一种新型的内置式永磁同步电机无位置传感器复合控制策略研究毕业论文
2020-04-08 14:26:13
摘 要
内置式永磁同步电机具有的特点是功率密度高,它现如今已经广泛应用于工业现场、电动汽车、家用电器等领域。对电动机性能产生不可忽视影响的是其中永磁体的放置方式。转子结构中的永磁体位于转子铁芯的外表面,这种转子结构具有很简单的特点,产生的异步转矩很小,因此在适合于对启动要求不高的场合应用不多。内置式转子结构中的永磁体位于鼠笼导条和转轴之间的铁芯中,它拥有良好的启动转矩,目前为止在绝大多数永磁同步电动机中都运用了这种结构。
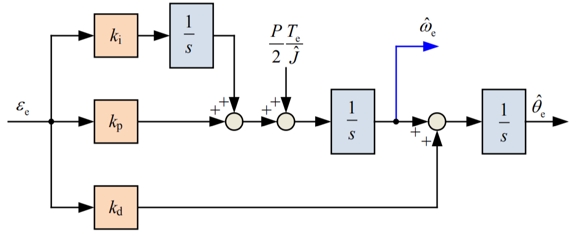
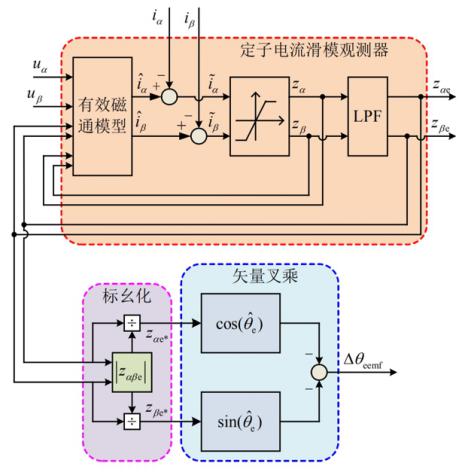
如今现有无传感器复合控制方法各有其特色,我们为了能够提高复合控制方法的实际应用能力并并降低运算的复杂程度,仍需对两类方法简单且有效的融合方式进行更深入研究。我们在低速域中采用方波电压注入法、在中高速域中,采用反电动势模型法,就可以获得标幺化位置的误差信号。过渡区域可以通过速度信息对标幺化位置误差信号进行加权融合计算,同时采用单 Luenberger 位置观测器实现转子位置实时观测。本论文中采用无位置传感器复合控制技术来进行IPMSM同步电机矢量控制研究,它运用了运用高频方波电压注入法和模型法,解决了低速至高速或高速至低速切换区转子位置和转速出现跳变的问题。
关键词:无传感器、复合控制、方波电压注入法、反电动势模型法、加权融合
Abstract
The interior permanent magnet synchronous motor (PMSM) is characterized by high power density and high torque current. It is now widely used in industrial field, electric vehicle, household electric appliance and so on. The placement of permanent magnet has great influence on the performance of permanent magnet. The permanent magnet in the surface of the rotor structure is located on the outer surface of the rotor core. This rotor has a simple structure and can produce very small asynchronous torque, so it is seldom applied to the occasion which is not suitable for the start of the rotor. The permanent magnet in the built-in rotor is located in the iron core between the squirrel cage guide bar and the rotating shaft, and its starting performance is good. At present, this structure is used in most permanent magnet synchronous motors.
The existing sensorless composite control methods have their own characteristics. In order to further improve the practicability of the composite control methods and reduce the computational complexity, two kinds of simple and effective fusion methods are still needed to be further studied. In the low speed and middle high speed domain, the square wave voltage injection method and the back EMF model method are used to get the position error signal respectively. The transition region can calculate the unitary position error signal by the speed information, and use the single Luenberger position observer to realize the real-time observation of the rotor position. In this paper, the vector control of IPMSM synchronous motor is studied by using the position sensorless compound control technology, and the high frequency square wave voltage injection method and the model method are used to solve the problem of the rotor position and speed jump at low speed to high speed or high speed to low speed switching area.
Key words: sensorless, compound control, square wave voltage injection method, back EMF model method, weighted fusion
目 录
摘要 I
Abstract II
目录 I
第1章 绪论 1
1.1研究目的和意义 1
1.2 国内外研究现状 2
1.3 研究内容 3
第2章 IPMSM的相关数学模型 5
2.1 IPMSM概述 5
2.2 坐标变换 6
2.2.1 α-β坐标系数学模型 6
2.2.2 d-q坐标系数学模型 9
2.3 IPMSM的数学模型 10
2.4 本章小结 11
第3章 控制方法设计 12
3.1 IPMSM矢量控制概述 12
3.2 IPMSM矢量控制原理 13
3.2.1 低速控制方法设计 14
3.2.2 高速速控制方法设计 16
3.3 无位置传感器复合控制方法 18
3.4 本章小结 20
第4章 仿真研究 22
4.1 仿真结果分析 22
4.5 本章小结 27
第5章 总结与展望 28
5.1 研究总结 28
5.2 研究展望 29
致谢 30
参考文献 31
附录 33
第1章 绪论
1.1研究目的和意义
通常情况下,PMSM是通过各种不同的传感器来确定转子位置,通过这些传感器的联合共同作用,才能保证了永磁同步机的可靠起动然后正常运行,但它与普通异步电机的运行状态又存在着各种各样的差异,例如:永磁同步机启动之后,转子转速与电源工频频率50Hz保持着很好的同步,更重要的是,它的机械特性硬的特点相当硬。当工频50Hz电网直接给永磁同步机供电的时候,它的定子磁动势则会与工频频率保持同步转速旋转,但是因为永磁同步机机械惯性的作用,会导致永磁同步机的后滞性很大,在这种情况下,它就不能很好地配合同步转速进行正常地运。当永磁同步机转矩角的周期变化呈现2π变化时,电磁转矩的变化规律就会变为正弦状态,这个时候,在一个正弦周期内电磁转矩的均值就会突变为零,按照惯例这个时候的永磁同步机是不能正常起动的。即便是特殊情况下,就算永磁同步机在错误的条件下在工频电网下偶然起动了,一旦电机的负载转矩加大,永磁同步机的转子速度就会急剧减慢,使得转矩角很快增大,假设这时候转矩角进入到了一块不稳定的区域,反而会出现一个奇怪的现象:电机的电磁转矩会减小,这导致的后果是电机的转矩角会一直不断地增大,相反的电磁转矩则会不断减小,这一现象导致了永磁同步机转速会偏离工频频率同步转速,这也就是我们电力行业中所说的永磁同步机失步现象。
既然有位置传感器存在问题,研究并且开发出一种更加有效的内置式永磁同步电机无位置传感器复合控制策略,已经成为电力行业生产过程中的一种实际需求。然而根据现有的资料显示,内置式永磁同步电机无位置传感器复合控制策略大多处于最开始的研究和开发的原始阶段,而且能够实现实际生产实用化的只是其中很小一部分的幸运儿。我们在将内置式永磁同步电机无位置传感器复合控制深入推广的同时,还要面临着许多理论和技术上的难题。但是令人感到尴尬的是,到今天为止都还没能开发出一种十分可靠的方法,可以用来独立实现永磁同步机无位置传感器的整个速度范围控制。在这样艰难的背景下,将内置式永磁同步电机作为研究对象,探索出一种可行可靠的无位置传感器复合控制策略的研究,在IPMSM无位置传感器矢量控制领域做出一些有意义的探索就显得至关重要。根据转速的应用范围存在差异,我们通常将无位置传感器IPMSM 控制技术主分为两类。其中一种方法主要被应用在高速运行范围,它的转子位置的估算主要利用基频激励的反电动势或者磁链信息,也就是我们所说的反电动势模型法;而另一中方法则主要被应用在低速或者零速范围,它的转子位置的获取主要利用电极凸极特性,这也就是所谓的高频方波注入法。无位置传感器控制技术可以显著减小系统所用体积、成本,增加系统的可靠程度,并能够在温度高、湿度大等恶劣环、境场合运行,已然成为当今研究的一种热点。
在基于内置式永磁同步机的控制系统中,速度信息和位置信息具有不可替代的重要地位。因此在实际生产活动控制中,我们都将速度信息和位置信息在闭环的条件下接入系统中,然后又可以使用旋转变压器、磁性变压器等机械传感器来获取我们所需的速度信息和位置信息。通常情况下,我们都将这些机械传传感器安装在电机的一侧用来测量运转时的位置信息。在这些传感器的帮助下,我们可以很方便迅速地获得非常快速且精度相对较高的位置信息和速度信息,所以说,有了机械传感器,永磁同步电机调速系统的控制将变得更加人性化、可视化。然而,在实际生产使用过程中,安装这些传感器的价格成本相当高昂,所占用的空间也很大,导致空间利用率低下,且这样安装的机械传感器及其容易损坏,它对安装的环境要求相当高,导致永磁同步电机调速系统不能被可靠应用于各个实际生产领域。为了解决这些问题,我们对于永磁同步机复合控制策略的研究就具有很大的实际价值。
1.2 国内外研究现状
最近几年的发展中,我们对 IPMSM 无位置传感器复合控制技术确实已取得不少研究成果。维尔特等人通过滞环控制对高频注入法和反电动势模型法进行综合分析,并且已经可以实现无位置传感器全速域运行;但是它也存在缺陷,由于采用了两组独立的电流环和位置观测器,这导致了算法运算的复杂度比较高,而且电流的反馈信号和观测的位置差异,这导致了切换过程难以避免地出现电流尖峰。在低速零速域采用高频方波注入法,中高速域采用反电动势模型法之后通过滞环控制,就是我们所要研究的过渡速域复合控制方式。
我们将基于转速信息之后通过加权函数对高频信号注入法和反电动势模型法之后的计算获得的转速和位置观测值进行综合分析,实现在低速和高速领域之间平滑地切换;但是,这种策略还需要对两类方法各自独立的位置观测器进行各自不同的设计,这一措施不仅增加了算法复杂度还增加了观测器的设计难度。托维纳等人提出了:为了对自适应全阶观观测器的位置观测值进行校正,可以在电机低速运转时注入脉振高频信号,这样一来就能实现了模型法低速或零速时稳定运行。如果在中高速采用了电压模型和电流模型相结合的磁链观测器法,那么在低速时,我们就可以直接切换到高频电压注入法,这一控制方法的可靠性和有效性可以在直接转矩控制系统中得到很好地验证。希尔法等人在推算磁链信息时,通过注入旋转高频信号获得了位置信息,低速时为了对模型法观测器进行校正,也使用了该磁链信息。
按照惯例,我们通常把矢量控制叫做解耦控制,或者也称之为定向控制,上个世纪70年代,德国科学家布莱斯科等人提出的感应电机矢量变换控制技术,开启了现代交流电机调速的新篇章,现有的交流电机调速系统具有调速范围大、调速精度高和动态响应好等优良的特点。其性能比常见的直流电机调速系统更好,通过矢量控制(或定向控制)技术,我们可以实现交流电机的可靠平稳调速。与此同时,伴随着电力电子技术、微型计算机科学技术、传感器开发和自动控制技术等与永磁同步电机控制系统紧密关联的技术的高速发展,以矢量控制技术(或定向控制技术)为基础的永磁同步电机调速系统的发展也进入异常迅猛的阶段,人们对于永磁同步电机矢量控制技术(或定向控制技术)的研究也愈发地深入细致。我们可以看到,最近十年来,悄然兴起的交流电机直接转矩控制(DTC)技术,把人们从繁琐异常的坐标变换劳动中解放了出来,由这种控制形同所组成的的电机控制系统在直接面对交流电机的磁链和转矩时,可以使被控的永磁同步机电机获得比较快速的转矩响应,从而提升了电机的动态性能。尽管目前我们在攻克直接转矩控制技术时,还面临一系列例如冲击大、稳定性差、条件苛刻等问题,但我相信,只要微型计算机技术及自动控制技术保持着发展,这些问题都将被迎刃而解。
1.3 研究内容
本文主要的研究内容是:在基于无位置传感器复合控制技术的基础上,进行IPMSM同步电机矢量控制研究,运用高频方波电压注入法和模型法解决切换区转子位置和转速出现跳变的问题。这个方案综合了IPMSM无位置传感器控制方法在低速和高速的运行特点,通过加权计算,实现在低速、高速切换时的稳定性和可靠性。通过对原理和工作方式进行了深入分析,并且运用matlab/simulink对其进行仿真并且验证了其结果的准确性。
第1章介绍了永磁同步电机的矢量控制的发展历程,还对本课题研究做了一个简要的分析,本文在讨论了本课题研究的目的及意义的同事,还对国内外研究现状进行了比较详细的了解。最后对本文所研究的内容、原理、方案拟定了一个粗略的框架。
第2章分别介绍了两个数学模型:高频方波注入法和反电动势模型法,前者适用于低速或者零速而后者则使用于中高速,在低速、高速切换时,可根据加权值来决定二者的使用权重。
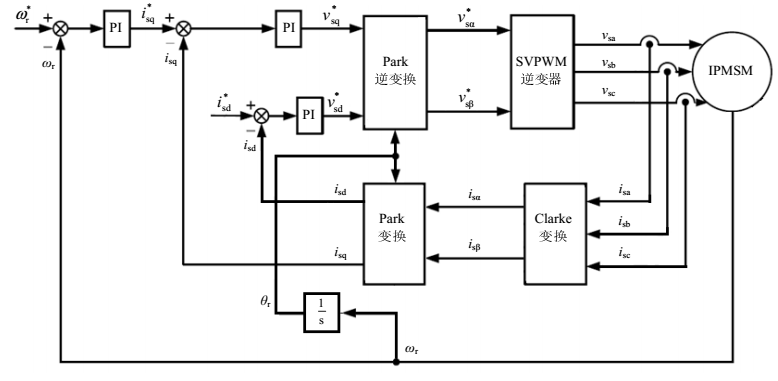
第3章首先建立了一个IPMSM物理模型,便于对IPMSM的本质规律和各种控制算法的分析与研究。随后通过IPMSM矢量控制原理图依次研究了低速时的高频方波注入法和高速时的反电动势模型法。最后,通过结合高频方波注入法和反电动势模型法,着重研究了高低速切换时的复合控制方法。
第4章主要介绍了所运用的 matlab/ simulink进行了简单的介绍然后不仅对所研究的永磁同步机矢量控制框图进行了分析,在搭建了仿真模型之后又对仿真模型的主电路拓扑结构进行了细致的研究分析。最后,在对仿真结果进行了综合的分析之后,总结了本文所研究采用的复合控制方案的优越性。
第2章 IPMSM的相关数学模型
2.1 IPMSM概述
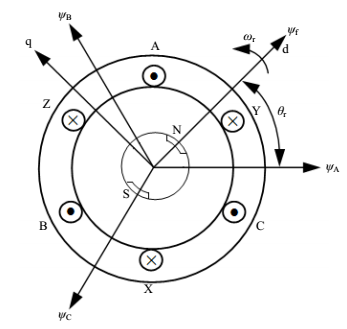 图2-1 IPMSM的物理模型简图
图2-1 IPMSM的物理模型简图
如图2-1所示:这是一台内置式永磁同步机的的物理模型图,定子三相绕组分别为如图所分布,三相定子电流分布也可以从上图看到,从上图可以看出每相绕组中电流的正方向。正电流流过每相绕组,之后产生的磁动势经过了一条轴线,我们将这条轴线定义为相绕组的轴线,可以注意到图中静止的三条轴线的就是电机定子的三相绕组轴线,如果这时候电机转子以角速度 旋转,并且保持转速和电磁转矩的正方向为逆时针,负载转矩正方向为顺时针,转子永磁体的磁链为
旋转,并且保持转速和电磁转矩的正方向为逆时针,负载转矩正方向为顺时针,转子永磁体的磁链为 。为方便后续分析工作的展开,我们规定d轴是沿转子永磁体磁链方向,很显然,与d轴正交的就是q轴,同时保持dq坐标系与转子保持同步旋转,假设d轴与A轴的夹角为
。为方便后续分析工作的展开,我们规定d轴是沿转子永磁体磁链方向,很显然,与d轴正交的就是q轴,同时保持dq坐标系与转子保持同步旋转,假设d轴与A轴的夹角为 ,那么它很显然是一个在不断变化着的量。
,那么它很显然是一个在不断变化着的量。
建立IPMSM的数学模型时,为方便分析,作如下五点假设:
1)在保持内置式永磁同步机定子绕组三相对称的基础上,ABC三相绕组轴线在空间上互相间隔120°的电角度。
2)由于存在磁路饱和,以及磁滯、涡流等各方面的损耗,磁路是线性的,因此我们忽略以上损耗,且认为各想绕组的自感、互感都恒定。
3)忽略高次谐波,气隙磁场按正弦分布, 感应反电动势亦如是。
4)不考虑频率等因素对内置式永磁同步机各相参数的影响。
5)转子上没有阻尼绕组也没有阻尼作用。
想要达到高性能的转速闭环控制,我们必须先通过坐标变换,把内置式永磁同步机的三相物理模型转换成精确的数学模型,这样才有助于对内置式永磁同步机的内部规律和复合控制策略的分析研究工作。
2.2 坐标变换
坐标变换是矢量控制的基础和重要组成部分,本节详细分析了坐标变换的原理,为之后建立IPMSM数学模型及矢量控制研究准备基础。本文坐标变换遵循以下两个原则:①在对电流分量进行坐标变换前后,保持所产生的旋转磁场等效;②进行坐标变换前后,不改变两个系统的总功率。
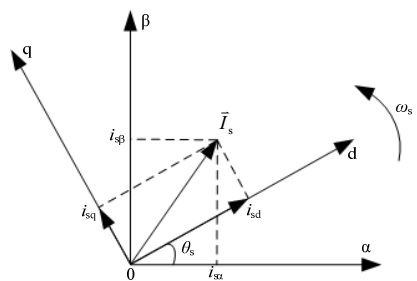
2.2.1 α-β坐标系数学模型
通常情况下,我们将三相静止ABC坐标系向两相静止αβ坐标系转换,并且称这种转换为Clarke变换。
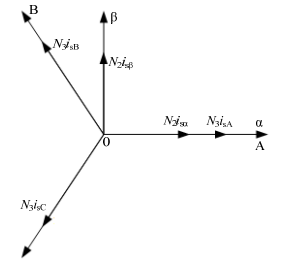 三相电动机绕组的磁动势矢量和两相电动机绕组之间的磁势矢量的空间位置,关系如图2-2所示。
三相电动机绕组的磁动势矢量和两相电动机绕组之间的磁势矢量的空间位置,关系如图2-2所示。
图2-2 三相ABC绕组和两相αβ绕组各相的磁势关系
根据上面所提的坐标变换原则,三相电动机和两相电动机的磁势应该完全等效,完全等效的意思则是合成磁势矢量分别在两个坐标轴上的投影相等,此时就有:
 (2-1)
(2-1)
这个时候可以把式(2-1)表示成矩阵形式:
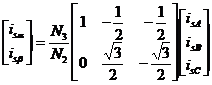 (2-2)
(2-2)
由于转换矩阵 不是一个标准的方阵,因此不能对它进行求逆矩阵,这时候我们就应当引入一个独立于
不是一个标准的方阵,因此不能对它进行求逆矩阵,这时候我们就应当引入一个独立于 和
和 的新变量
的新变量 ,我们把它称为零轴电流,定义:
,我们把它称为零轴电流,定义:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


