技术创新,以及利用优化控制相电流来减小多相电机断相容错运行的转矩脉动的技术。英国利物浦约翰莫尔斯大学E.Levi教授的研究团队则着重深入研究了多相逆变器的PWM技术,提出了一种全新的脉宽调制方法,此方法不仅能提高电压利用率,还具有一定消除共模电压的作用。法国L2EC实验室的E.Semail教授的研究团队在开绕组式的逆变器的技术基础上,着重研究了了多相电机的容错控制的相关技术。而多相永磁电机可能会出现多种短路和断路故障问题,美国伦斯勒理工大学的L.Parsa博士的研究团队对这一问题提出了自己的见解和实验分析,并提出了全局的容错控制方法。西班牙学者F.Barrero和M.J.Duran率领的研究团队则重点研究了怎么通过模型预测控制的方法来达到多相感应电机变频调速的要求,以及实现开关管失效、断相等故障下的容错运行的能力。
在国内,也有很多研究团队在多相电机及其控制技术方面有卓越研究,主要有清华大学、华中科技大学、中国科学院电工研究所、浙江大学、哈尔滨工业大学、中船重工712所、海军工程大学等。海军工程大学是国内最早对十二相/三相双绕组交直流混合发电机展开研究的大学,主要针对其数学模型和短路特性有所建树,在十五相感应电机中非正弦供电方式下的稳态性能以及十五相电机对称断相下的参数变化的实验分析中也有所探讨,最近几年更是提出了一种研究用于储能的双九相电机的数学模型,并对其性能作了分析。哈尔滨工业大学则着重研究了五相、六相永磁电机的相关技术,重点讨论了电机的本体设计、SVPWM、断相容错控制、谐波抑制与谐波注入等问题。最早实现了十五相感应电机的变频调速控制的是华中科技大学。中船重工712所在多相电机调速控制系统研发得较为成熟和领先,并研制了10MW等级大功率船用多相电机电力推进系统的相关产品,这在国内是首次成功。浙江大学主要针对电机参数测量方法和多相电机的非正弦供电问题展开了研究,而在九相感应电机的直接转矩控制和矢量控制技术方面也有所研究,实现了基本的需求。清华大学针对双三相感应电机的全调制范围的PWM策略,以及其在线参数辨识和模型预测控制相关问题展开了研究,也研究了在船舶电力推进系统中,十五相感应电机的应用问题。中科院电工所着重研究了对多相永磁电机技术,并展开了断相容错的控制策略以及多维度优化的控制方法。
1.3研究内容
1)五相永磁同步电机的特点、原理;
2)针对三相永磁同步电机的相关布不足,作出研究分析,通过增加相数的,建立五相永磁同步电机数学模型;
3)针对传统直接转矩控制问题,可用三次谐波抑制的方法进行优化。
4)搭建系统仿真模型,分析仿真结果是否有效减小了直接转矩控制中转矩与磁链脉动的问题。
第2章 五相永磁同步电机数学模型
2.1 五相永磁同步电机概述
永磁同步电机的气隙磁场由永磁体来提供的,与电励磁电机或传统的感应电机相比,永磁同步电机结构更简单,体积也更小,效率更高,也正是因为此,永磁同步电机在伺服控制领域有着不可侵犯的主导地位,同样广泛应用于机器人和数控机床等工业领域。稀土永磁体在国防、航天航空方面十分重要,而我国的稀土资源占世界首位,十分丰富,这也导致了永磁电机的迅速发展。
永磁同步电机通过控制方式和驱动电流波形以及。电机的结构的差异,分为永磁同步电机(PMSM)和直流无刷电机(BLDC)。直流无刷电机采用集中绕组,相对PMSM于具有结构简单和功率密度较高的特点,但是BLDC也存在一定的问题,因为理想情况下电流波形时方波,反电势的波形是梯形波,平顶角度为120度电角度,所以在运行过程中电磁转矩的脉动比较大。对于PMSM来说,不存在换相的麻烦,因此能够进行连续的控制,故具有很小的转矩脉动,这样一来,PMSM大多应用于控制要求高的场合,而当需要较大功率时,通常采用特种电机或者交流电机。另外一方面,由于PWM调制需要通过直流无刷来控制相电流的大小,所以开关管最大开关频率会限制换相的周期,因此在电机,高速运转的情况下,直流无刷的控制效果就显得不是那么有效果。
三相永磁同步电机是比较常见也是最传统的永磁电机,它可通过电流坐标的PARK变换将励磁(d轴)和转矩(q轴)解耦,这样就可以得到比较好的动态调速性能,与直流电机类似,这种控制方式称为空间电压矢量控制,是当前永磁同步电机的最主要的控制策略。这种控制方式单独控制。d轴和q轴的电压矢量,当控制d轴分量为零时,就能够实现直接转矩控制;当控制d轴分量不为零时,能够达到弱磁控制,而控制的q轴分量则可以直接控制输出转矩,从而达到较好的调速性能。
五相永磁电机是多相电机。中的一种,它在传统的。三相永磁电机的基础上,增加了电机供电的相数,从原来的三相增加到五相,这样,每相供电的相位差变为360/5=72度。同样的,A、B、C、D、E五相绕组就需要电压逆变器通过5个桥臂来分别驱动。在90年代的时候,国外的相关学者就曾提出这样。的思考,在五相电机上运用传统的三相同步电机的SVPWM的直接转矩控制策略,而且五相电机的直接转矩控制响应速度要比三相电机的直接转矩控制响应速度更快,同时脉动更小。
2.2 五相PMSM在ABC坐标系下的数学模型
五相PMSM的结构简图如下图图1所示,图中五相绕组都为集中整距形式,并且均匀分布在定子圆周上。
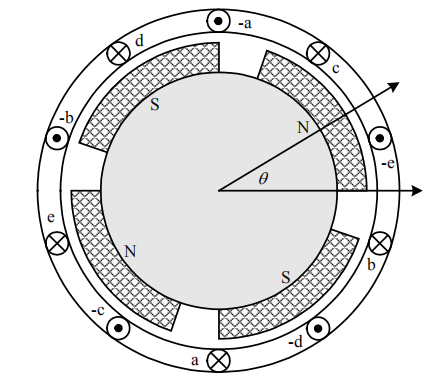 图 2.1 五相 PMSM 结构框图
图 2.1 五相 PMSM 结构框图
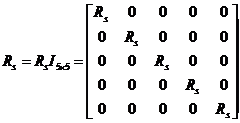
定子电压方程可以表示为
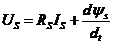 (2.1)
(2.1)
其中,



定子磁链方 程可以表示为
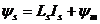 (2.2)
(2.2)
由电机原理中的虚位移法我们可以得知,当电流不变的情况时,电磁转矩与磁共能对转子机械角的偏导数相等,如下式所示:
 (2.3)
(2.3)
式中: 为转子机械位置角;
为转子机械位置角; 为转子电气位置角;
为转子电气位置角; 为电机极对数。
为电机极对数。
电感矩阵和永磁体磁链的表达式分别是以下2.4和2.5所示:
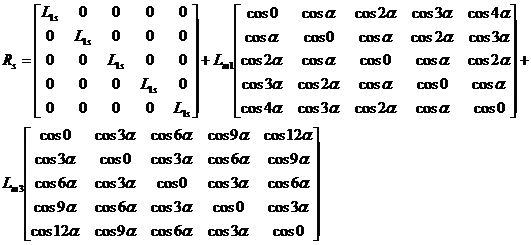 (2.4)
(2.4)
 (2.5)
(2.5)
式中: ,
, ,
, ;
; 为 3 次谐波磁链幅值,
为 3 次谐波磁链幅值, ;
; 为相邻两相绕组轴线间夹角,
为相邻两相绕组轴线间夹角, ;
; 为真空气隙磁导率;
为真空气隙磁导率; 为定子铁心轴向有效长度;r为定子铁心内半径;g为等效气隙长度。
为定子铁心轴向有效长度;r为定子铁心内半径;g为等效气隙长度。
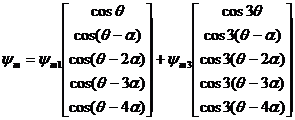
由以上的分析。我们可以得出。,五相PMSM中转子为隐极结构时。,气隙是均匀的,而转子位置角相关的量在定子电感矩阵中不存在,并且基波绕组与3次谐波绕组之间的互感在均匀的气隙圆周。内积分结果为0。在这样的计算结果中,我们就可以得出一个结论:含有3次谐波磁场的五相永磁同步电动机定子是由3次谐波绕组和相互独立的基波绕组构成的,而这两种绕组都是用的同一条磁路。
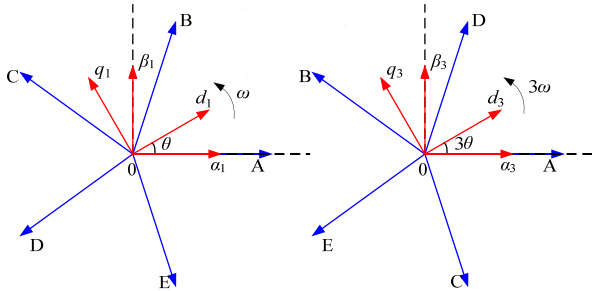
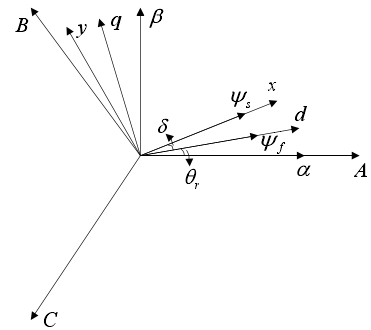
2.3坐标变换
想要对五相PMSM转矩和转速达到精确控制,需要了解到矢量控制的基本原理,在首先要做的就是变换3种坐标系,从而使在定子电流中的转矩分量与励磁分量相互解耦,这种等效原则的作用效果相同的,这样一来磁动势或功率就会变得一致。由三相PMSM矢量控制系统我们可知,选取坐标变换是有一定的要求的,也就是变换前后幅值是保持不变的,这样一来,我们可以列出五相PMSM的静止坐标变换矩阵如下式所示
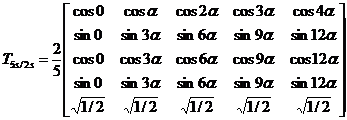 (2.6)
(2.6)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


