基于蚁群算法的无人机航迹规划及仿真毕业论文
2020-04-08 14:24:50
摘 要
无人机技术正随着时代的发展发生着惊人的进步和改变,并广泛应用于军事任务和民用任务中。无人机航迹规划,作为无人机安全飞行和精确打击的关键一环,正逐渐成为全世界研究人员关注和探讨的重中之重。而蚁群算法,作为一种新兴的仿生学算法,具有优良的鲁棒性,有良好的分布式计算机制,并且能够很好地与其他方法相结合,能够灵活地运用于许多行业和领域,这其中就包括了无人机航迹规划领域。
本文从蚁群的生物学基础开始,详细介绍了蚁群算法的基本思想和解决典型TSP问题的数学模型,并提供了一种解决TSP问题的具体流程。此外,还对蚁群算法的复杂度和优缺点进行了较为深入的分析。
进一步地,介绍了无人机航迹规划的相关定义、结构构成以及分类方法,并提出了对航迹规划的基本要求,同时详细阐述了无人机的约束条件。最后,对基本蚁群算法从三方面进行了改进,分别是引入最大-最小蚂蚁系统、引入路径拥挤度约束系数以及引入信息素挥发因子适应性调整,这在一定程度上避免了局部最优,并缩短了搜索时间。
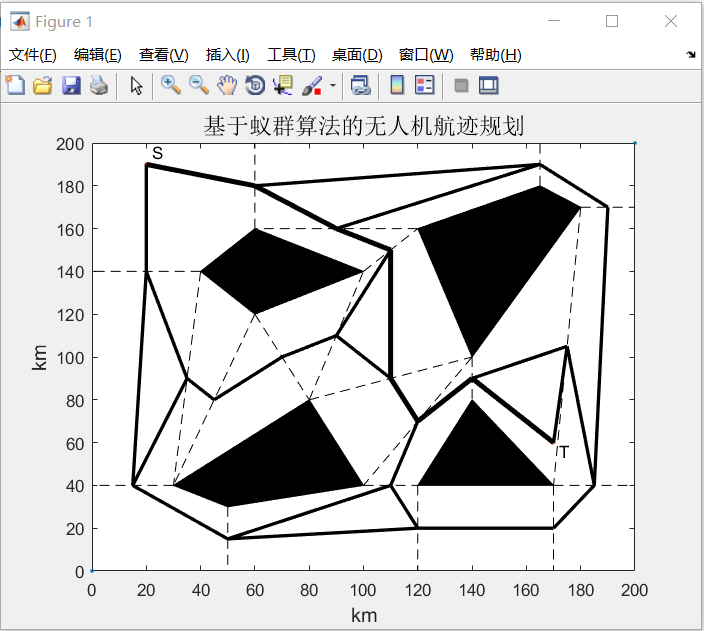
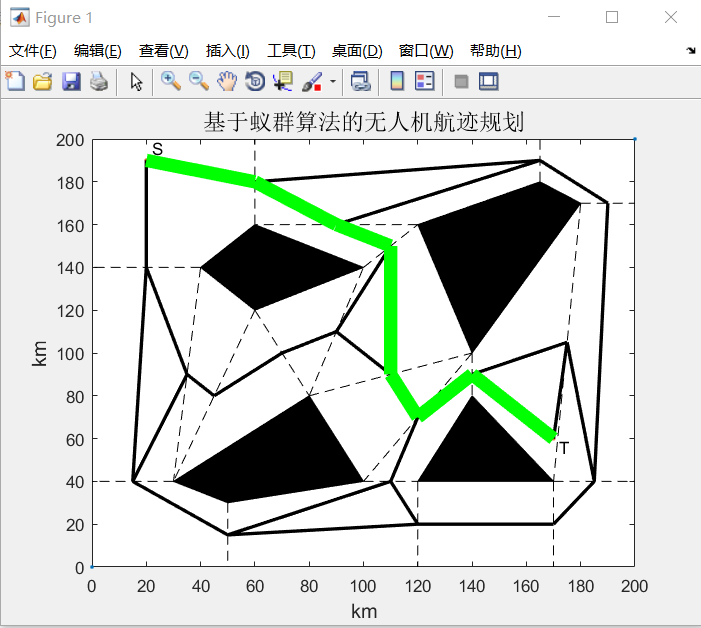
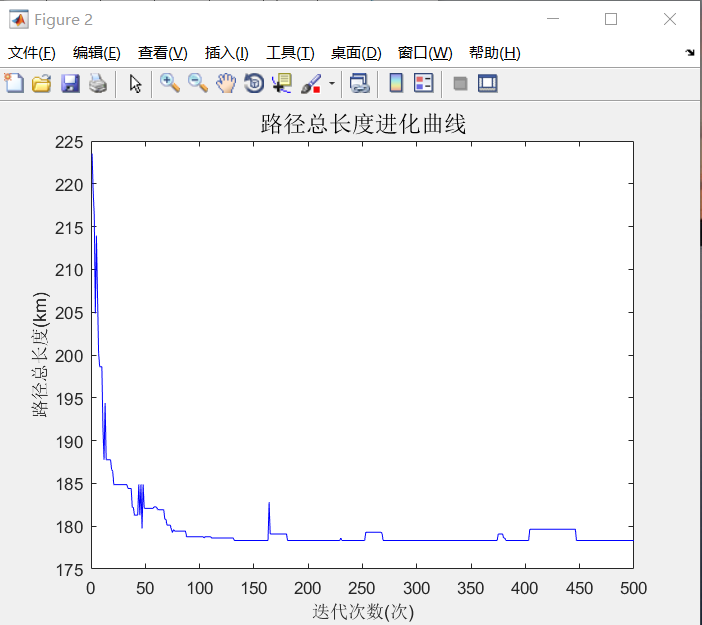
本文还举例说明改进蚁群算法在无人机航迹规划中的实际应用,借助于MATLAB平台进行仿真,检验了改进蚁群算法在航迹规划中具有的良好效果。
关键词:蚁群算法,无人机,航迹规划,MATLAB
Abstract
With the development of the times, UAV technology has made amazing progress and changes, and is widely used in military tasks and civilian fields. Route planning of Unmanned aerial vehicle, as a key part of unmanned aerial vehicle’s safe flight and precision strike, is increasingly becoming an important matter to concern about and discuss of scholars and researchers all over the world. Ant colony algorithm, as an emerging bionics algorithm, has excellent robustness, outstanding distributed computer system, and can be easily combined with other methods. It can be used flexibly in many industries and fields, including the field of route planning.
This paper begins with the biological basis of ant colony, introduces the basic thought of ant colony algorithm and the mathematical model to solve the typical TSP problem in detail, and provides a specific process of working out the TSP problem. In addition, the complexity, advantages and disadvantages of the ant colony algorithm are also deeply analyzed.
Furthermore, the definition, structural composition and classification methods of UAV route planning are introduced, and the basic requirements for route planning are put forward. At the same time, the constraints of the UAV are described in detail. In the end, the basic ant colony algorithm is improved in three aspects, including the introduction of the max-min ant system, the constraint coefficient of the path crowding degree and the adaptation of the pheromone volatilization factor, which avoid the local optimum to a certain degree, and shorten searching time. This paper also illustrates the practical application of improved ant colony algorithm to UAV route planning. With the assistance of the MATLAB platform, the improved ant colony algorithm is proved to have better effect in route planning.
Key words: ACO, UAV, Route planning, MATLAB platform
目 录
摘 要 I
Abstract II
1 绪论 3
1.1有关无人机航迹规划的相关研究 3
1.1.1无人机及其航迹规划 3
1.1.2无人机航迹规划国内外研究现状 5
1.2有关蚁群算法的相关研究 6
1.2.1蚁群算法综述 6
1.2.2蚁群算法国内外研究现状 6
1.3课题研究背景与意义 8
1.4本文的研究内容与结构安排 9
2 蚁群算法概述 10
2.1 蚁群的生物学基础 10
2.2 蚁群算法的基本思想 11
2.3 蚁群算法的数学模型 12
2.4 蚁群算法在解决TSP问题中的具体流程 14
2.5 蚁群算法的复杂度分析 15
2.6 蚁群算法的优缺点分析 16
2.7 本章小节 17
3无人机航迹规划概述 18
3.1 无人机航迹规划的定义 18
3.2 无人机航迹规划的基本要求 19
3.3 无人机的约束 20
3.3.1 无人机的系统约束 20
3.3.2 无人机的威胁约束 22
3.4 无人机航迹规划的代价分析 23
3.5 无人机航迹规划的常用算法 25
3.6 本章小结 27
4 蚁群算法在无人机航迹规划中的应用 28
4.1 基本蚁群算法的改进 28
4.1.1 基本蚁群算法的缺陷 28
4.1.2 基本蚁群算法的改进策略 28
4.1.3 改进蚁群算法的实现步骤 32
4.2 无人机航迹规划空间建模 32
4.2.1 飞行区域建模 32
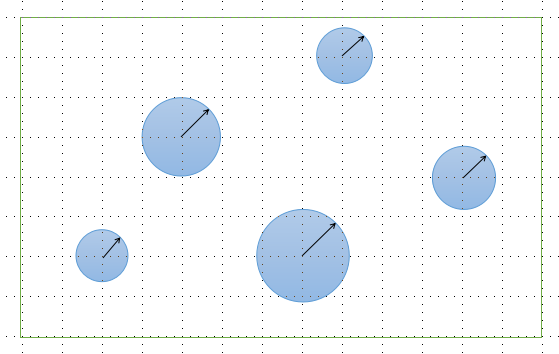
4.2.2 威胁区域建模 33
4.2.3 最优航迹建模 34
4.3 无人机航迹规划应用实例 35
4.3.1 航迹规划任务设定 35
4.3.2 航迹规划设计与仿真 36
4.3.3 航迹规划重要代码介绍 38
4.4 本章小结 41
5 总结与展望 42
5.1 论文总结 42
5.2 展望 43
参考文献 44
致 谢 46
1 绪论
1.1有关无人机航迹规划的相关研究
1.1.1无人机及其航迹规划
无人机(Unmanned Aerial Vehicle,UAV)是一种有动力、可控制、可执行多种任务的无人驾驶航空器。无人机自诞生以来,主要应用于军事方面。作为一款智能化和信息化的现代化武器,无人机在侦查、监视、通信、远距离攻击等方面都发挥了重要的作用。
1887年,英国人道格拉斯·阿奇博尔德(Douglas Archibald)将相机放在风筝上,这一组合形成了无人侦察机的雏形。而在随后的美西战争期间,这一组合得到了进一步的应用,并拍摄了大量照片[1]。1909年,美国发明家埃尔默·安布罗斯·斯佩里(Elmer Ambrose Sperry)成功研发出了用于保持飞行稳定的陀螺仪,无人机诞生前的各项工作在这几年已准备就绪,等待着腾飞的到来。
1917年出现的美国“空中鱼雷”、“凯特琳虫”以及后来出现的英国“喉”式单翼无人机被认为式现代无人机思想的源泉。20世纪40年代,第二次世界大战爆发后,无人机用来作为军事演习中的靶机,需求量激增,众多国家以此来检验防空武器的作战性能。20世纪50年代至70年代,无人机开始执行一些简单的军事侦察任务,这一现象最早出现在越南战争中,当时的瑞安无人机家族累计飞行超过3400架次。20世纪末,以色列首次为无人机赋予战斗使命,在那次“加利利和平行动”中,以色列使用了不同类型的无人机执行侦查、干扰和诱饵工作,在入侵黎巴嫩的战斗中有效夺得了制空权。
国内的无人机发展起步较晚,20世纪70年代,我国在分析我军击落的美军BQM-147H型侦查无人机残害基础上,开始研制国产无人机。20世纪80年代开始,我国逐步开始将军用无人机投入使用。进入21世纪,随着电子信息的快速发展,中国的军用无人机地位迅速提升,研制方向也逐步完成转型,提升了隐身技术、躲避地空导弹袭击的能力。
与载人飞机相比,无人机有许多令人憧憬的美好前景。
第一,无人机体积小,重量轻,隐蔽性好,环境适应性强,并逐步向微型化发展。在军事方面,无人机适合在丛林、山地、高原等复杂环境级特殊条件下进行特种部队和小分队作战,也可在未来战争中执行低空侦查、电子干扰、通信等重要任务[2]。在民用方面,无人机可在野外场地里垂直起飞和降落,不需要专门的机场和跑道,弥补了不利交通条件下人工无法作业的缺陷。
第二,无人机正朝向高度智能化发展,以便更好的应对突发事件。目前的无人机仍以人工控制为主,这样存在着一定的弊端和风险,如面对恶劣电磁条件和天气环境时,很容易因缺少应急能力而发生危险状况。而在未来,无人机的发展思路将朝着更强大的自主运行能力来发展,即既能由人工对无人机进行远程操控,又能让无人机独立完成自主工作。未来的无人机,可按照预先的编程和命令来完成预定任务,并能对随时出现的目标及时作出反应[3]。
第三,无人机正朝着多功能化和模块化的方向发展。除了广泛应用于军事领域之外,无人机还可应用于公共安全、应急搜救、工程建设、农业生产、缉毒反恐、环境监测、通信中继、航拍等领域,并在这些领域中发挥自身的作用。
除了具有美好的发展前景之外,无人机的大量出现也存在着一些不可估量的危险。近年来,国内无人机违法违规运行(俗称“黑飞”)威胁民航安全的事件频频发生,多家机场接连发生的疑似无人机扰航事件也受到了舆论的广泛关注。
2015年底,美国联邦航空管理局(FAA)开始对小型无人机进行实名网络注册,这意味着无人机开始逐步实现市场化,也呈现出规范化的趋势。而从2017年6月开始,中国也正式对质量在250克以上的民用无人机实施实名登记注册。
今后,无人机的自主导航功能将成为其发展趋势,以降低可能造成的风险。而自主导航的核心技术便是航迹规划。谁能掌握更先进的无人机航迹规划技术,谁就能在一定程度上占据无人机自主导航市场的上风。
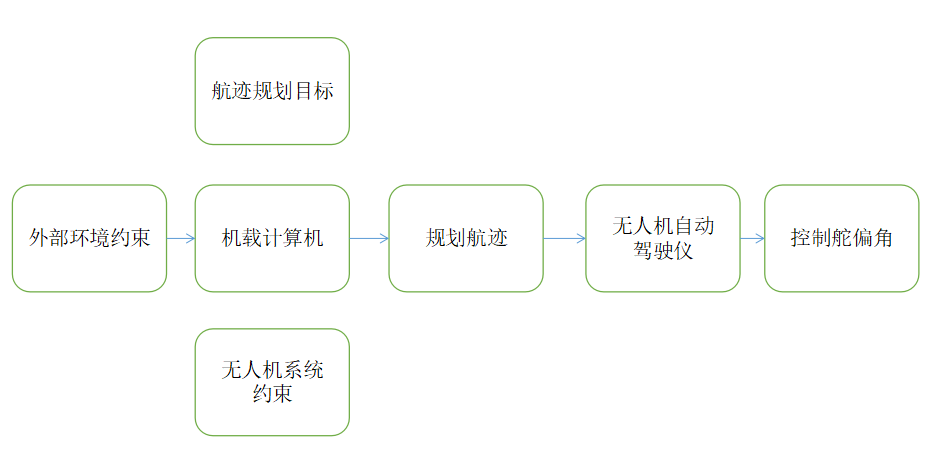
无人机航迹规划,即通过设计和计算,得到一条从起点至终点的最优飞行路径。这条路径需要满足飞行任务中外界环境条件和无人机自身性能的制约,以确保无人机可以在安全高效的前提下完成相应的飞行任务。航迹规划,作为无人机安全飞行和精确打击的关键一环,正逐渐成为全世界研究人员关注和探讨的重中之重。
1.1.2无人机航迹规划国内外研究现状
无人机航迹规划是无人机作战能力的关键组成部分,针对这一内容开展的研究深入而广泛,并且取得了较为丰富的研究成果。在早年间,受困于计算机技术水平的限制,航迹规划基本依赖于规划团队的手工操作,效率和精准度都不高;直到20世纪末,无人机航迹规划才逐步摆脱手工操作,取而代之的是借助计算机进行实际操作。
近年来,随着敌方防空系统自动化、信息化和网络化水平的不断提升,无人机安全受到了极大威胁,这一情况下,也促使了对无人机执行任务能力的要求越来越高,同时迫使着对无人机航迹规划技术的深入研究和不断推进。
自从路径规划问题提出以来,国内外众多专家学者及研究人员都对该问题进行了许多深入的研究。早在1998年,Pachter等研究人员就已经开展了相关研究[4];而Twigg[5]等人采用遗传算法对无人机航迹规划问题进行了进一步的解算。在国内,西北工业大学的李为吉[6]、柳长安、陈冬[7],北京航空航天大学的王英勋[8]、廖沫[9]、申功璋[10]等人都在该问题上进行了一定的研究,并发表了多篇相关的学术论文和专著。
在近几十年的研究过程中,无人机航迹规划的方法得到了全面而广泛的挖掘和展现。这些方法可简单进行归类。
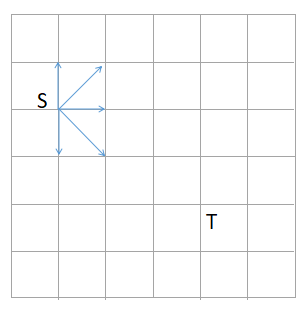
按照规划空间来看,航迹规划可分为栅格划分法、矢量图形法、概略图法以及势场表示法。在这几种方法中,前三种都运用了图形参与空间规划;而最后一种势场表示法,则是将物体运动看作是两种力的作用的结果,进而通过寻找合力的方向而找到捷径。
除此之外,还有多种改进的算法得到了广泛的认可和采用。如张雅妮提出的“一种基于改进A*算法的三维航迹规划方法”[11],如陈冬提出的“基于粒子群优化算法的无人机航迹规划”,以及王英勋等提出的“基于遗传算法(GA)的具有约束的飞行轨迹规划”等等。在2005年,白俊强[12]等提出了“基于蚁群算法的无人机航路规划”,大胆地将蚁群算法同无人机航迹规划实现了结合。这一新产物在随后的几年中被不断改进,陈谋等人都在改进的过程中发表了全新的观点和内容。
在无人机航迹规划的各种方法中,每一种方法都有自身的优势和不足,在常见的几种方法中,蚁群算法公式较为简单,编程较为简便,但很难解决大规模复杂化的问题;遗传算法中,染色体编码长度需动态修正,编程难度很大;神经网络算法可有效解决无人机地形跟随和障碍回避等问题,但仍不能解决外界环境中的其他威胁[13]。在我们的实际任务执行过程中,我们可根据需要,以及条件的限制,合理选用不同的方法,或是将多种算法相结合,从而达到最高的效率。
1.2有关蚁群算法的相关研究
1.2.1蚁群算法综述
蚁群算法,是近二十年发展起来的一种模拟昆虫王国中蚂蚁群体智能行为的仿生优化算法,它具有优良的鲁棒性,有良好的分布式计算机制,并且能够很好地与其他方法相结合,能够灵活地运用于许多行业和领域。
下面介绍蚂蚁算法所依据的基本原理:
蚂蚁在行进过程中,可以在它经过的路径上留下信息素,并且,蚂蚁可以感知这种物质的存在,并能感受到信息素的强弱,来指导自己向特定的方向移动。一方面,蚂蚁会倾向于往信息素浓度高的方向移动;另一方面,在相同时间内,较短路径上的信息素遗留的比较多,因而选择较短路径的蚂蚁也更多。
通过上述现象我们了解到,由于大量蚂蚁组成的蚁群集体行为表现出信息正反馈现象,也就是说,在某一路径上,通过的蚂蚁数量越多,后来的蚂蚁选择该路径的概率就越大。蚂蚁个体之间通过这样的信息交流机制进行食物的搜索,并最终沿着最短路径行进。
蚁群算法在众多领域中都有着广泛的应用,比如车间作业调度问题、网络路由问题、机器人领域问题、生命科学问题、图像处理问题、数据挖掘问题等。作为一项处于发展初期的算法,蚁群算法的未来注定拥有广阔的前景和发展空间。
1.2.2蚁群算法国内外研究现状
蚁群算法是一种基于蚂蚁行为的最短路线选择方法,它第一次被提出是在1991年的第一届国际人工智能会议上,当时被称为蚂蚁系统(Ant System,简称AS),但这一算法在提出之后并未得到广泛的重视。直到1996年,Dorigo等人发表了一篇题为“Ant system:optimization by a colony of cooperating agents”的文章,这篇文章系统地阐述了蚁群算法的原理及其数学模型。文章还将蚁群算法同其他算法进行了实验对比[14];并把解决对称TSP问题延伸到了解决非对称TSP、指派问题(quadratic assignment problem,QAP)和车间作业调度问题(job-shop scheduling problem,JSP)。这一内容,被世人称作蚁群算法发展历程中具有里程碑意义的开创性论文,并引起了世界许多研究者的广泛关注。
从1998年起,每两年一届的蚁群算法国际学术研讨会(ANTS)在比利时布鲁塞尔正式召开,这也进一步促进了蚁群算法理论的蓬勃发展,也让蚁群算法成为了人工智能优化领域的研究热点。
在近20年时间里,国际期刊《Nature》上多次对蚁群算法的最新研究成果进行报道,凸显出了蚁群算法的地位和迅猛进步的势头。Gutjahr[15]将蚁群算法的行为简化为在一幅代表所求问题的有向图上的行走过程,从而证明了图搜索蚂蚁系统(graph-based ant system,GBAS)的收敛性。Bullnheimer[16]等提出了带精英策略的蚂蚁系统,使最优解在下一个循环过程中对蚂蚁有更大的吸引力。Thomas Stutzle等提出了最大最小蚂蚁系统(MAX-MIN ant system,MMAS),使每条边上的信息素轨迹量的值域范围控制在一个特定的区间之中。
国内对蚁群算法的研究开始于上世纪90年代后期,国内最早研究蚁群算法的是张纪会与徐心和教授[17]。2001年,17岁的陈烨提出了“带杂交算子的蚁群算法”[18],并开发出了“蚁群算法实验室”,引发了国内的热议。近年,徐精明[19]等提出了多态蚁群算法,对蚁群合理分工,加快算法收敛。张超[20]等提出了粒子群参数优化的改进蚁群算法,可有效减少粒子群算法调用蚁群算法的迭代次数。
而经过20余年发展的蚁群算法,早已不再局限于解决TSP问题,而是已经渗透到了社会生活中的方方面面。它可以用来解决许多复杂系统的组合优化问题,如TSP问题、机器人路径问题、数据挖掘问题、图形着色问题、任务分配问题、物流配送问题、地雷探测问题、道路交通系统控制问题等,同时,算法也由一维静态延伸到了多维动态,并得到不断地丰富和拓展。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


