越障行星轮结构设计毕业论文
2020-04-08 14:24:33
摘 要
越障行星轮机构在平时的生活中随处可见,应用最为广泛的是一些需要人力来牵引的小车,一般用于平时生活中运送一些重量不是很大的货物,行星轮小车的优点是在牵引小车前进的过程中,当遇到台阶和石块等障碍物的时候可以实现自动翻越,而且上下震动幅度并不是很大,这使得生活更加便利,另一方面,在航空航天领域,一些国家将行星轮技术应用到月球车等高精尖领域,并取得了非常好的效果,然而,民用的行星轮机构能承载的货物重量有限,限制了行星轮应用到更多领域。另一方面,航空航天领域的行星轮机构太过于精密,而且成本极高,不适用于日常的生活,所以设计一款价格便宜,同时载重较大的越障行星轮机构变得非常有必要。
本次的设计任务包括行星轮结构的设计和行星轮小车的车体设计,其中前者是设计的重点内容。行星轮组的结构设计包括标准件的选型和非标件的设计,以及对于不同工件受力的校核,由于行星轮中的零件一般都体积较小,但是行星轮机构的承重却达到了3000N,并且还要考虑到只有三个车轮与地面接触的特殊情况,所以设计过程中对单个行星轮的受力分析是设计过程重中之重,在设计行星轮的时候,首先要选定小车车轮,然后确定齿轮齿数,接着根据轴所受最大力矩和弯矩确定最小轴径进而选定电动机和减速器,其他的结构则是一些非标件,非标件设计时应满足整个行星轮机构的应力要求,同时还要避免与地面发生干涉。
最终得到的行星轮小车能够实现自动翻越楼梯,进行转向和承载一定重物的功能。对其建立三维模型并且进行ANASY分析,验证了本次设计的行星轮小车结构满足应力和应变要求,另一方面,在满足受力条件的前提下还要有一定的创新性,本次设计工作的创新点在于电动机和减速器的倾斜放置以及后面两个车轮利用换向器实现了同步同向旋转,保证了车体能够正常的前进和转弯。
关键词:行星轮机构;轮式;受力分析;创新性;应力要求
Abstract
The transcriptional planetary wheel mechanism can be seen everywhere in ordinary life. The most widely used ones are small cars that need manpower to pull. They are generally used to transport some goods of less heavy weight in ordinary life. The advantage of the planetary wheel trolley is that it can be automatically overturned when it encounters obstacles such as steps and stones, and the magnitude of the up-and-down vibration is not very large, making life more convenient, on the other hand. In the field of aerospace, some countries have applied planetary gear technology to advanced areas such as lunar rovers, and achieved very good results. However, civilian planetary gear mechanisms can carry limited weight of cargo. And most advance by manual traction. On the other hand, the planetary gear mechanism in the aerospace field is too precise and too expensive to be used in daily life, so it is necessary to design a cheap and heavy planetary gear mechanism.
The focus of this design is the design of planetary wheel structure, followed by the body design of the whole planetary wheel car. The structure design of the planetary wheel group includes the selection of standard parts and the design of non-standard parts, as well as the checking of different workpiece forces. Because the workpieces in the planetary gears are generally small in size, but the planetary gear mechanism has a bearing capacity of 3,000 Ns and takes into account the special case where only three wheels are in contact with the ground. Therefore, the stress analysis of a single planetary gear in the design process is the most important in the design process. When designing a planetary wheel, first select the car wheel, and then determine the number of gear teeth. Then the minimum shaft diameter is determined according to the maximum moment and bending moment of the shaft, and then the motor and the reducer are determined. The other structures are some non-standard parts, which should meet the stress requirements of the whole planetary gear mechanism when the non-standard parts are designed. At the same time, avoid interference with the ground.
The resulting planetary wheel car can automatically turn over stairs, steer and carry certain weights. The three-dimensional model is established and ANASY analysis is carried out to verify that the structure of the planetary wheel trolley meets the requirements of stress and strain. On the other hand, there is a certain degree of innovation on the premise of satisfying the stress condition. The innovation of this design work lies in the tilt placement of the motor and the reducer and the synchronous and coaxial rotation of the rear two wheels using commutators to ensure that the carbody can advance and turn normally.
Key Words:planetary gear mechanism; wheel type; force analysis; innovation;Stress requirement
目 录
第1章 绪论 1
1.1 课题研究背景 1
1.2 课题研究目的和意义 1
1.3 国内外研究现状 2
第2章 机械结构设计 6
2.1 总方案的叙述 6
2.2 行星轮组详细设计 7
2.3 车架的设计 18
2.4 总体布局 20
2.5 本章小结 21
第3章 越障能力及静力分析 22
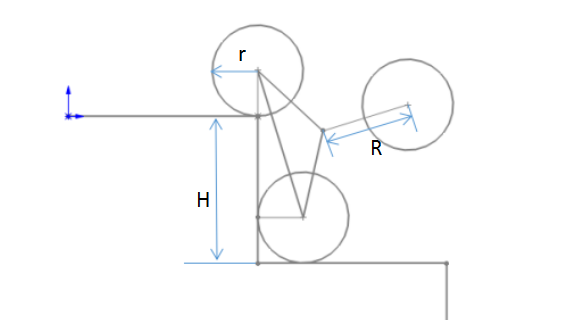
3.1 越障高度分析 22
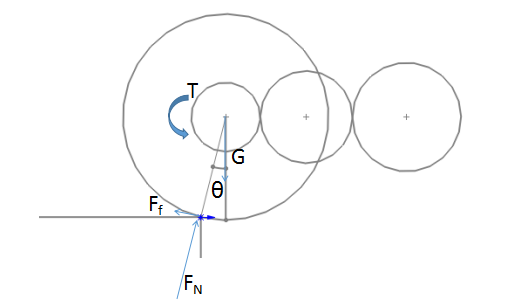
3.2 越障坡度分析 23
3.3 ANASY有限元静力学仿真分析 24
3.4 本章小结 25
第4章 总结与展望 26
4.1 全文总结 26
4.2 研究展望 27
参考文献 28
致谢 29
第1章 绪论
1.1 课题研究背景
越障机构存在于众多工作环境中,可根据其工作目的选择不同的越障机构,目前越障机构以轮式,履带式,足式为主[1]。不同的越障机构特点不同,应用领域也不尽相同。轮式越障机构具有工作效率高,负重比高,结构简单的特点,能够在平坦的路面上以较高的速度行驶,同时调运方便,具备大规模运输的潜力,其缺点也很明显,例如在崎岖的路况下越障性能差,在大载重的情况下体积相对较大的特点:履带式越障机构由于采用履带结构,与地面接触面积大,能够在泥泞和崎岖的道路间行进,具有越障能力强,地形适应能力强的优点,其缺点是结构复杂,体型笨重,能量利用率低,足式越障机构具有运动灵活,能够适应多种地形的特点,不过缺点是结构复杂,控制和操作难度大,其载重能力较小,成本相对高昂[2]。
针对在工业生产和科技研究中各型越障机构所面临的问题,对传统的越障机构进行优化,研究出一种使用方便,越障能力强,结构简单,控制方便的新的越障机构成为了一个热门的研究方向,轮组式的出现恰好解决了这一问题,行星架使得安装在行星架转臂上的各个车轮可以同时实现自转和公转。在遇到障碍时,与障碍接触的车轮前进被阻挡,利用行星轮的杠杆作用实现另一轮子的翻转[3],从而达到了越障的目的,另一方面,轮组式可以面对众多类型的障碍,具有很好的通用性,在翻越某些障碍,例如台阶时,轮组式具备天然的优势,对地面损害小的同时摩擦力会更大,在更换更强驱动力电机的时候具备更强的承载能力。
1.2 课题研究目的和意义
在越障行星轮已经普遍应用于日常生活中的今天,对传统的越障行星轮结构进行进一步的改进和优化仍然十分有必要[4],在本次的机械设计中,将运用最新的控制传动系统,使其实现自动化或者半自动化,设计成一款在载重200kg的情况下仍能进行爬楼梯并进行简单转向的越障行星轮机构,同时对于其越障能力进行详细的分析,使行星轮小车能够代替当下的一些运输机械,降低运输成本,同时也是为了设计一款最新的搭载平台,提高运输机械的越障能力。
对于越障行星轮的进一步优化,其应用范围十分广泛,在设计出底盘的前提下,可以安装到多种运输设备,既可以用于工业生产中货物转运,也可用于山间重物的运载,地震废墟中探索生命迹象,或者在崎岖不平的路上运载货物,在城市的高楼内用于利用楼梯转运货物,还能够扩展行星轮小车的工作区间,例如可以在一些极度危险的环境中代替工人运送货物,不仅可以节约运输成本,而且还能够保障人身安全,减轻劳动强度。同时我们在设计行星轮小车的过程中简化了运输机构,提高了运输的效率,为行星轮越障能力的具体分析提供了依据,也为行星轮应用于其他领域提供了参考[5]
1.3 国内外研究现状
履带式:
中国航天科工集团第四研究院探测与控制技术研究所针对目前排爆工作十分危险,造成人员和人民财产损失巨大这一情况,设计出新一代的排爆机器人—雪豹20,该产品是一款典型的单节双履带式移动机器人,抓举能力为15kg,能够适应大部分恶劣环境,同时也具备优异的抓举能力。
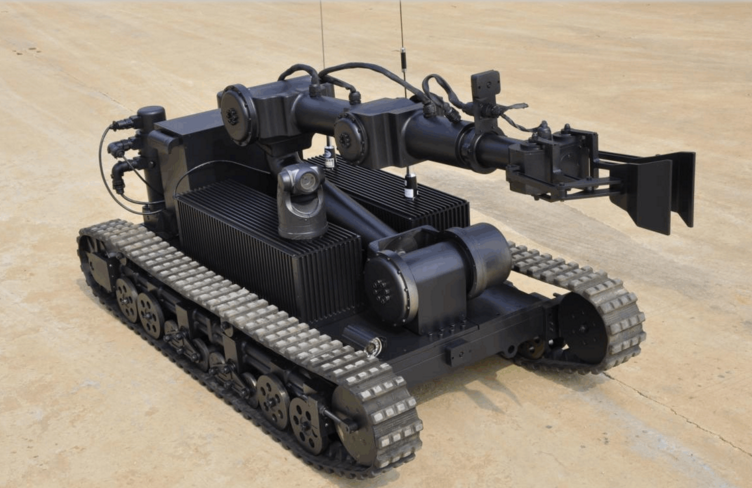 图1.1 雪豹20
图1.1 雪豹20
日本千叶工业大学在前些年研发了一款双节双履带式移动机器人——Quince。它的体积较小,由于安装了六个马达,所以运动十分的灵活,同时Quince安装有很多的传感器,能够感知环境温度,甚至能够探测到人体呼吸以及体温情况,十分适合地震后对于幸存人员的搜救工作,由于日本是地震多发的国家,所以这款搜救机器人对于抗震救灾具有十分重要的意义。
 图1.2 Quince
图1.2 Quince
轮组式:
哈尔滨工业大学于2003年成功研制了行星轮式月球车[4],该月球车采用三轮式行星轮组,共四组行星轮,能够实现越障和平地行走两种模式,高大的行星轮组赋予了其卓越的越障能力,使其能够克服绝大多数障碍,较宽的接触面使其能够在松软的地面环境下顺利前进,同时还具备优越的载重能力,车轮做的较宽,形似履带,大大增大了与地面的接触面积,能够在土质松软的环境下正常行走,在一定程度上克服了轮式行星轮不能再松软的环境下行走的缺点。不过这辆月球车高度较高,稳定性不佳,另一方面就是重量较重,还有很大的改进空间。
 图1.3 哈工大行星轮式月球车
图1.3 哈工大行星轮式月球车
华中科技大学机电工程学院研制了一款小型地面移动机器人,采用了与哈工大类似的行星轮组,动力装置放在前端,后面的两个行星轮组被牵引,车体分为前后两部分,该车越障能力极其优越,行星轮铰接式底盘使得前后两部分相对独立[6],前端底盘可以脱离后端底盘进行接近垂直的爬越动作,这使得小车能够翻越远超一般行星轮能够翻越的高度。
 图1.4 华中科技大学面移动机器人
图1.4 华中科技大学面移动机器人
国防科技大学机电学院也研制了一款登月车,其特点是利用了内行星轮啮合的方式,想法非常有创意,和外行星轮啮合的机构相比,内行星轮啮合的结构十分简单,依靠链式结构来进行动力传动,不过其实质仍然是单个车轮运动,越障性能和普通车轮没有太大的区别[7],同时机体过于笨重庞大,严重限制了他的应用。
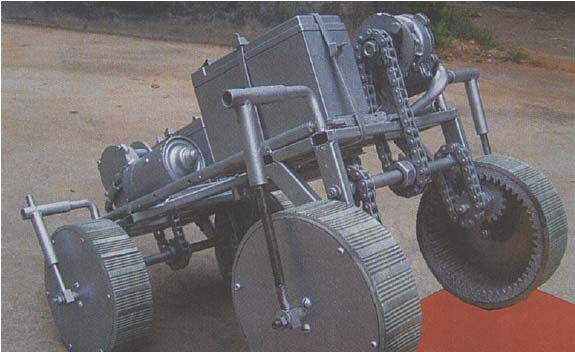 图1.5 国防科技大学登月车[7]
图1.5 国防科技大学登月车[7]
腿足式:
腿足式作为最开始采用的爬楼梯的方式,现如今变得很少被人关注,2004年日本丰田公司设计出一款腿足式机器人名叫iFoot,自身体积较为庞大,不过载重能力优良,最大载重能力达到了200kg,其设计的目的是用来载人,所以上身设计成贝壳状的外壳,方便乘坐者进行乘坐,在人的操纵下能够灵活的进行前进后退侧移等基本动作,移动十分灵活,不过缺点是移动速度较慢,目前未得到大面积推广。
 图1.6 iFoot[7]
图1.6 iFoot[7]
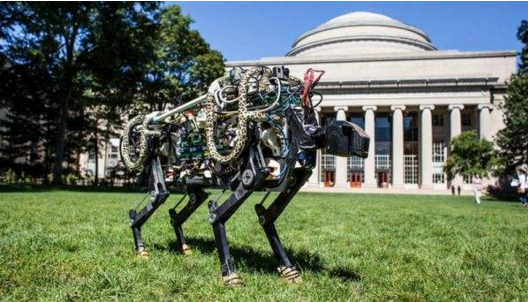 Boston Dynamics公司于2005年研发的一套军用运输装备--“大狗”,并且在后来的几年进行了数次升级。“大狗”具备非常优秀的越障性能和平衡性能,能够帮助士兵驼运重达150kg的装备,由汽油发动机驱动,为每条腿的三个关节提供足够的动力,并且腿部还有一个“弹性”关节。最大前进速度达到了每小时四英里,最值得称赞的还是他的平衡性能,它能够毫无压力的行走在光滑的冰面上,即使踹上一脚它也能迅速的恢复平衡,更令人惊讶的是,它还具备高达一米的跳跃能力,科技含量非常高。
Boston Dynamics公司于2005年研发的一套军用运输装备--“大狗”,并且在后来的几年进行了数次升级。“大狗”具备非常优秀的越障性能和平衡性能,能够帮助士兵驼运重达150kg的装备,由汽油发动机驱动,为每条腿的三个关节提供足够的动力,并且腿部还有一个“弹性”关节。最大前进速度达到了每小时四英里,最值得称赞的还是他的平衡性能,它能够毫无压力的行走在光滑的冰面上,即使踹上一脚它也能迅速的恢复平衡,更令人惊讶的是,它还具备高达一米的跳跃能力,科技含量非常高。
图1.7 大狗
第2章 机械结构设计
2.1 总体结构概述
2.1.1行星轮组方案的选择
行星轮组分为外行星轮组式和内行星轮组式[8],内行星轮组式行星齿轮与太阳齿轮内啮合,这样也相应的造成了太阳齿轮体积过于笨重,不适合对承载货物,更不适合进行连续翻越楼梯的动作,外行星轮组可分为两轮式行星轮组、三轮式行星轮组、四轮式行星轮组(图2.1)和其他行星轮组,但是两轮式行星轮组在进行翻越时高度变化过大,造成机械颠簸严重,根本不适合运载货物,所以舍弃这一方案,同时,四轮及四轮以上时,虽然机构的平衡性得到了加强,但是也使机构体积庞大,结构也更复杂,越障能力也不断下降,制造成本大大提高,所以综合以上对于不同行星轮组的分析,我们本次设计采用三轮式行星轮组。
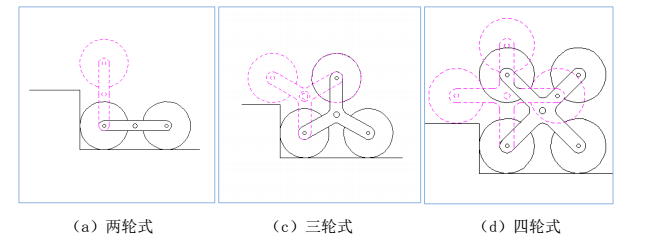 图2.1 行星轮组
图2.1 行星轮组
2.1.2越障过程分析
普通行星轮的自由度为二,只有添加两个确定的输入,机构才会有确定的运动。当行星轮在平地上行走时,每个行星轮组有两个轮子着地,在重力和地面支持力的作用下约束其中一个自由度,由电动机驱动中心齿轮作为输入端。当遇到较矮的障碍物时,行星轮可以像普通车轮一样直接越过,不会发生其他变化,当遇到较高的障碍物如楼梯时,最前端的行星轮前进受阻,在摩擦力的作用下停止转动,此时限制了一个自由度,驱动轮系就变成了行星轮系,行星轮支架就变成了转臂绕受行星齿轮的中心回转,实现翻越障碍的动作[9-16],利用了行星架的转向与中心齿轮转向相同的特点,这种机构可以不需要人为控制而根据路况自动作出调整,具备很强的越障能力,同时也可以作为自动和半自动越障机构的研发基础,进行更进一步的开发,应用前景十分广阔。
2.2 行星轮组详细设计
2.2.1车轮选型
根据前期了解,标准的楼梯高度一般在140mm到180mm之间,坡度为20度至38度,楼梯宽度为250mm到300mm,所以不妨设定此次爬楼梯高度为160mm,楼梯宽度为270mm。在网上可购买到的车轮中,车轮直径要低于180mm,一方面要防止车轮间发生干涉,另一方面是因为台阶宽的有限,不能选用直径太大的车轮,车轮过大呀会严重限制机体结构的设计。同时车轮直径又要适当大一些,这样可以避免行星架与楼梯发生碰撞,又能提高越障能力。选定的车轮还必须能够承受满载时的压力。综合各方面因素后,选定车轮直径为125mm,同时,预期的设计目标为:
越障高度:160mm
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


